Usando APP Control System Designer
Intro
Reparar que no Matlab version
Suponha que você já carregou ou têm disponível um conjunto de plantas para realizar tesets ou projetar controladores usando este APP:
>> load testes_trabalhoII_2018_2.mat
```matlab
No caso, já estão disponíveis algumas variáveis:
```matlab
>> who
Your variables are:
FTMF_teste OS polosMF teste5 teste8b
FTMF_teste8 T teste teste5b u_teste
FTMF_teste8b ans teste2 teste6 u_teste8b
K_teste aux teste3 teste7 zeta
K_teste8 erro teste4 teste8
>>
Suponha que vamos trabalhar com a planta "teste":
>> zpk(teste)
ans =
0.020833 (z-0.2) (z+0.1)
------------------------
(z-0.9) (z-0.7) (z-0.4)
Sample time: 0.1 seconds
Discrete-time zero/pole/gain model.
>>
Notamos que esta planta possui pólos em:
>> pole(teste)
ans =
0.9000
0.7000
0.4000
>> % e possui zeros em:
>> zero(teste)
ans =
0.2000
-0.1000
>>
e possui um ganho DC em Malha-aberta aproximadamente igual à 1:
>> dcgain(teste)
ans = 1.0185
>>
Para carregar esta planta no APP devemos fazer;
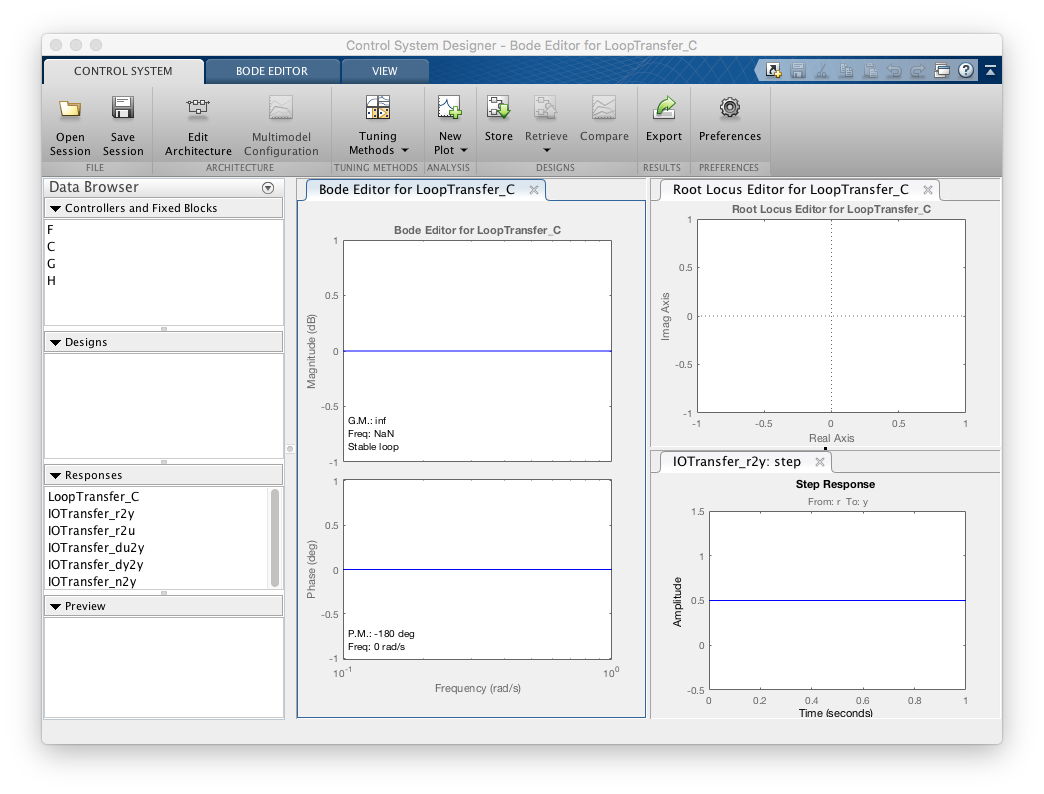
