 Photo by Tim Marshall on Unsplash
Photo by Tim Marshall on Unsplash
Photo by Tim Marshall on Unsplash
Aula originalmente administrada em 08/10/2019.
Vamos verificas as amplitudes desenvolvidas pelas ações de controle, principalmente com Ação Derivativa (ou Lead).
Recuperando dados de aula passada:
>> diary aula_08_out_2019.md % gerando arquivo de registro desta aula
>> clear all % limpando todas as variáveis
>> close all % fechando todas as janelas gráficos
>> what % listando arquivos compatíveis com Matlab
MATLAB Code files in the current folder /Users/fernandopassold/Documents/UPF/Controle_Auto_3/6_Controle_Digital
angulos2 arc createfigure
MAT-files in the current folder /Users/fernandopassold/Documents/UPF/Controle_Auto_3/6_Controle_Digital
controlador2 planta_instavel_ex_1
controlador_dead_beat_1
planta
MDL-files in the current folder /Users/fernandopassold/Documents/UPF/Controle_Auto_3/6_Controle_Digital
controlador_tempo_minimo dead_beat_example_2_NPTEL
controlador_tempo_minimo2 planta_instavel_exemplo_1
controle_tempo_minimo_1
dead_beat_2
SLX-files in the current folder /Users/fernandopassold/Documents/UPF/Controle_Auto_3/6_Controle_Digital
