Data: 07/10/2020
Chaveando para diretório de trabalho e ativando "Diary":
>> pwd
ans =
'/Volumes/Data/Users/fernandopassold/Documents/UPF/Controle_2/6_Projetos_via_RL/2020_2'
>> diary aula_07_10_2020.md
>> % # Aula do dia 07/10/2020A planta usada para estudo de caso é:
\[ G(s)=\dfrac{1}{(s+10)(s+2)(s+1)} \]
Ingressando plata no Matlab:
>> G=tf( 1, poly( [ -10 -2 -1] ) );
>> zpk(G)
ans =
1
------------------
(s+10) (s+2) (s+1)
Continuous-time zero/pole/gain model.
>> T=0.1; % periodo de amostragm adotado
>>
>> % "Digitalando" a planta, isto é, calculando $BoG(z)$:
>>
>> BoG = c2d ( G, T );
>> zpk(BoG)
ans =
0.00012224 (z+2.747) (z+0.1903)
--------------------------------
(z-0.9048) (z-0.8187) (z-0.3679)
Sample time: 0.1 seconds
Discrete-time zero/pole/gain model.
>>Requisito de controle: \(\%OS \le 5\%\):
>> OS=5; % percentual tolerado de overshoot
>>
>> zeta = (-log(OS/100))/(sqrt(pi^2 + (log(OS/100)^2)))
zeta =
0.6901
>>
>> % Exibir o Root Locus
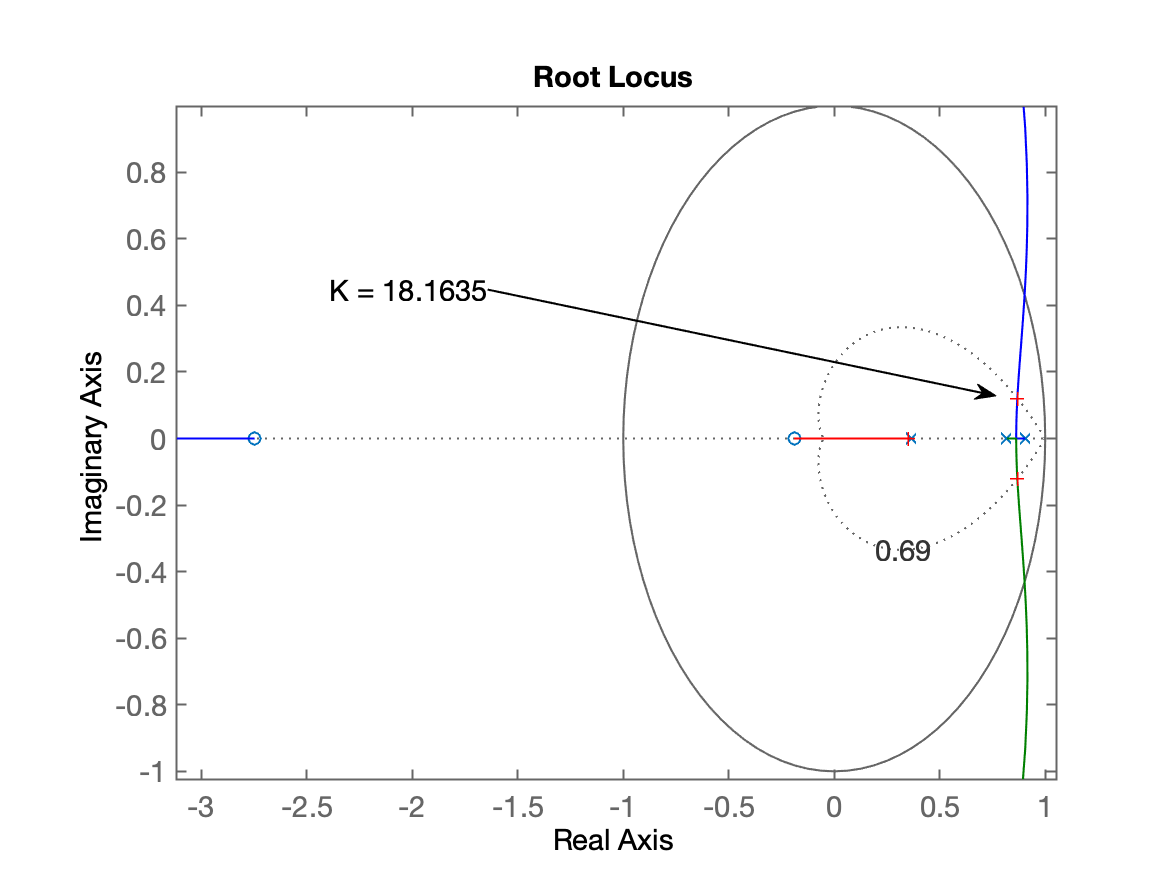
>> rlocus(BoG)
>> hold on
>> zgrid(zeta, 0)
>> [K, polos_MF] = rlocfind( BoG )
Select a point in the graphics window
selected_point =
0.8676 + 0.1214i
K =
18.1635
polos_MF =
0.8680 + 0.1214i
0.8680 - 0.1214i
0.3533 + 0.0000i
>>Gráfico de Root Locus para controlador Proporcional:
Fechando a malha...