- Executar o APP: deve-se abrir uma janela como:
Importando dados já existentes:
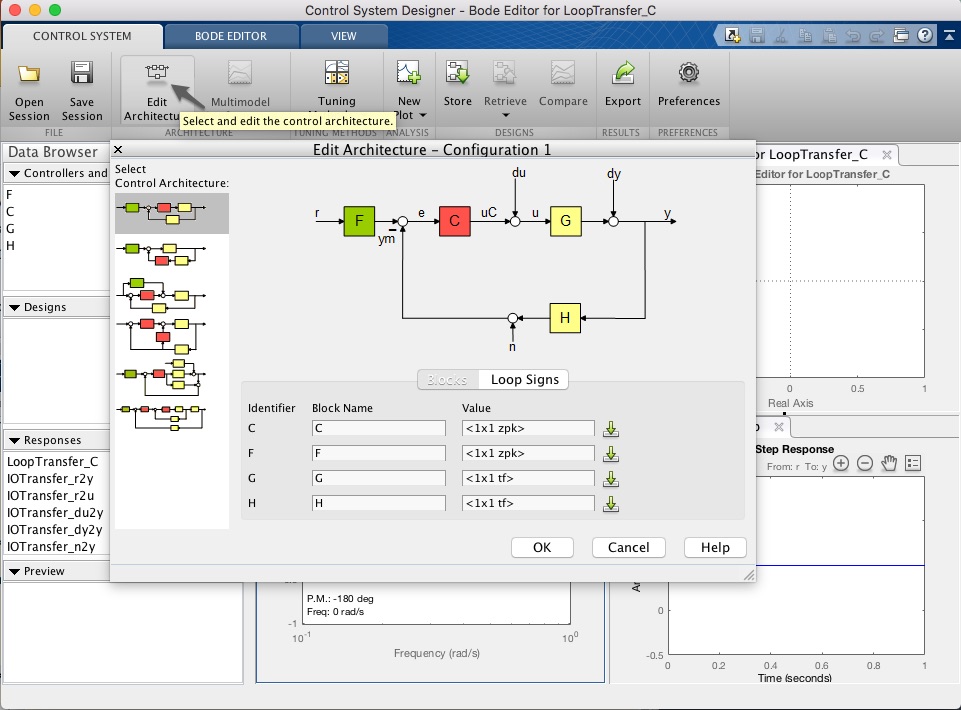
- Selecionar a opção Edit Architecture: deve-se abrir uma janela como:
- Nesta nova janela, manter selecionado o primeiro modelo de arquitetura (como mostrado da figura anterior) e despois localizar o campo G (plant), e completar com o nome da variável que contenha a tranfer funcion desejada, no caso teste:
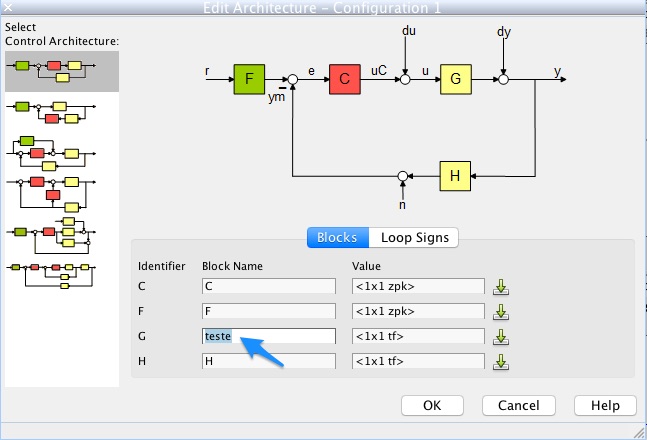
Ou clicar na parte referente à G no botão com a seta para baixo. Deve-se abrir uma outra janela para importação de dados à partir do Workspace, neste caso, selecionar a tf teste -- ver próxima figura:
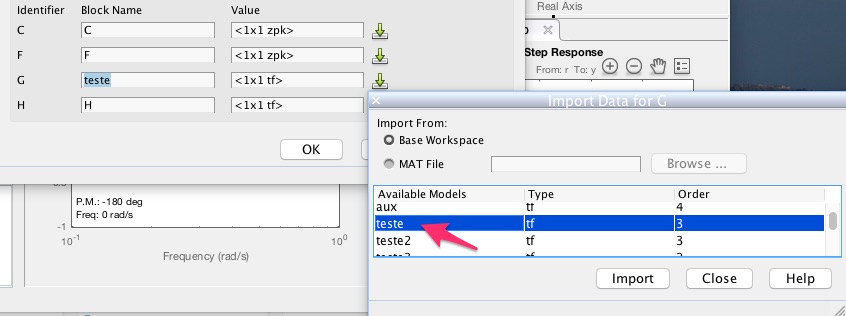
Uma vez selecionada a tf desejada, ciclar no botão Import. E voltando à janela anterior (janela da "Edit Architecture _ Configuration 1"), clicar sobre o botão "Ok". Se tudo deu certo, a janela "Control System Designer - Bode.." deve ter se modificado para:
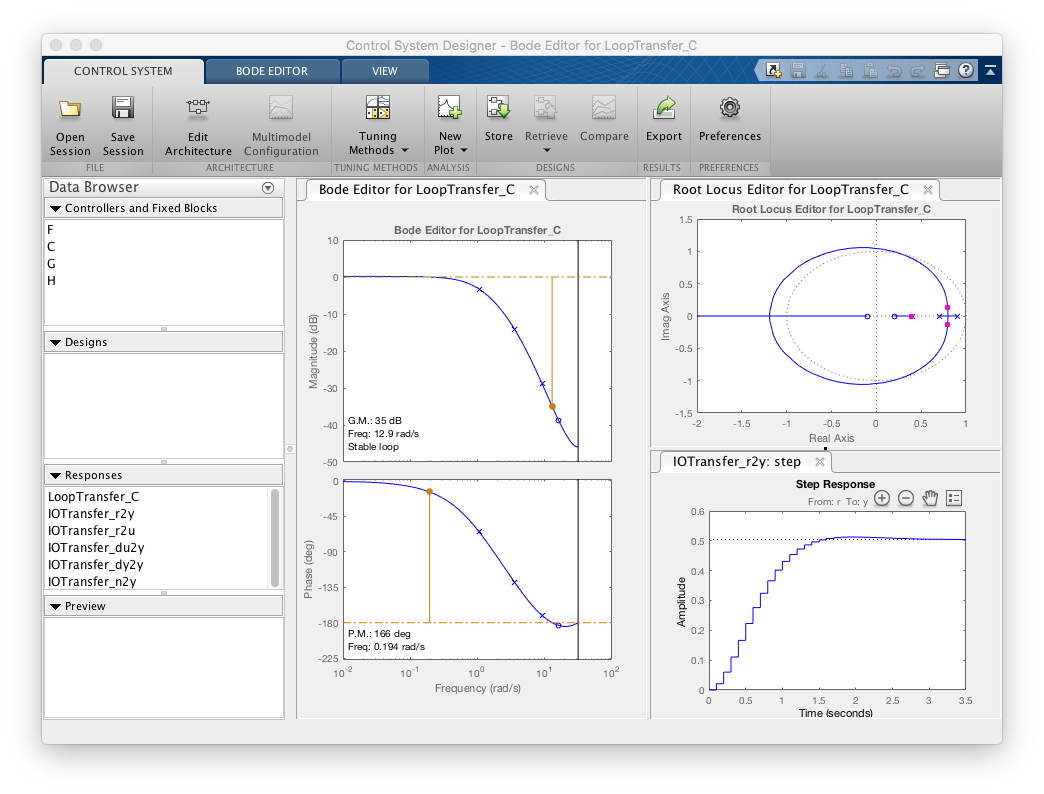
Note que o diagrama do Lugar das Raízes (RL) foi atualizado.