controlador_dead_beat_3_6_2_example_2
controlador_dead_beat_3_6_2_example_2_with_saturation
planta_2a_ordem_cancela_imperf
planta_2a_ordem_cancela_imperf2
>> load planta % recuperando dados da última aula
>> zpk(C_Lead) % verificando equação do Lead:
ans =
(z-0.7541)
----------
(z-0.15)
Sample time: 0.1 seconds
Discrete-time zero/pole/gain model.
>> K_Lead
K_Lead =
244.4570
>>Podemos forçar
o Matlab à gerar um gráfico de \(u[kT]\) para uma referência de entrada degrau. Para tanto, lembramos que:
\[ U(z) = \underbrace{ \left[ \dfrac{C(z)}{1+C(z) \cdot BoG(z)} \right] }_{\text{‘aux’}} \cdot R(z) \]
O gráfico de \(u[kT]\) pode ser obtido pelo próprio Matlab via comando step(.):
\[ \texttt{step (aux) }=\mathcal{L}^{-1} \left\{ \texttt{aux} \cdot \underbrace{R(z)}_{\text{Degrau}} \right\} \]
Verificando amplitudes geradas para ação de controle do Controlador Lead:
>> aux_Lead=K_Lead*C_Lead/(1+K_Lead*C_Lead*BoG);
>> step(aux_Lead)
>> title('Ação Controle, u[kT], Lead')O controlador Lead gera as seguintes amplitudes para a ação de controle:
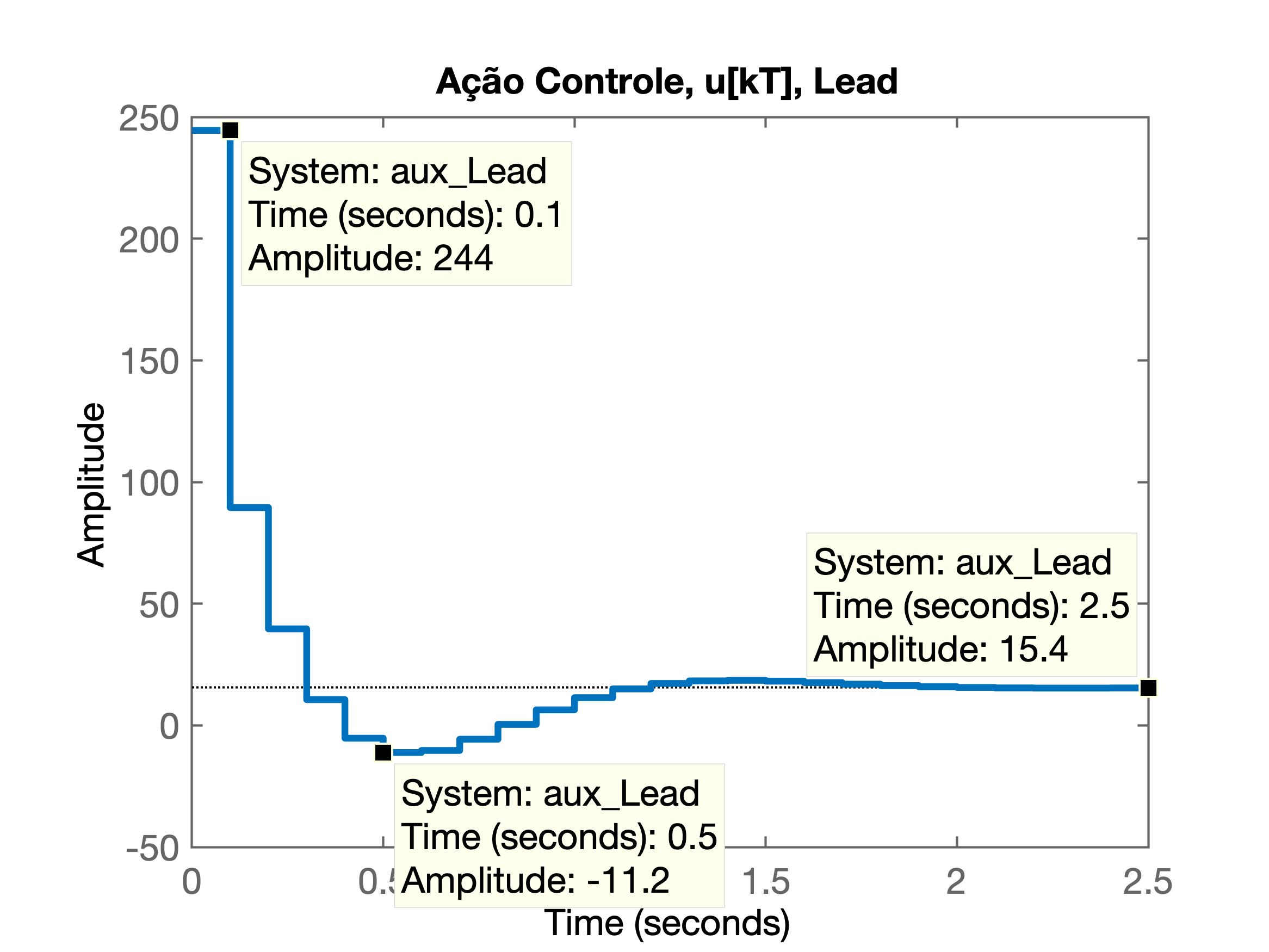
Como esperado, este controlador gera picos transitórios inciais de amplitude bastante elevada.