>> ftmf = feedback( K*BoG, 1);
>> figure; step(ftmf)
>> gridGráfico da resposta ao degrau unitário:

Computando \(y[\infty]\) e errro:
>> dcgain(ftmf) % deduzindo y[\infty]
ans =
0.4759
>> erro= (1 - dcgain(ftmf))/1*100
erro =
52.4061
>> Pode-se reduzir o erro aumentando ganho, mas aumenta overshoot...
>> K2=100; % novo valor do ganho do controlador proporcional
>>
>> ftmf2 = feedback( K2*BoG, 1);
>> pole(ftmf2)
ans =
0.8860 + 0.2854i
0.8860 - 0.2854i
0.3071 + 0.0000i
>>
>> figure; step(ftmf2)Resposta ao degrau com \(K=100\):
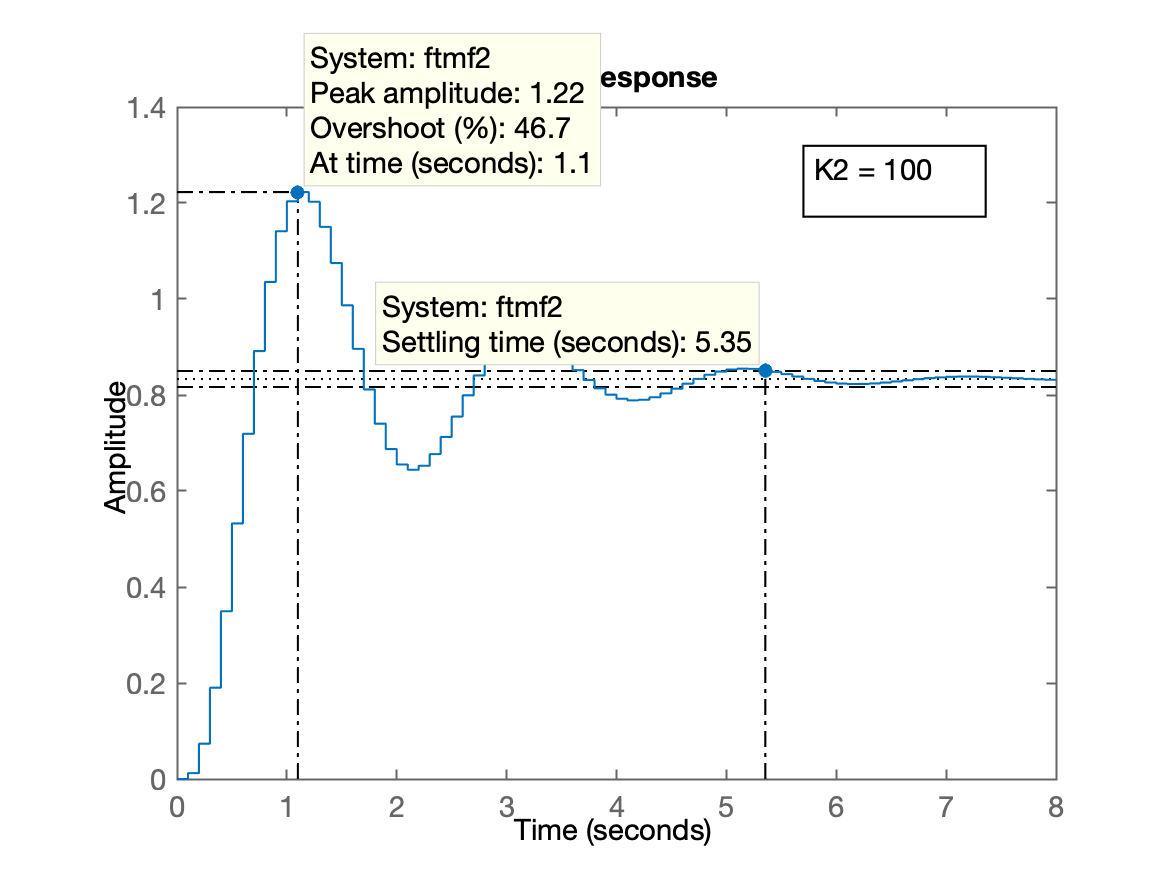
Calculando o novo valor de erro:
>> erro2= (1 - dcgain(ftmf2))/1*100
erro2 =
16.6667Lembrando eq. do Integrador Retangular (vista em "Teoria do Erro"): \[ C(z)=\dfrac{K_i \cdot T}{(z-1)} \]
Ingressando controlador no Matlab e determinando \(FTMA(s)\):
>> I = tf( 1, [1 -1], T);
>> zpk(I)
ans =
1
-----
(z-1)