Customizando a interface:
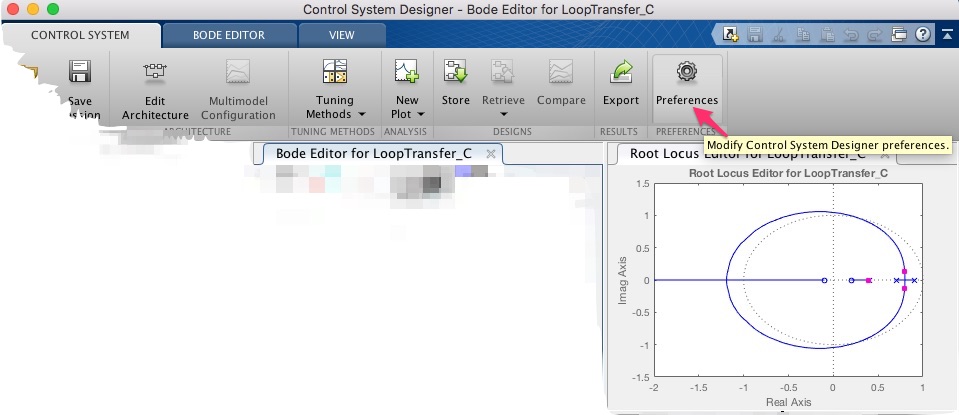
- O detalhe é que este APP está preferencialmente ajustado para realizar projetos usando a ferramenta de Diagramas de Bode. No nosso em caso em particular, vamos preferir usar a ferramenta RL. Para tanto, teremos que modificar as preferências, clicando na opção Preferences:
Uma nova janela se abre:
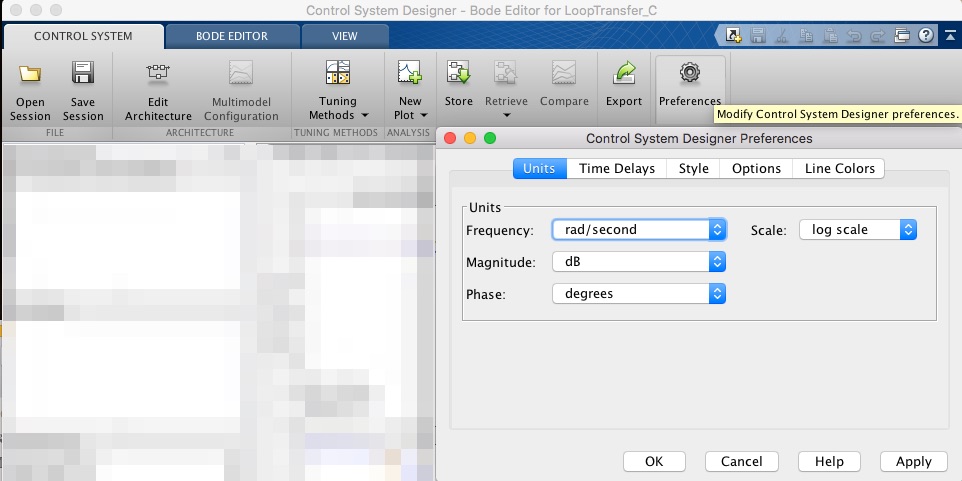
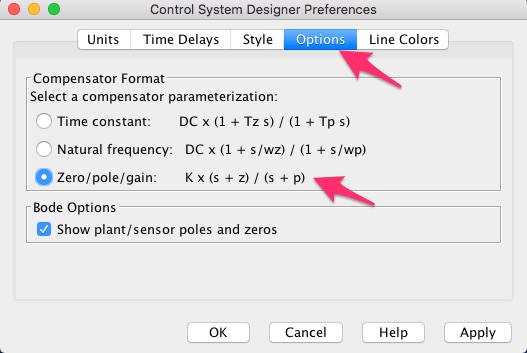
Nesta janela, selecionar a aba Options e mudar o Compensator Format do valor inicial Time Constant para Zero/pole/gain. Clicar depois no botão "Apply":
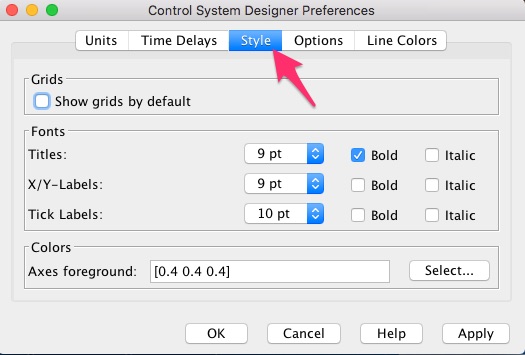
Você pode aproveitar também e modificar outras preferências associadas com o tamanho das fontes usadas originalmente nos gráficos mostrados no Control System Designer. Originalmente:
Poderia ser modificado para:
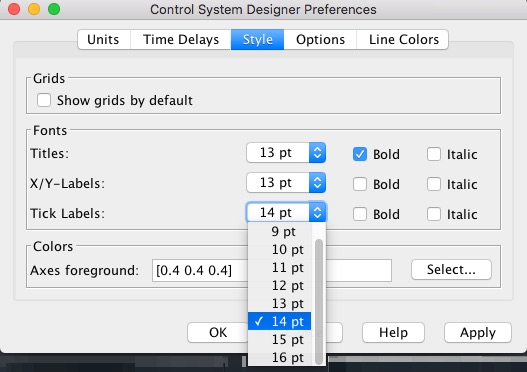
Obs.: Não esquecer de clicar em "Apply" ao final.