>> % Das aulas passadas temos recuperado do arquivo planta.mat, vários dados:
>> figure; step(aux_Kp, aux_PI, aux_PD, aux_Lead)
>> axis([0 4 -30 350]) % realizando um "zoom" numa região de interesse
>> % Figura salva como: acoes_controladores.pngA figura abaixo mostra as ações de controle executadas por 4 controladores diferentes:
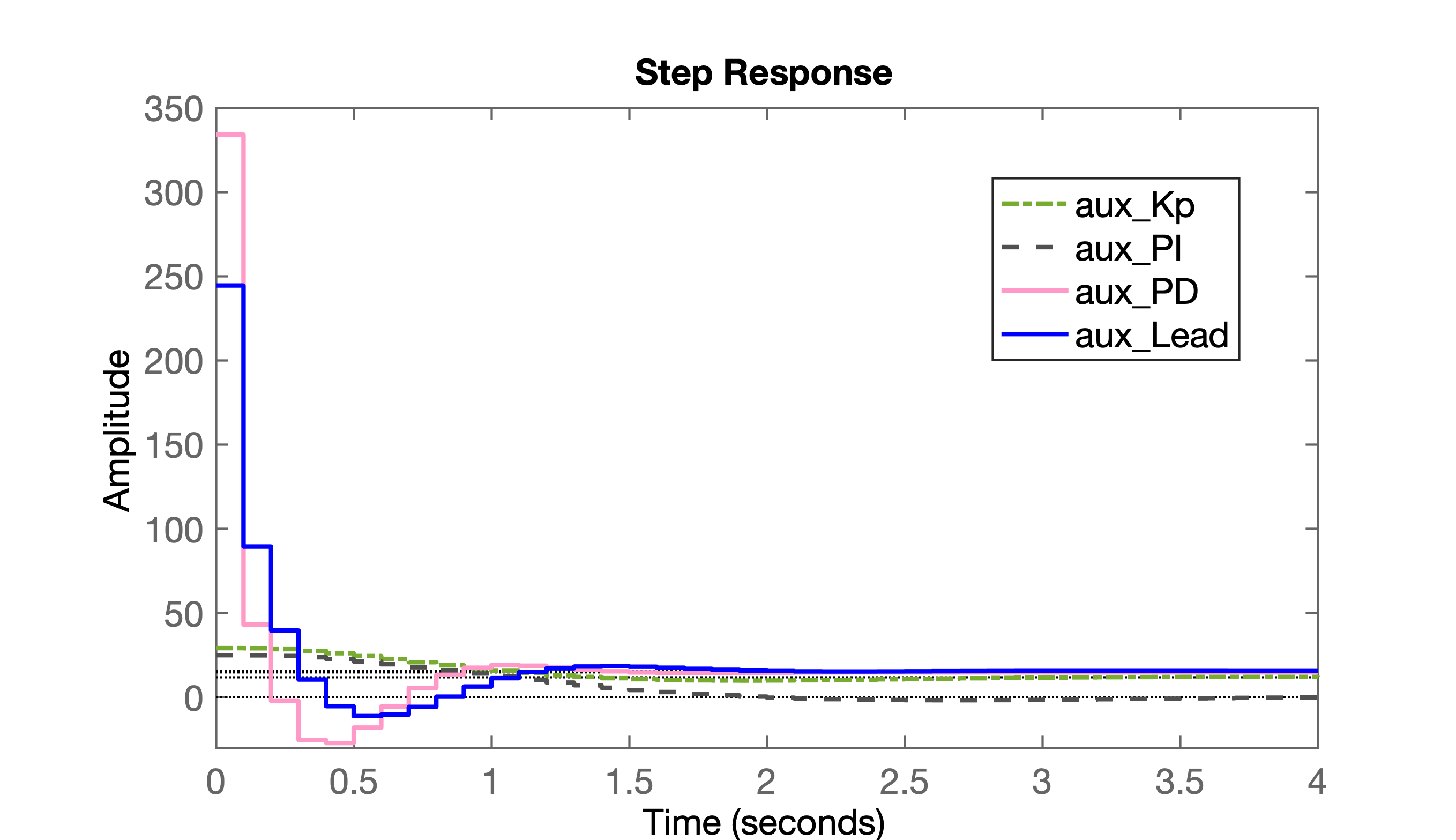
Percebe-se que o PD e o Lead são os mais agressivos
com a planta. Sendo que o PD é o que gera as maiores amplitudes para o sinal de controle.
Seja a planta:
\[ G(s)=\dfrac{10}{(s+10)(s+1)} \]
O projeto e teste do controlador no Matlab fica:
>> save planta % salvando todo o workspace anterior (estudo de caso)
>> clear all % limpando todas as variáveis
>> clsoe all % fechando todas as janelas gráficas
>> %
>> % Recomeçando do zero...
>> %
>> % ## Teste do Controalador Dead-beat
>> %
>> G=tf(10,poly([-1 -10]));
>> zpk(G)
ans =
10
------------
(s+10) (s+1)
Continuous-time zero/pole/gain model.
