Implementação de Controlador
Seja um controlador digital genérico que segue a equação:
Este controlador pode ser implementado da seguinte forma:
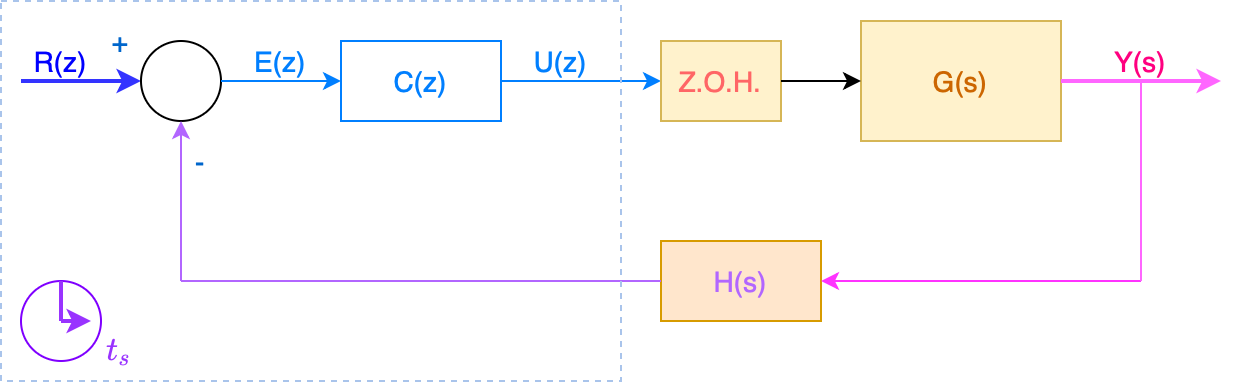
O mesmo se encontra dentro de uma malha como:
Extraíndo equações, obtemos:
ou
isolando o termo :
o que permite escrever:
onde:
corresponde ao sinal de controle atual;
corresponde ao sinal de controle calculado na amostragem anterior (uma amostra de atraso contra a atual);
corresponde ao sinal de erro atual, calculado como:
corresponde ao sinal de erro calculado na amostragem anterior (uma amostra de atraso);
sinal de referência atual;
resposta (saída) atual do processo.
Porém note que a eq. (1) não é diretamente incorporada num algoritmo de controle, pois da forma de está apresentada, implica uso de de vetores, e não temos como prever ou limitar o tamanho máximo de cada um dos vetores envolvidos nesta equação.
O que se realiza na prática é transforma cada um destes vetores numa variável escalar (dimensão ), diferente. E assim o algoritmo final de controle fica como:
/*********************************************************************************** ROTINA DE CONTROLE (INTERRUPÇÃO) **********************************************************************************/void cont1(void) interrupt 3 { y = ReadAD(canalSensor); // leitura da saída atual do processo e = r - y; // calculando sinal atual do erro u = K*e + K*a*e1 - b*u1; // sinal de controle atual Motor.out(u); // aplica sinal de controle no processo, via D/A ou PWM // segue atualização de variáveis para próximo ciclo de amostragem: u1 = u; e1 = 1;}Note que as variáveis K, a, b e r devem ser globais, isto é, propositalmente podendo ser alteradas em outra parte do código. Isto permite mudar a posição do zero do controlador () ou a posição do pólo deste controlador () e ajustar seu ganho () em outra parte do software que controla o processo, mesmo com o algoritmo de controle sendo edxecutado, em "tempo-real". Note que r, a referência, sendo global, também permite que o usuário varie o valor da referência com o algoritmo de controle sendo executado. E em alguns sistemas, r é calculado via "gerador de trajetórias" (caso de robôs industriais, ou máquinas CNC), usando outra rotina ativada por interupção que éexeccutada na mesma frequência com a qual é executada a rotina de controle.
As variáveis u1 e e1 devem ser inicializadas ANTES do algoritmo de controle ser executado. Para tanto podem ser incializadas com zero. Mas o melhor seria, no caso de sistemas que permitem transitar entre controle em autimático (em malha-fechada) e controle manual (em malha-aberta), atualizar estas variáveis, da seguinte forma quando passamos do controle manual para automático e antes de liberar a rotina (tratamente do interrupção anterior):
xxxxxxxxxxu1 = // valor atual do sinal sendo enviado para planta;e1 = r - y; // determinando atual valor do erro.Esta atualização evita "saltos" (gaps) na resposta do sistema quando o usuário do sistema de controle comuta do modo manual para o automático.