Confirmando projeto usando Root Locus:
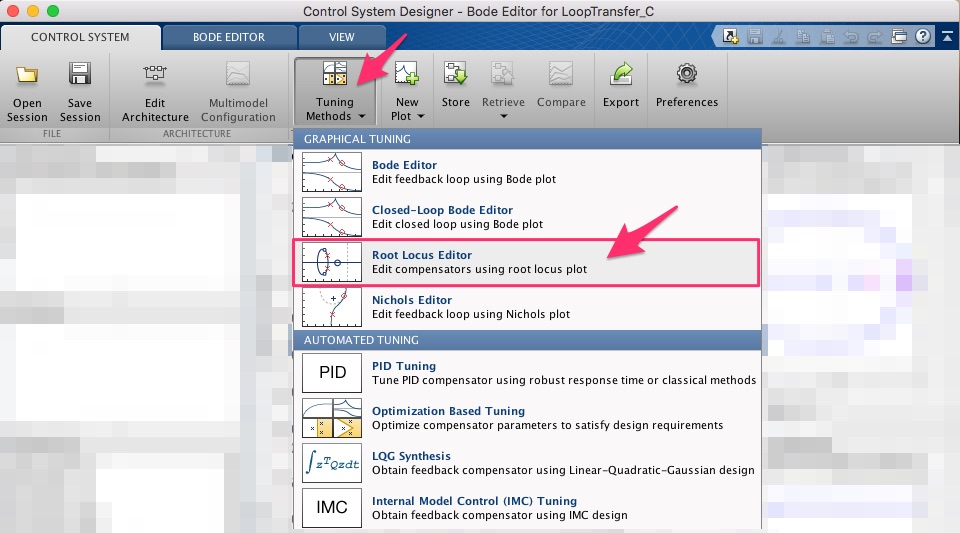
- A seguir, modificamos a forma com vamos projetar o controlador, no nosso caso, usando a ferramenta de RL. Para tanto, localizar a opção "Tuning_Methods" e mudar para: "Root Locus Editor":
Uma nova janela se abre:
Simplemente cliclar em "Plot".
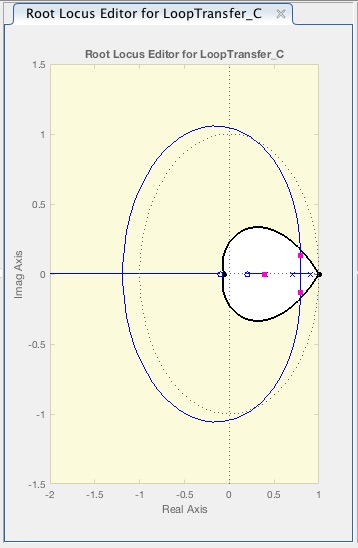
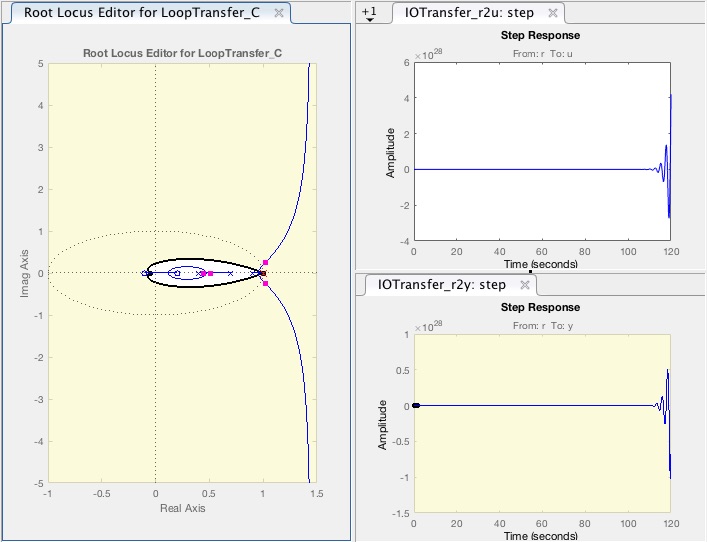
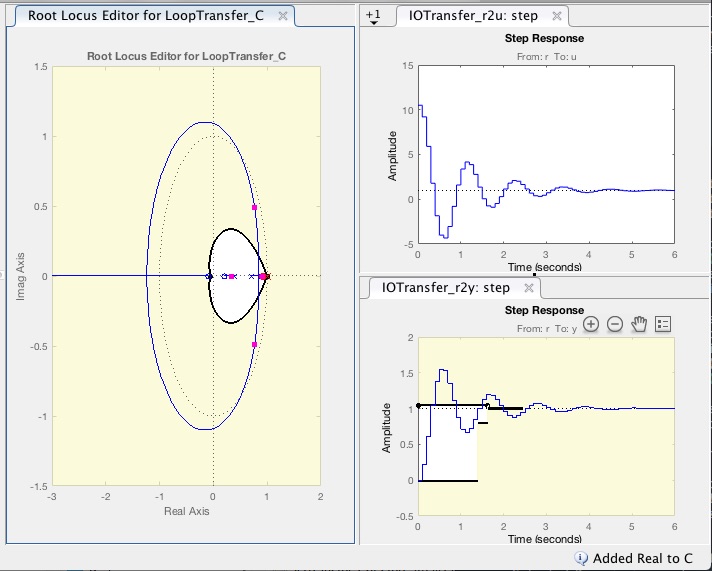
Notar então que a última janela se fecha e que o quadro que antes continha diagramas de Bode foi substituído por "Root Locus Editor or Loop Transfer C":
![]()
Acrescentando/Modificando Janelas com Gráficos:
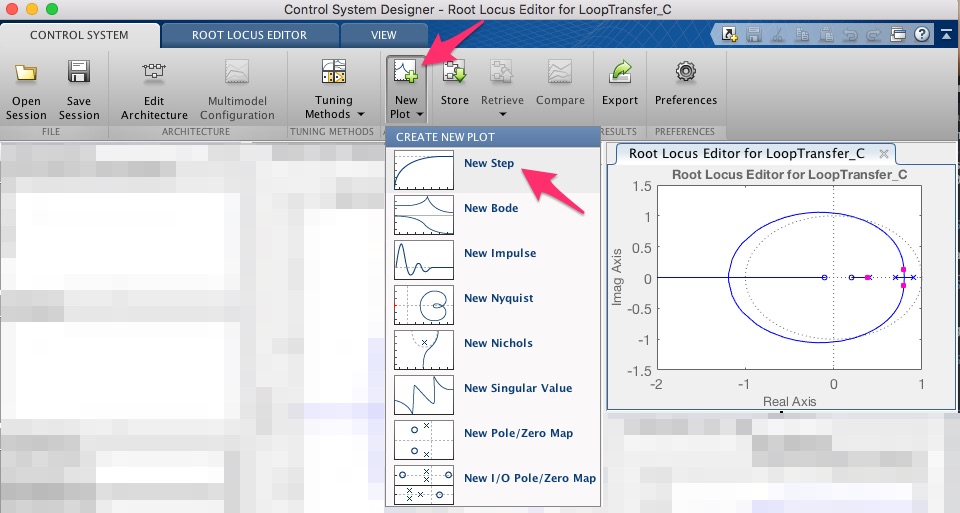
- Podemos ainda modificar/acrescentar um novo gráfico de resposta, selecionando o quadro que queremos modificar no APP. No caso, suponha que queremos modificar o quadro Root Locus Editor for LoopTransfer_C (canto direito superior) para um gráfico que mostre as amplitudes desenvolvidas pela ação de controle. Para tanto, primeiramente selecionamos este quadro (clicar sobre ele para atrair o foco para este quadro):