>> T=0.1;
>> BoG=c2d(G, T);
>> zpk(BoG)
ans =
0.035501 (z+0.6945)
---------------------
(z-0.9048) (z-0.3679)
Sample time: 0.1 seconds
Discrete-time zero/pole/gain model.O controlador dead-beat deve seguir então a equação:
\[ C(z)=\dfrac{K \cdot (z-0.9048) (z-0.3679)}{(z+0.6945) \underbrace{(z+1)}_{\text{Integrador}} } \]
De forma que:
\[ FTMA(z)=C(z) \cdot BoG(z)=\dfrac{1}{(z+1)} \]
e a malha-fechada resulte em:
\[ FTMF(z)=\dfrac{FTMA(z)}{1+FTMA(z)}=\ldots=\dfrac{1}{z} \]
O que significa que o RL deste sistema resulta bastante simples: só existe um pólo de MA em \(z=1\) e quando a malha é fechada (\(K>0\)), este se move
de \(z=1\) até \(z=-\infty\) passando sobre a origem do plano-z. Ocorre que quanto mais próximo um pólo de MF estiver da origem do plano-z, mais rápida será sua resposta a um degrau. No caso do pólo de MF ficar localizado justamente sobre \(z=0\), coincide que temos a função transferência da entrada degrau (\(=1/z\)) deslocado de um período de amostragem, ou seja, se conseguirmos posicionar o pólo de MF justamente sobre a origem do plano-z, faremos com que o sistema convirja para o regime permanente, sem erro, sem overshoot no instante de tempo igual à \(t \ge T\) (ou seja, na amostra \(k=1\)).
Forçando
o Matlab para compor o \(C(z)\) conforme desejado:
>> num_BoG=poly(zero(BoG)) % separando os zeros de BoG(z)
num_BoG =
1.0000 0.6945
>> den_BoG=poly(pole(BoG)) % separando os pólos de BoG(z)
den_BoG =
1.0000 -1.2727 0.3329
>> % Falta incluir integrador no denominador do C_deadbeat
>> den_C_deadbeat=conv(num_BoG,[1 -1])
den_C_deadbeat =
1.0000 -0.3055 -0.6945
>> % outra forma de obter den_C_deadbeat
>> den_C_deadbeat2=poly([1 zero(BoG)])
den_C_deadbeat2 =
1.0000 -0.3055 -0.6945
>> C_deadbeat=tf(den_BoG, den_C_deadbeat,T) % montando C(z)
C_deadbeat =
z^2 - 1.273 z + 0.3329
-----------------------
z^2 - 0.3055 z - 0.6945
Sample time: 0.1 seconds
Discrete-time transfer function.
>> zpk(C_deadbeat) % colocando C(z) num formato mais "agradável"
ans =
(z-0.9048) (z-0.3679)
---------------------
(z-1) (z+0.6945)
Sample time: 0.1 seconds
Discrete-time zero/pole/gain model.Percebemos que determinanmos o \(C(z)\) conforme o desejado. Resta agora determinar \(FTMA(z)\) e \(FTMF(z)\):
>> ftma=C_deadbeat*BoG;
>> zpk(ftma)
ans =
0.035501 (z+0.6945) (z-0.9048) (z-0.3679)
-----------------------------------------
(z+0.6945) (z-0.9048) (z-1) (z-0.3679)
Sample time: 0.1 seconds
Discrete-time zero/pole/gain model.Note que vários termos se cancelam (com excessão do termo 0.035501).
