Curso de Controle Automático III
(Controle Digital)

Tópicos:
1. Introdução
- Introdução à disciplina;
- Sequência prevista das aulas;
- Sugestão de instalação de MATLAB para esta disciplina;
2. Teorema de Amostragem
Teoria Sistemas de Amostragem (Modelagem do processo de amostragem, Diagramas espectrais, Etapas processo)
Simulação demonstrando Teorema da Amostragem (Amostrando uma onda dente-de-serra)
3. Transformada Z
- Parte 1: Definições, conceitos iniciais, primeiras transformadas;
- Parte 2: Transformadas de alguns sinais, Propriedades da Transformada Z;
- Parte 3: Métodos de Transformada Inversa de Z;
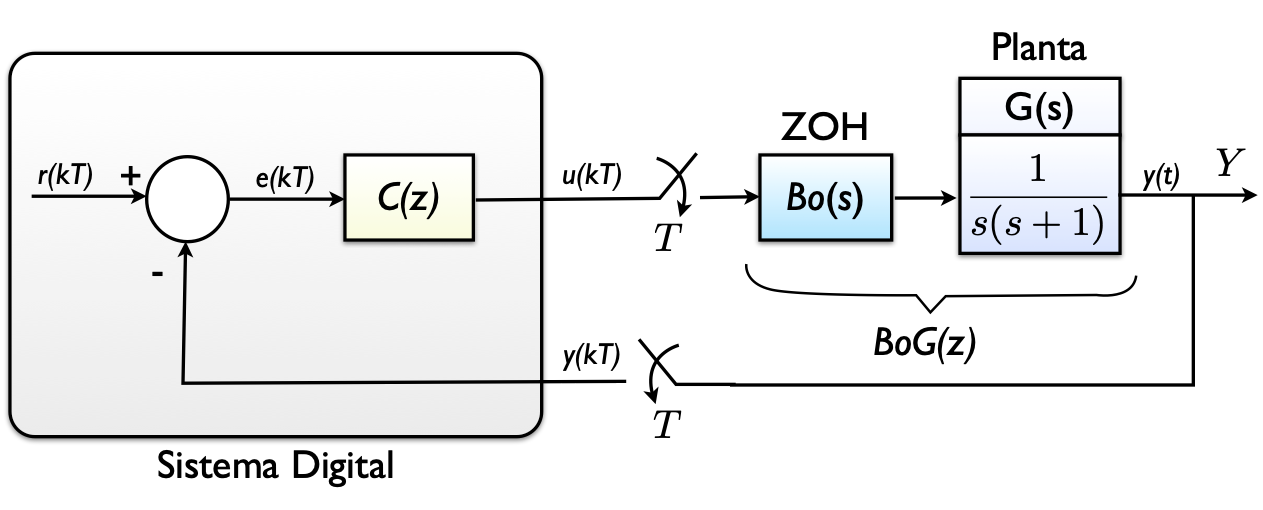
- Modelagem do Sustentador de Ordem Zero (Z.O.H., ou ).