![]()
Uma vez tendo selecionado este quadro, clicar em New Plot e a seguir selecionar New Step:
Na nova janela que se abre, selecione agora IOTransfer_r2u:
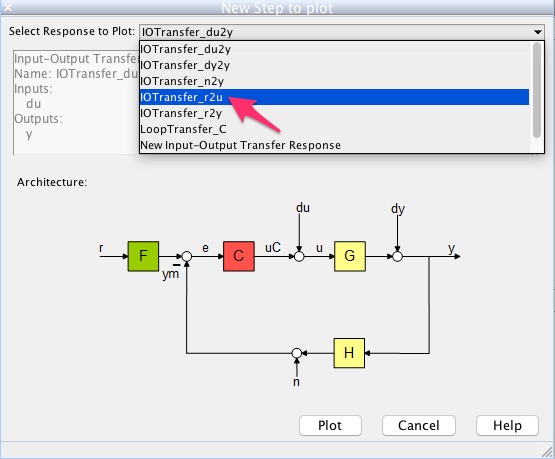
Não se esqueça de clicar em "Plot" para efetivar a seleção e fechar esta janela.
Adicionando Design Requirements
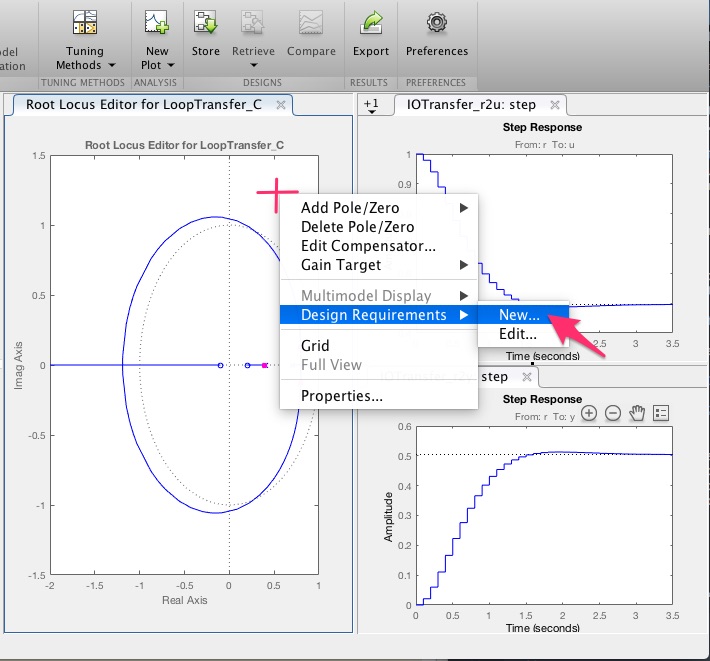
- Agora estamos quase prontos para iniciar o projeto do nosso controlador. Mas antes, seria interessante incorporar no gráfico do RL, ao menos a linha guia com fator de amortecimento desejável (requisitos para nosso controlador). Para tanto, clicar com o botão direito do mouse sobre o quadro do RL. selecionar Design Requirements e New:
Na nova janela que se abre, clicar em Percent overshoot:
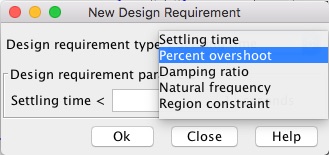
E informar o novo valor desejado para Percent overshoot (no caso: 5%):
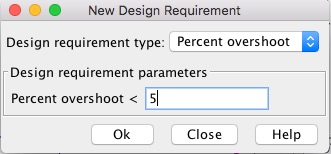
Clicar sobre o botão "Ok" para fechar esta janela.