O programa completo ficaria algo como:
x// exemplo de rotina para ADuC 832unsigned int leitura,h_ref,h_real,*sensor,*altura,*duty_saida;int erro0,erro1,erro2;float Kc,Ti,Td,Ts=0.047,u0,u1,nominal=70; // Note: Ts = periodo de amostragem adotado...void main(void){ PLLCON=0x50; //Define o clock - 16,78MHz, ciclo demaquina - 0.72us CFG831=0x41; //Define o PWM na porta P3_3 e ativa o uso da XRAM interna TMOD=0x11; //Configura os temporizadores T0 e T1 p/ 16 bits, modo 1 TCLK=1; //Configura o timer 2 para gerar a taxa de trasmissao serial SCON=0x40; //Configura o canal serial UART no modo 1 RCAP2H=0xFF; RCAP2L=0xC9; //Valor de recarga do timer 2 - Taxa de transmissao=9600bps PWM1L=200; PWM1H=0; //Define a frequencia do PWM - f=21KHz grava_dados(); inicializa_display(); inicio(); //Telas inicias do projeto ajuste_manual(); //Ajuste inicial manual necessário while(1) { controle=0; //Define qual o controlador em funcionamento amostra=0; //Define os dados a serem trasmitidos escolha(); parametros_PID(); ADCCON1=0x8C; //Ativa ADC p/ simples conversão e clock=2,1MHz //cada conversao demora 4 ciclos de clock do AD=2us PWMCON=0x17; //Liga o PWM e define o sua frequencia - 20kHz IE=0x88; //Liga a interrupção do timer 1 TR1=1; //liga o timer 1 atualiza_PID(); TR1=0; //Desliga temporizador 1 IE=0x00; //Desativa interrupção do timer 1 PWMCON=0x00; //Desativa o funcionamento do PWM e define clock ADCCON1=0x00; //Desativa ADC contador=0; transmite(); }}.../******************************************************************************ATUALIZA