- Incorporando o Sustentador de Ordem Zero, cálculo de deduções e simulações (1o-exemplo de sistema de 1a-ordem digitalizado)
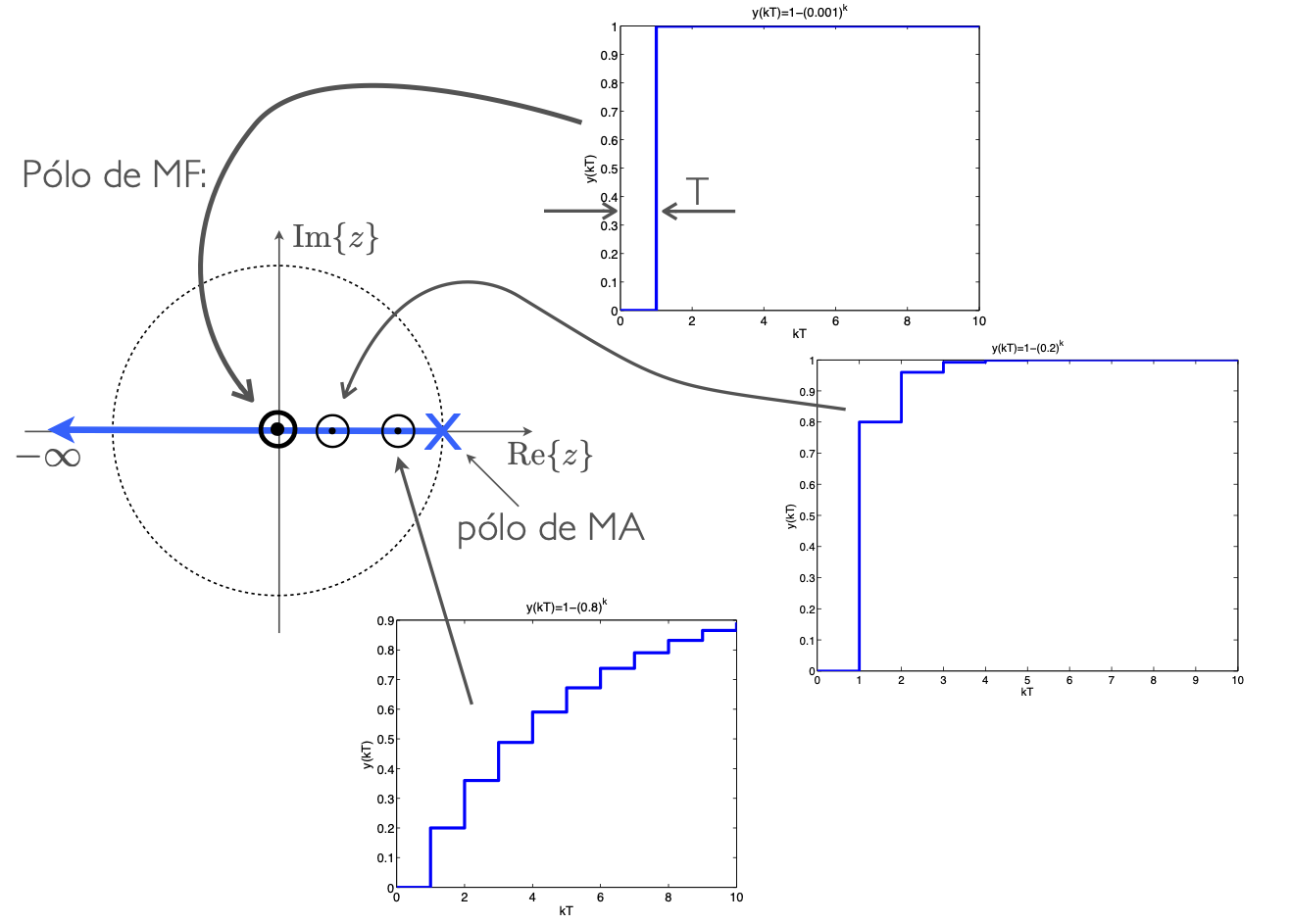
- Impacto (ou falta) do num sistema MF de controle;
- Resumo final Transformada Z (partes principais).
4. Teoria do Erro
- Teoria do Erro (papel do integrador);
5. Estabilidade
- Estabilidade Método de Jury Aplicação (Demonstração de que: ).