Note que o RL (quadro do RL) se modifica para:
Notar que outros requerimentos podem ser informados. Por exemplo, **no quadro IOTransfer_r2y:step ** podemos informar os requerimentos de overshoot e tempo de asentamento desejáveis. Neste caso, repetir um procedimento igual ao adotado anteriormente, mas neste caso, com **foco no quadro IOTransfer_r2y:step **:
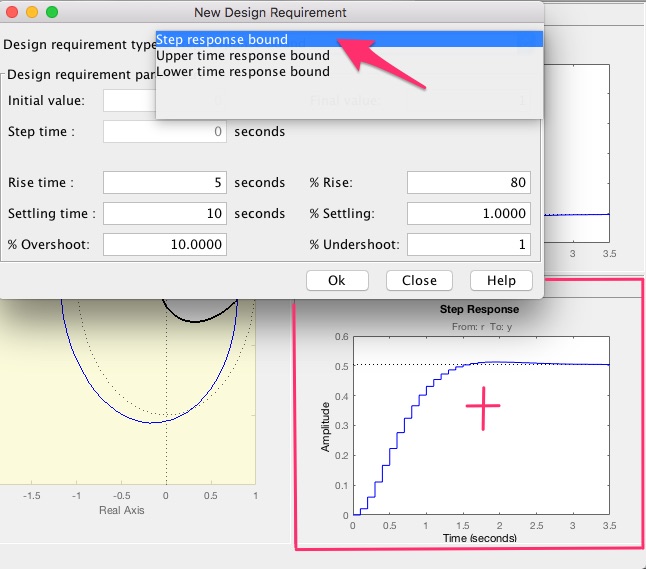
No caso, estes valores foram ajustados para:
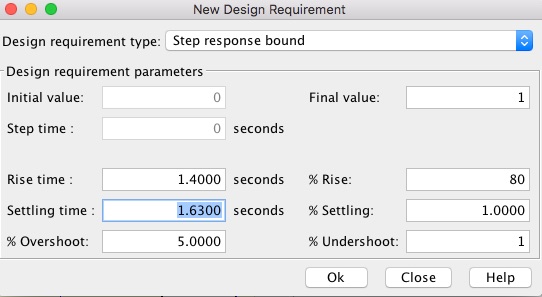
Naturalmente, não esquecer de clicar no botão "Ok" ao final. Notar que o quadro IOTransfer_r2y:step é agora atualizado para:
![]()
Obs.1: Reparar que o MATLAB não deixa que o valor informado no campo Settling time seja menor que o valor informado no campo Rise Time. Obs.2: Notar que no nosso caso, no WorkSpace já há as variáveis zeta e OS:
>> zeta
zeta = 0.5912
>> OS
OS = 10
Editando o Controlador:
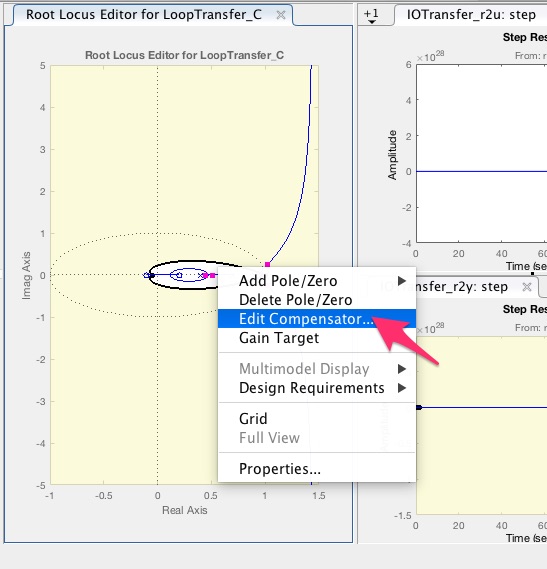
- Até o momento, nosso "controlador" é simplesmente proporcional com ganho unitário. A idéia é acrescentar pólos e zeros ao mesmo. Suponha que queremos realizar um PI+Zero. Para tanto, atraímos o foco do MATLAB para o **quadro Root Locus Editor for LoopTransfer_C ** e clicamos com o botão direito do mouse sobre ele (reparar que deve ser dentro da região de interesse, área branca):
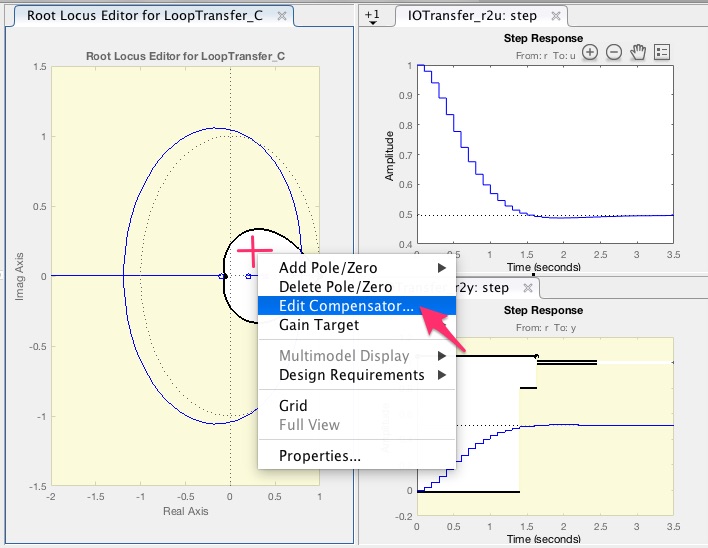
Selecionar na janela que se abre, a opção Edit Compensator e então:
Ou pode ser mais fácil, acrescentar de cara um integrador: botão direito do mouse sobre o RL e selecionar Add Pole/Zero >> Integrator:
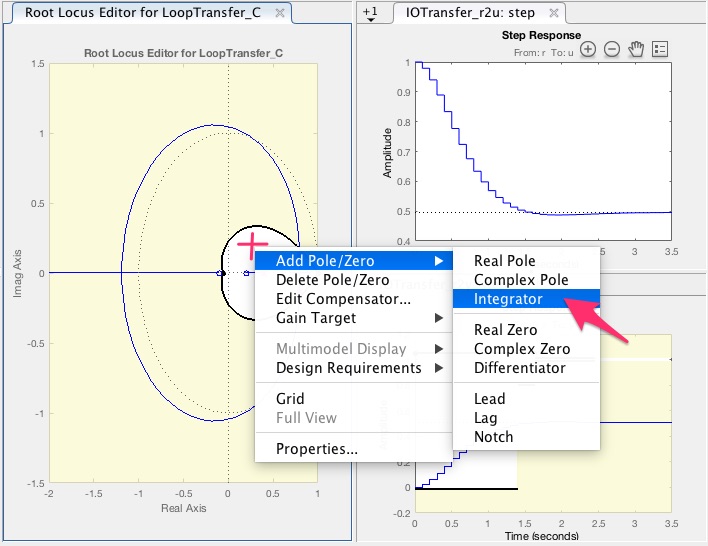
Notar que o RL e outros gráficos já se modificam retratanto o impacto causado pela introdução de um integrador (pólo em z=1) ao RL anterior:
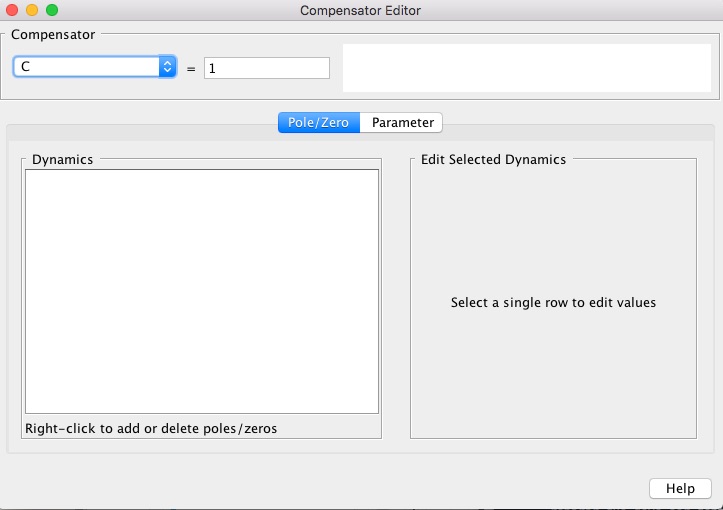
Mas faltou acrescentar o zero do controlador. Para tanto, clicar novamente com o botão direito do mouse sobre o quadro do RL e selecinar Edit Compensator:
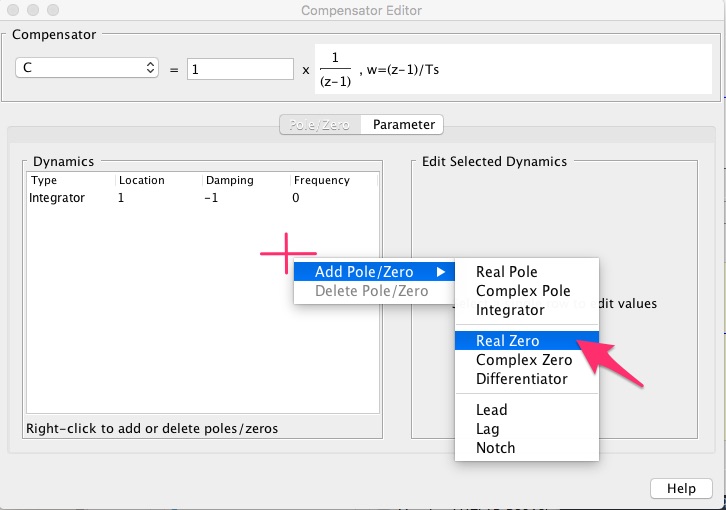
Na nova janela que se abre, clique com o botão direito do mouse sobre o quadro Dynamics, selecione Add Pole/Zero e depois Real Zero:
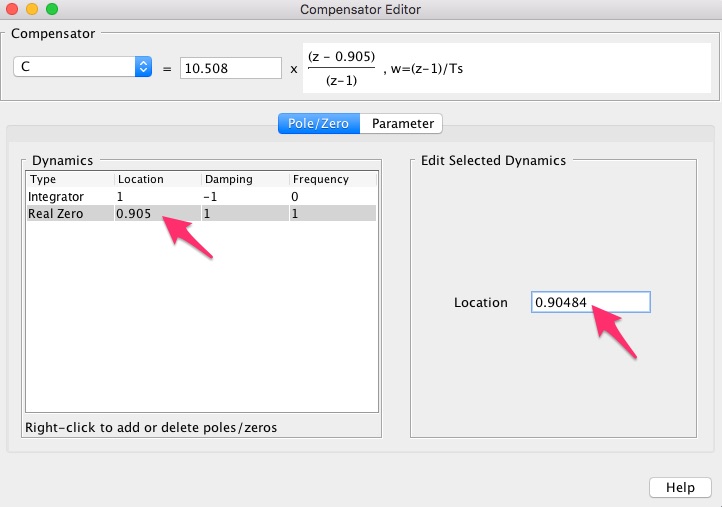
Note o MATLAB vai sugerir um valor (no caso: 0.905), mas este pode ser facilmente modificado clicando sobre a linha do Real Zero (no quadro Dynamics) e depois na caixa ao lado Edit Selected Dynamics, o valor pode ser facilmente editado:
Se percebe que novamento o gráfico do RL e das respostas ao degrau foram atualizados:
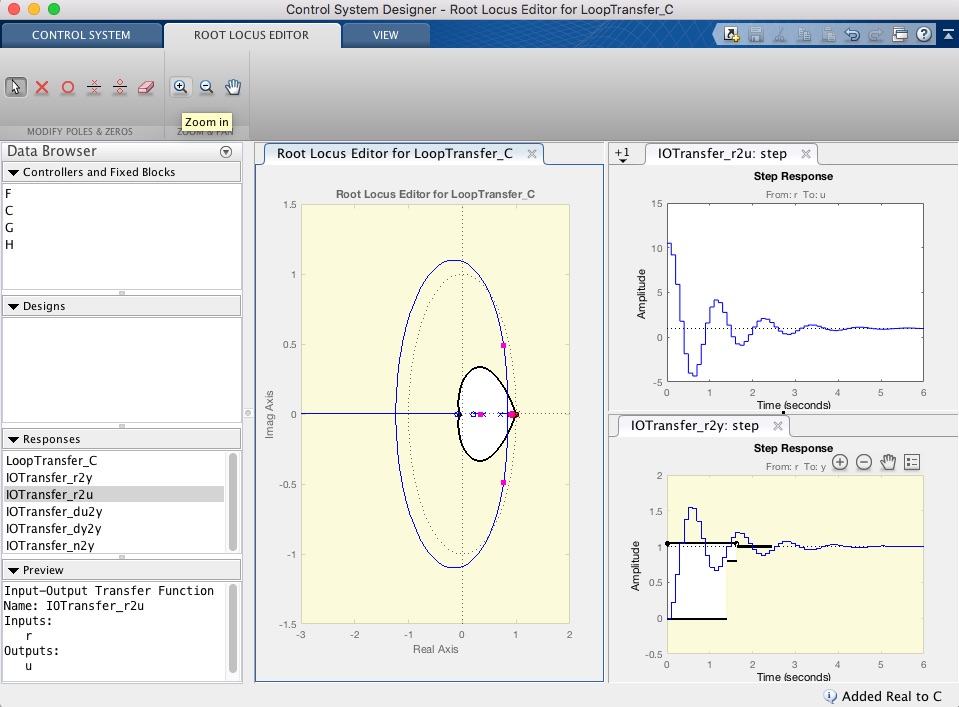
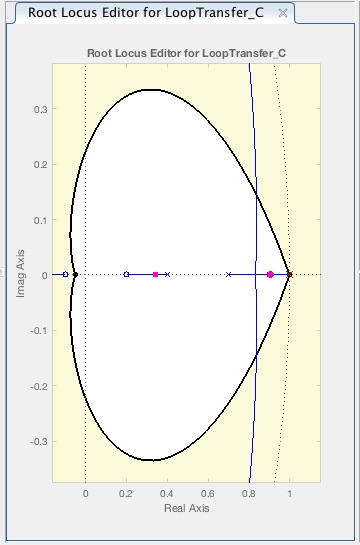
Mas eventualmente a resolução dos gráficos pode não ser a desejável para permitir visualizações ou manipulações. Para tanto, você pode clicar na aba superior do Control System Designer, chamada ROOT LOCUS EDITOR (justamente a que ativamos antes) e então a janela do APP se modifica um pouco para:
Um "Zoom" sobre o gráfico anterior resulta em:
Lembrando os dados da planta:
>> zpk(teste)
ans =
0.020833 (z-0.2) (z+0.1)
------------------------
(z-0.9) (z-0.7) (z-0.4)
Sample time: 0.1 seconds
Discrete-time zero/pole/gain model.