Sample time: 0.1 seconds
Discrete-time zero/pole/gain model.
>> ftma_I = I*BoG;
>> zpk(ftma_I)
ans =
0.00012224 (z+2.747) (z+0.1903)
--------------------------------------
(z-1) (z-0.9048) (z-0.8187) (z-0.3679)
Sample time: 0.1 seconds
Discrete-time zero/pole/gain model.
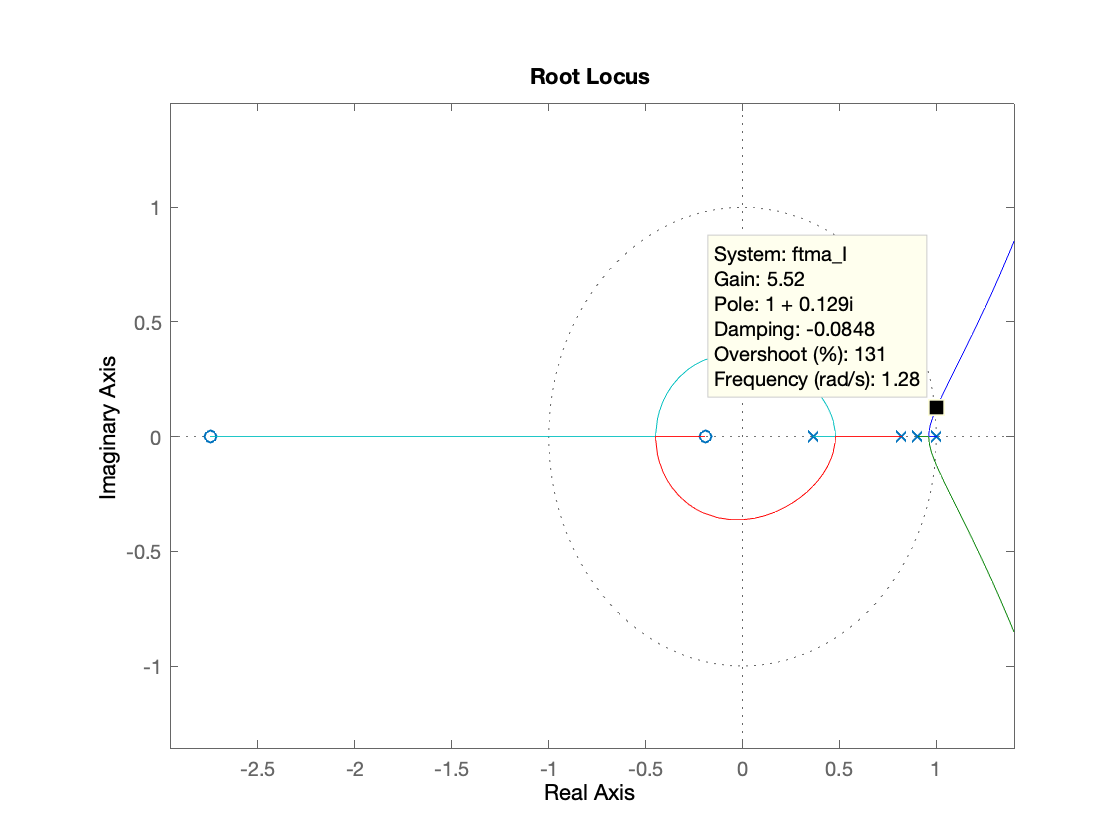
>> % Deduzindo Root Locus
>>
>> figure; rlocus(ftma_I)
>> axis equalGráfico do RL sem zoom:
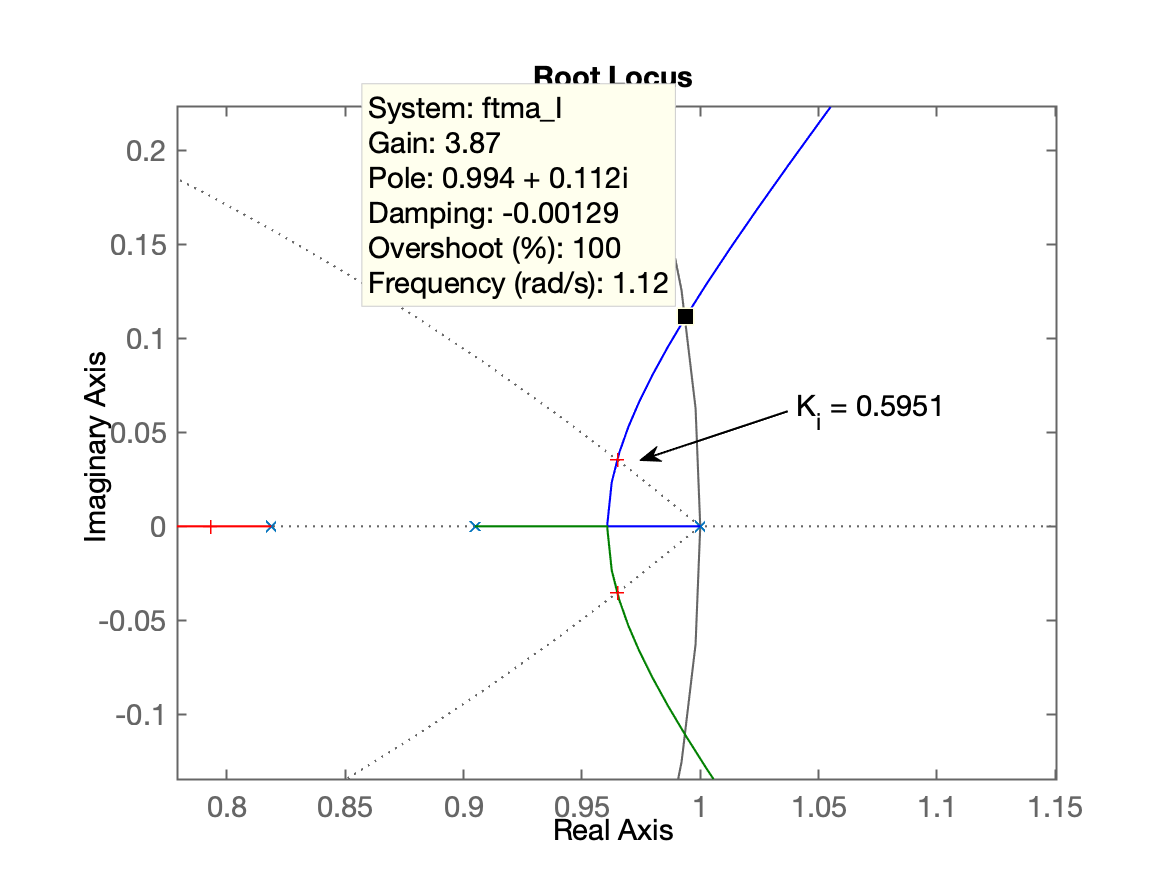