6. Projeto de Controladores: Estudo de Caso
Sequência prevista para as aulas (Estudo de caso: planta única: diferentes controladores);
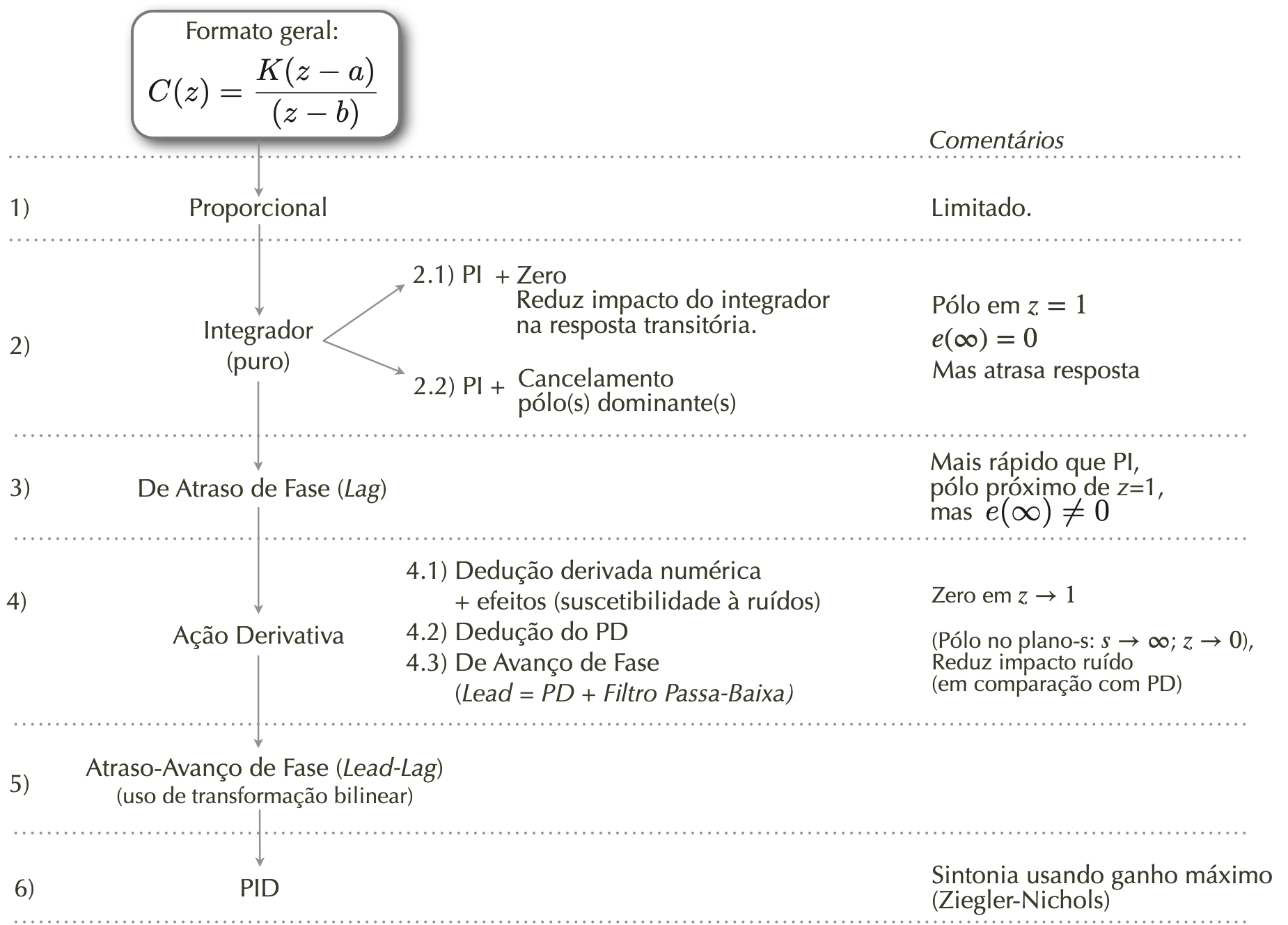
Controlador com Ação Proporcional:
Controladores com Ação Integral:
- Controlador Proporcional com ganho definido em função do (inclui controlador I, PI, com estudos de opções de local para zero do controlador) - [ aula de 23/09/2021 ];
- Controlador com Ação Integral Pura + Controlador PI (c/dedução) + PI com cancelamento do pólo dominante, [aula de 14/05/2020];
- Projeto de PI = Controlador Proporcional + Integral Puro [aula de 07/10/2020];
- Outros projetos de Controlador Ação Integral Pura e PI incluindo comparações - (aula de 05/05/2021).