OS PARÂMETROS DURANTE O CONTROLE PID*********** Esta rotina permite atualizar em "tempo real" parâmetros do sistema* como referência e ganhos do controlador* foram associadas teclas para ajustar cada parâmetro******************************************************************/void atualiza_PID(void){ unsigned char tecla; unsigned int valor; do { //escreve Kc RS=0; DISPLAY=0x80; delay(); RS=1; valor=Kc*1000; DISPLAY=','; delay(); DISPLAY=(valor%1000)/100+48; delay(); DISPLAY=(valor%100)/10+48; delay(); DISPLAY=valor%10+48; delay(); //escreve Ti if(controle=='1') //só apresenta Ti no display se for controle PID { RS=0; DISPLAY=0x85; delay(); RS=1; valor=Ti*1000; DISPLAY=valor/1000+48; delay(); DISPLAY=','; delay(); DISPLAY=(valor%1000)/100+48; delay(); DISPLAY=(valor%100)/10+48; delay(); DISPLAY=valor%10+48; delay(); } //escreve Td RS=0; DISPLAY=0x8B; delay(); RS=1; valor=Td*1000; DISPLAY=valor/1000+48; delay(); DISPLAY=','; delay(); DISPLAY=(valor%1000)/100+48; delay(); DISPLAY=(valor%100)/10+48; delay(); DISPLAY=valor%10+48; delay(); //escreve h_ref RS=0; DISPLAY=0xC7; delay(); RS=1; DISPLAY=h_ref/100+48; delay(); DISPLAY=(h_ref%100)/10+48; delay(); DISPLAY=(h_ref%100)%10+48; delay(); DISPLAY=' '; delay(); DISPLAY=' '; delay(); /* Lê teclado a atualiza variáveis globais (parâmetros do processo /* tecla=teclado(); switch(tecla){ case '1': if(Kc<=0.989) Kc+=0.01; break; case '4': if(Kc>=0.01) Kc-=0.01; break; case '2': if(Ti<=9.989) Ti+=0.01; break; case '5': if(Ti>=0.02) Ti-=0.01; break; case '3': if(Td<=9.989) Td+=0.01; break; case '6': if(Td>=0.01) Td-=0.01; break; case '8': if(h_ref<=390) h_ref+=10; break; case '0': if(h_ref>=60) h_ref-=10; break; } }while((tecla!