Realizando zoom para sintonia do controlador Integrador Puro:
>> hold on;
>> zgrid(zeta, 0)
>> [Ki, polos_MF] = rlocfind (ftma_I)
Select a point in the graphics window
selected_point =
0.9644 + 0.0354i
Ki =
0.5951
polos_MF =
0.9649 + 0.0353i
0.9649 - 0.0353i
0.7930 + 0.0000i
0.3687 + 0.0000i
>> Gráfico final do RL (com zoom):
Fechando a malha:
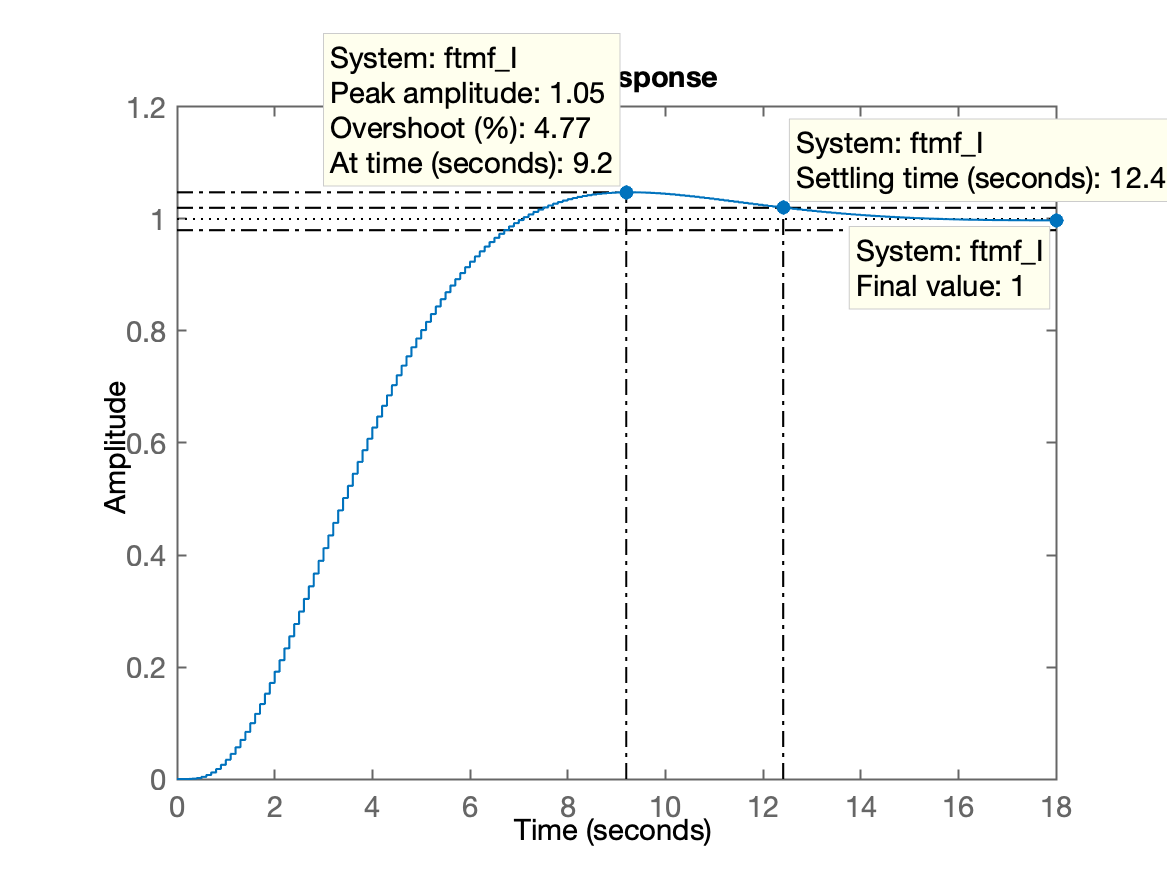
>> ftmf_I = feedback( Ki*ftma_I, 1);
>> figure; step(ftmf_I)
>>