- O que acontece quando se tenta acrescentar +Integradores em Sistema tipo 1 ? [aula de 07/10/2021];
- Projeto de Lag (com teoria) (PDF);
- Projeto de Controlador PI + Lag (aula de 14/10/2020)
- Controlador por Atraso da Fase (Lag): Aula de 21/05/2020;
Controladores com Ação Derivativa:
- Teoria inicial sobre Ação Derivativa + Filtros: (Abrange: Derivador Puro, Amp.Op. como Derivador Ideal x Amp.Op. Derivador Realizável, Efeito da Derivada sobre Sinal Ruidoso (simulações), Uso de Filtro Passa Baixa (FPB), Equação + Diagrama de Bode de simples filtro RC (1a-ordem), Filtro Exponencial Digital de 1a-ordem, Filtro Exponencial Duplo (de 2a-ordem), Filtro de Média Móvel).
- Resumo Controladores PD & Lead) (arquivo PDF; Aula de 21/05/2020);
- Projeto de PD (sem contribuição angular (Aula de 28/10/2020;
- Projeto de Controlador PD (Aula de 28/05/2020)
(Avaliando diferentes posições para o zero do PD + Projeto de PD usando contribuição angular usando scripts:
angulos2.m+arc.m) - Projeto de Lead, usando contribuição angular (Aula de 11/11/2020);
- Simulink: Teste de Controladores com Ação Derivativa (Simulaçãoes ressaltando elevadas ações de controle; uso de bloco Saturador no Simulink)