>>
E "lembrando" da equação do nosso controlador, clicando na janela do Control System Designer, no quadro Controllers and Fixed Blocks (canto superior esquerdo), clicamos em "C" (Controller) e então percebemos que no quadro Preview aparecem os dados do contolador:
Name: C
Sample Time: 0.1
Value:
10.508 (z-0.9048)
-----------------
(z-1)
Sintonizando Interativamente o Controlador:
Notar que o valor do ganho do controlador pode ser modificado no RL (tentar mover o pólo de MF indicado no RL como um marcador magenta quadrado -- sim, eventualmente ele pode ser difícil de ser distinguido de dentro do RL) ou abrindo a janela de edição do controlador (botão direito do mouse sobre o RL selecionando Edit Compensator):
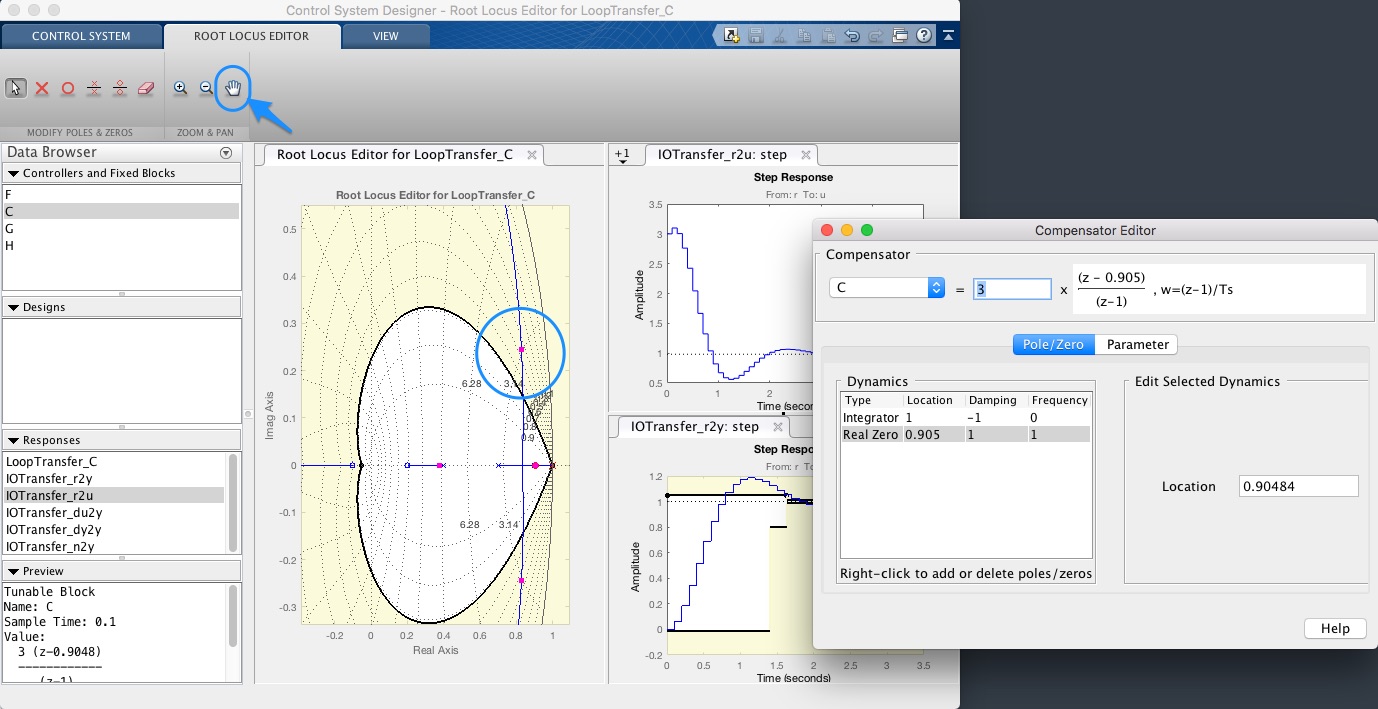
E então aqui aparece a parte mais interessante e interativa deste APP: a ferramenta da "mão" (Pan) na aba ROOT LOCUS EDITOR permite editar a posição de pólos de MF e vizualizar interativamente, seu efeito sobre o sistema em malha fechada:
Vídeo no Youtube):

(Arquivo fonte original: uso_control_system_designer.mp4, 960 x 734, H.264, 00:23, 2.1 Mbytes.)
Aponte o celular para o QR-Code abaixo para visualizar o video:

Prof. Fernando Passold, em 08 Oct 2018.