>> % Valor final de $y[kT]$:
>>
>> dcgain(ftmf_I)
ans =
1.0000
>>Gráfico da resposta ao degrau unitário:
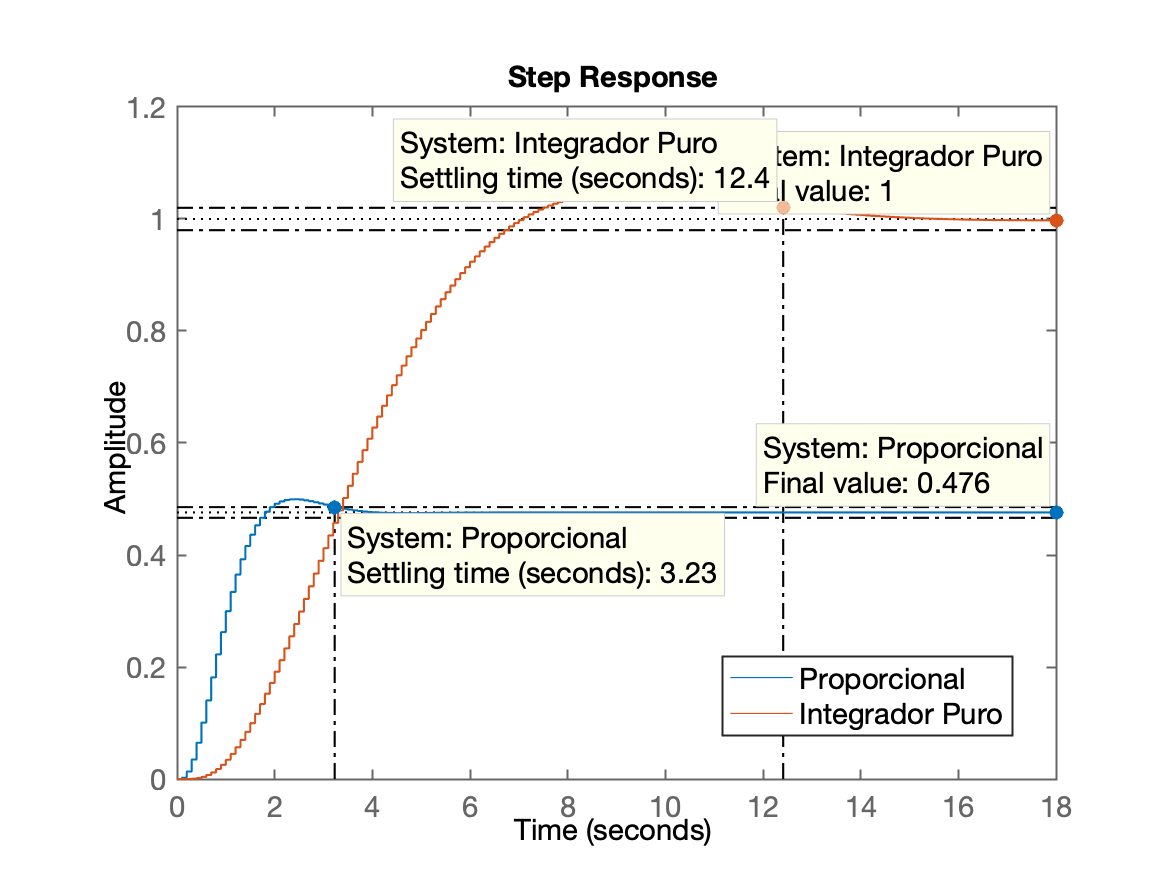
>> figure; step( ftmf, ftmf_I)
>>Gráfico:
Encerrando trabalhos com Matlab e preservando dados para próximas aulas e próximos projetos:
>> save planta
>> diary off
>> quitObs.: figuras incluídas usando:
<img src="step_Kp_I.png" alt="step_Kp_I.png" style="zoom:50%;" />Fernando Passold, em 07.10.2020