- Projeto de PD e melhorias usando App Control System Designer (aula de 20/10/2023).
Controlador Deadbeat -- projeto(s):
Teoria Controlador por Tempo Mínimo (PDF);
Reparando nas amplitudes das ações de controle (Lead, Lead x outros), Projeto de controlador deadbeat - Aula de 08/10/2019 ;
Projeto de deadbeat: Aula de 11/11/2020;
Projeto de deadbeat: Aula de 09/06/2021.
Projeto de Controlador PID
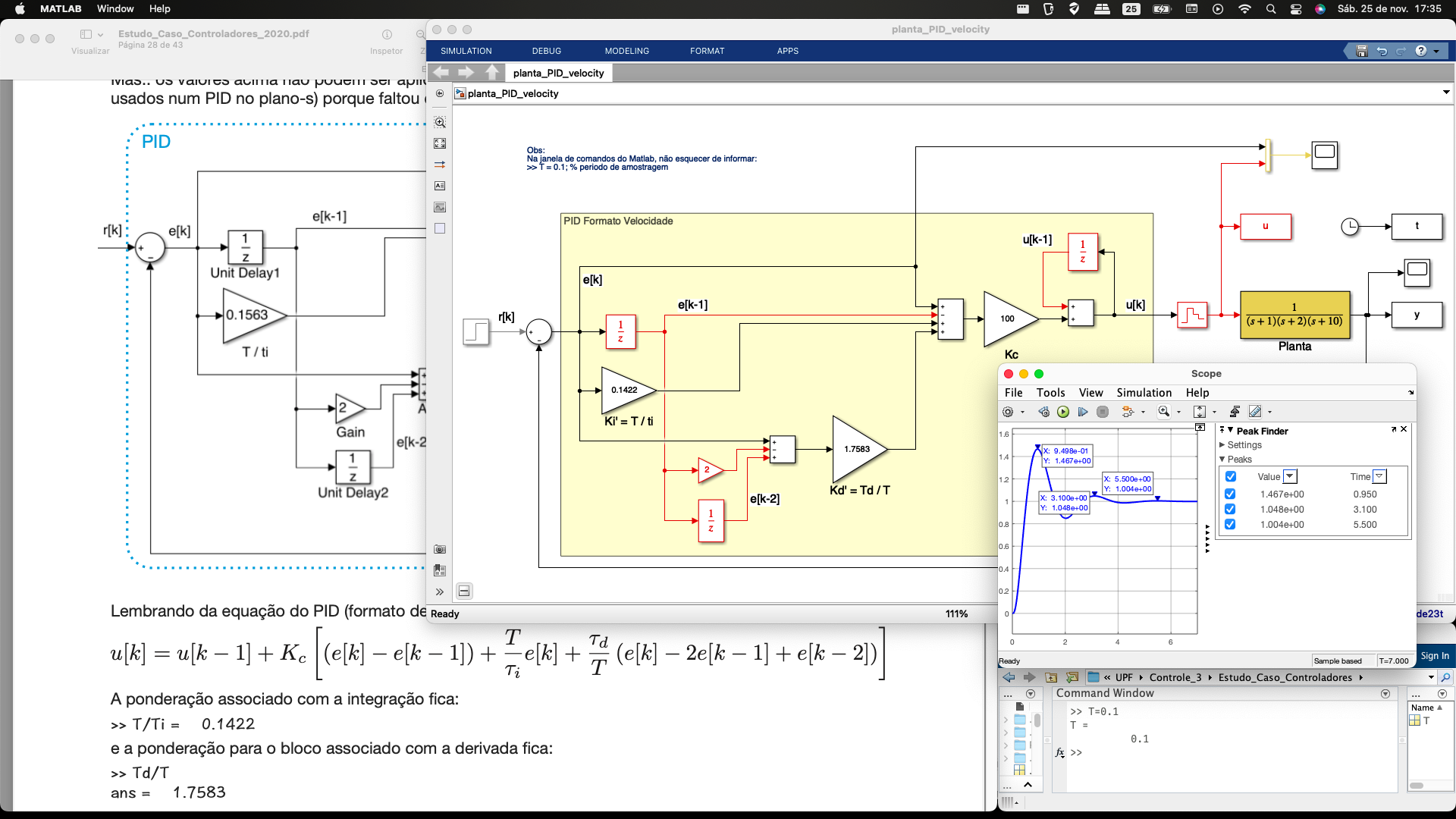
Base teórica controladores PID (Arquitetura ISA, arquitetura Paralela, integrações numéricas (retangular e trapezoidal), derivada numérica, filtro passa-baixas para ação derivativa, saturação integral, PID no formato de Posição, PID no formato de Velocidade)
Métodos de Sintonia de PID (resumido) (Sintonia usando Zigler-Nichols, buscando (Ultimate Gain) e (Ultimate Period)
Projeto de PID, arquitetura ISA, formato de Velocidade:
- Aplicaddo à planta do estudo de caso: ver [PDF] à partir da página 24;
- PID formato velocidade: figura demonstrativa + arquivos Simulink: arquivo .SLX ou arquivo .MDL (versões antigas Matlab/Simulink).
Projetos por Emulação
- Transformadas bilineares (Euler, Tustin, outras, exemplos)
- Projeto de PID por emulação (tentando usar Tustin, usando Euler + Tustin).