='9') && (tecla!='#'));}.../************************************************************************************ROTINA DE CONTROLE****INTERRUPÇÃO**********************************************************************************/void cont1(void) interrupt 3 { SCONV=1; //Ativa uma conversão simples pelo bit SCONV while(!ADCI); //Espera pelo flag de fim de conversão ADCI=0; //reset no flag de fim de conversão leitura = ADCDATAH*256 + ADCDATAL; //armazena o valor lido pelo AD leitura = leitura>>4; //converte a leitura de 12 para 8 bits h_real = 620-(*(sensor+leitura)); //converte a leitura do AD para milimetros erro0 = h_ref - h_real; //calcula erro switch(controle){ case '1': //PID no formato de velocidade u0 = u1 + Kc*((erro0-erro1) + (Ts/Ti)*erro0 + (Td/Ts)*(erro0-2*erro1+erro2)); if (u0>99.99) u0=99.99; if (u0<0) u0=0; u1=u0; //passa os valores para amostras em atraso erro2=erro1; erro1=erro0; break; case '2': //PD u0 = nominal + Kc*(erro0 + (Td/Ts)*(erro0-erro1)); if (u0>99.99) u0=99.99; if (u0<0) u0=0; erro1=erro0; //passa o valor para amostra em atraso } PWM0L=(int)(180-u0*1.8); //muda a escala da para um valor reconhecivel pelo PWM PWM0H=0; //Atualiza o duty do PWM if(contador<10) contador++; //sinaliza para apresentar o erro e duty no display if(amostra<255) { *(altura+amostra)=h_real; //grava a altura real num vetor *(duty_saida+amostra)=(int)(u0*10); //grava o sinal de controle num vetor amostra++; }} O código anteior (parte dele) foi incorporado no kit "Processo da Bola no Tubo":