{kind=link}
{kind=link}
{kind=link}
{kind=link}
7. Implementações de Controladores Digitais
- Equações de Diferença Controladores Digitais (dedução do algoritmo de controle);
- Implementações de algoritmos de controle digitais
- Exemplo de implementação real em laboratório: Processo da Bola no Tubo (TCC de 2006). 🎈
Material Extra
- Usando App Control System Designer (Tutorial introdutório); 🙂↕️
- Simulações de controladores Digitais usando Simulik (PDF) (Lidando com "Data types" das janelas Scope);
- Sugestão de instalação de MATLAB para esta disciplina;
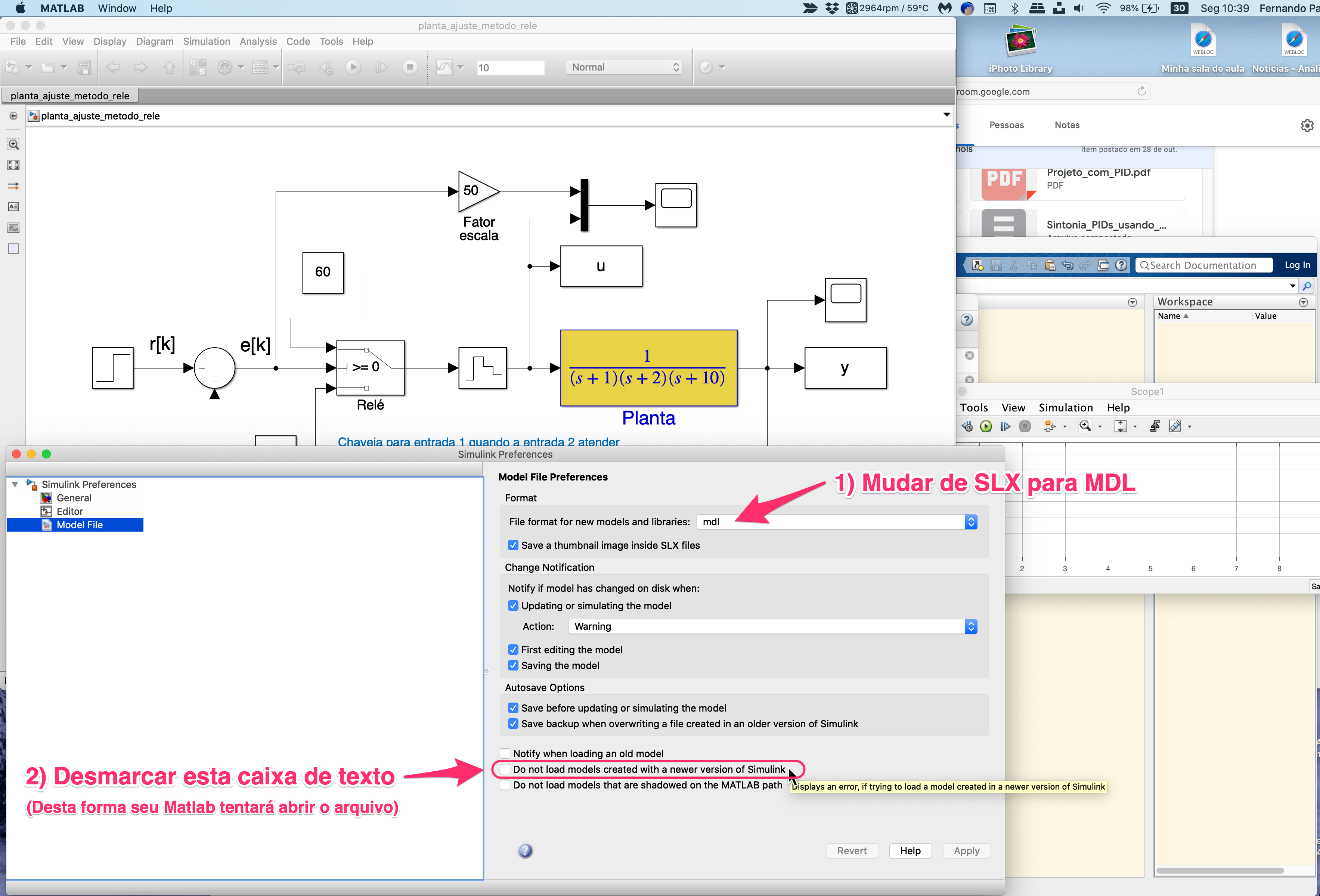
- Como abrir arquivos SLX originados de diferentes versões do Matlab/Simulink ➞ figura
- ✒️ Aulas de 2023/2.
- ✒️ Aulas de 2024/1.
- ✒️ Aulas de 2025/1.
- 📖 "Apostila/Livro" criado incialmente para esta disciplina em 2020 (75% completa).
{kind=link}