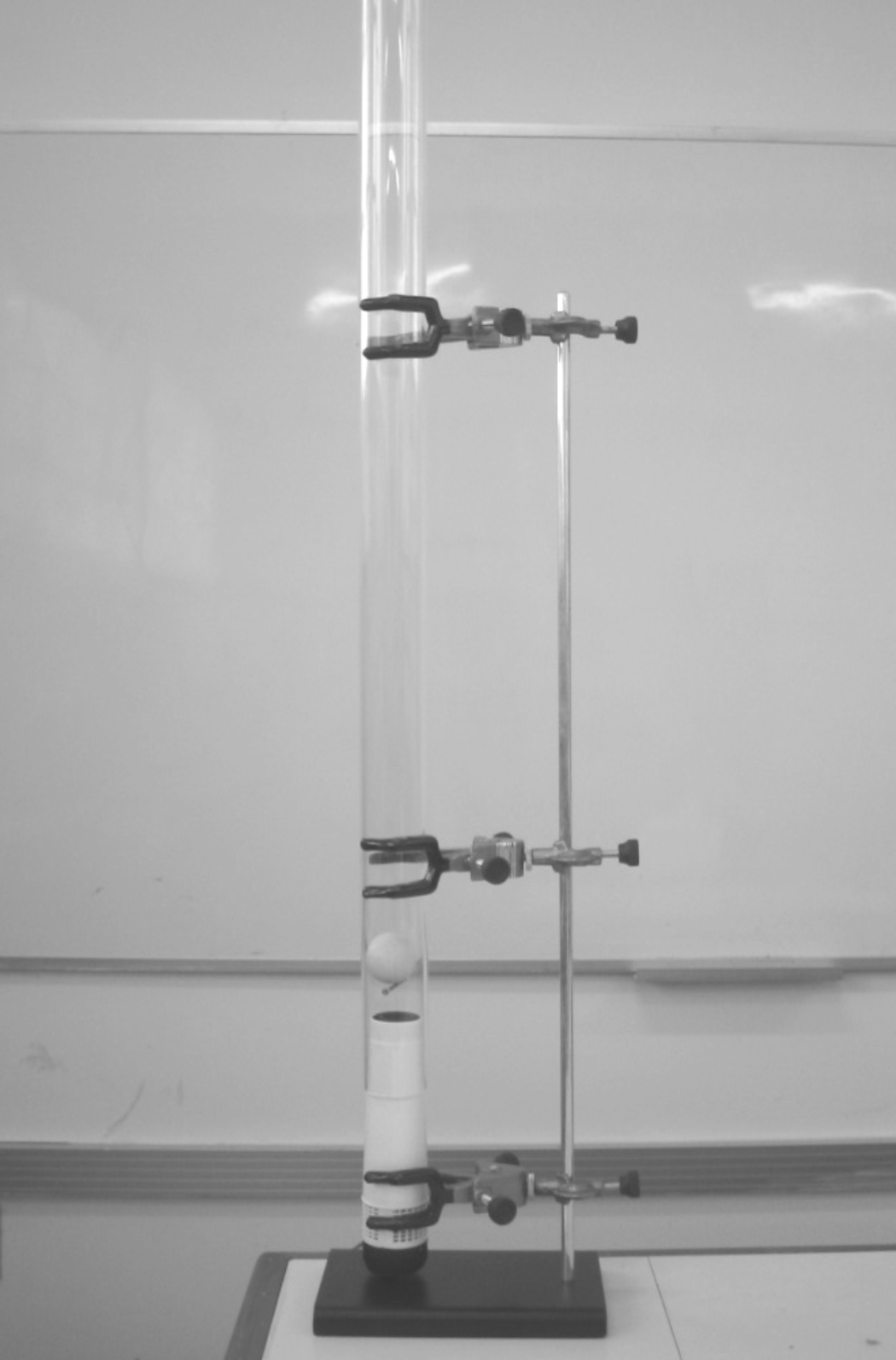
Este processo consiste em definir uma altura desejada para a bola dentro de um tubo (referência), cuja altura é mantida pelo "colchão de ar" criado por um ventilador localizado na base inferior do tubo. O controle desse ventilador acaba definindo a altura alcançada pela bola dentro do tubo.
A interface com o usuário é mostrada na figura abaixo:

Note que existem teclas reservadas para alteração de alguns parâmetros com o algoritmo de controle sendo executado:
- : tecla 1;
- : tecla 4;
- : tecla 2;
- : tecla 5;
- : tecla 3;
- : tecla 6;
- Altura da bola, : tecla 8;
- Altura da bola, : tecla 0;
- Teclas
*ou#interrompdia processo.
A próxima figura mostra como ficava o display com o algoritmo de controle sendo executado:
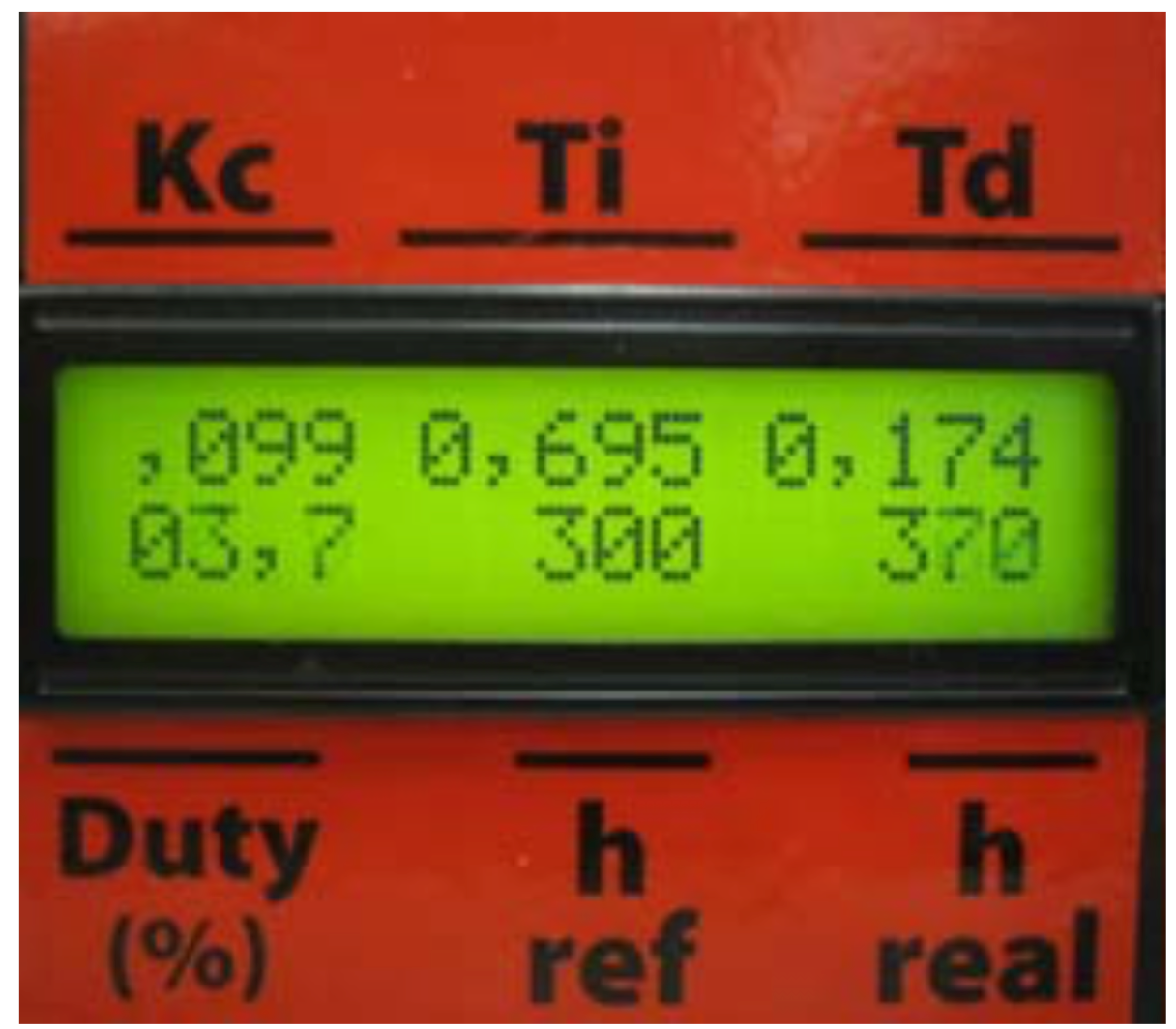
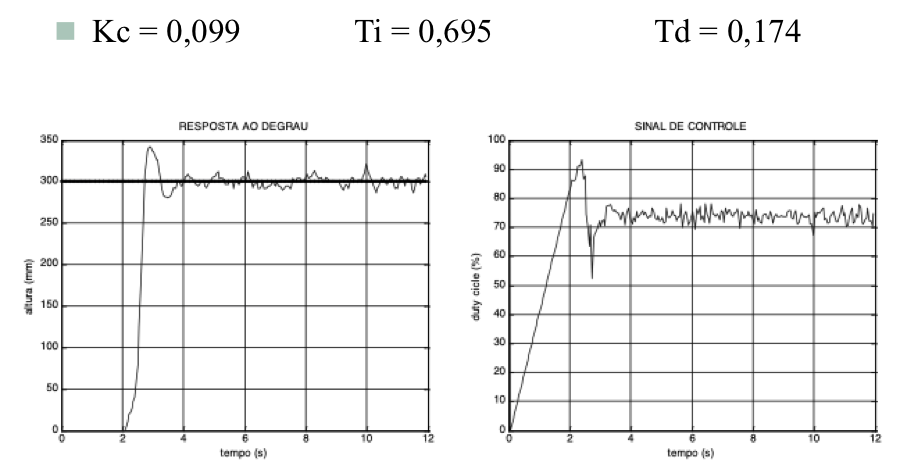
Este processo permitia alterar seu algoritmo de controle via upload de novo firmware mas já trazia implementado e sintonizado um controlador PID no formato de velocidade:
corresponde ao perído de amostragem, que foi de 47 milisegundos.
Este controlador sintonizando usando Ziegler-Nichols permitiu alcançar os seguintes resultados:
Referência Bibliográfica:
Robinson Caldart Vanz, Controlador digital para processo bola e tubo, TCC Eng Elétrica (UPF), Orientador: Fernando Passold, 114 pp., 2006.