Notamos que quase temos \(FTMA(z)\) da forma desejada: \(FTMA(z)=1/(z-1)\), bastando acrescentar o ganho adequado para \(C(z)\):
>> K_C_deadbeat=1/0.035501
K_C_deadbeat =
28.1682
>> figure; rlocus(ftma)
>> ftmf=feedback(K_C_deadbeat*ftma, 1);
>> figure; step(ftmf)
>> % grafico salvo como: step_dead_beat_teste.pngFinalmente temos o gráfico com a resposta ao degrau para este controlador:
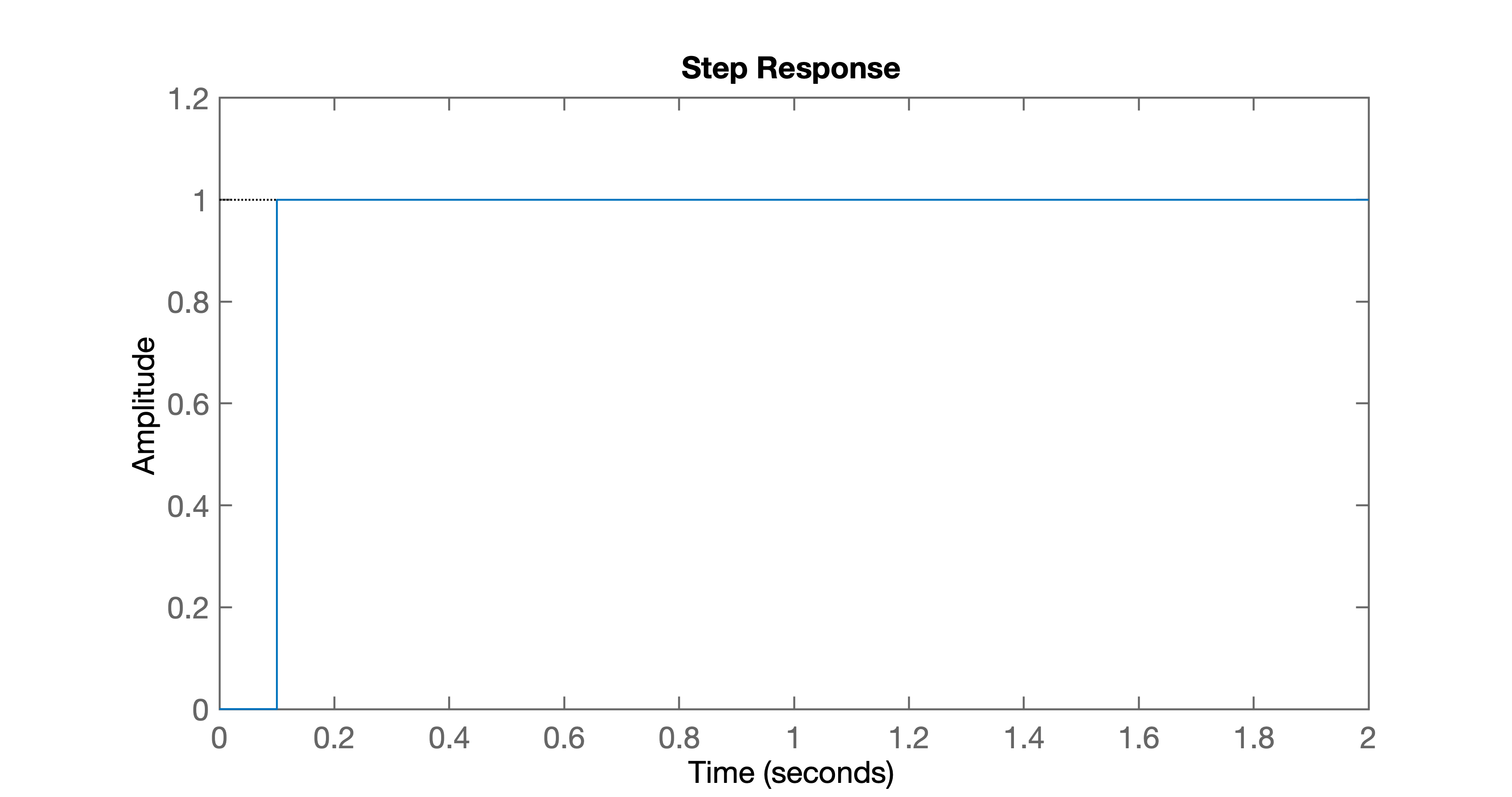
Note que foi possível fazer a planta entrar em regime permanente a partir do instante de amostragem \(k=1% em \)t=T=0,1$.
Segue o diagrama de RL que comprova o que foi realizado:
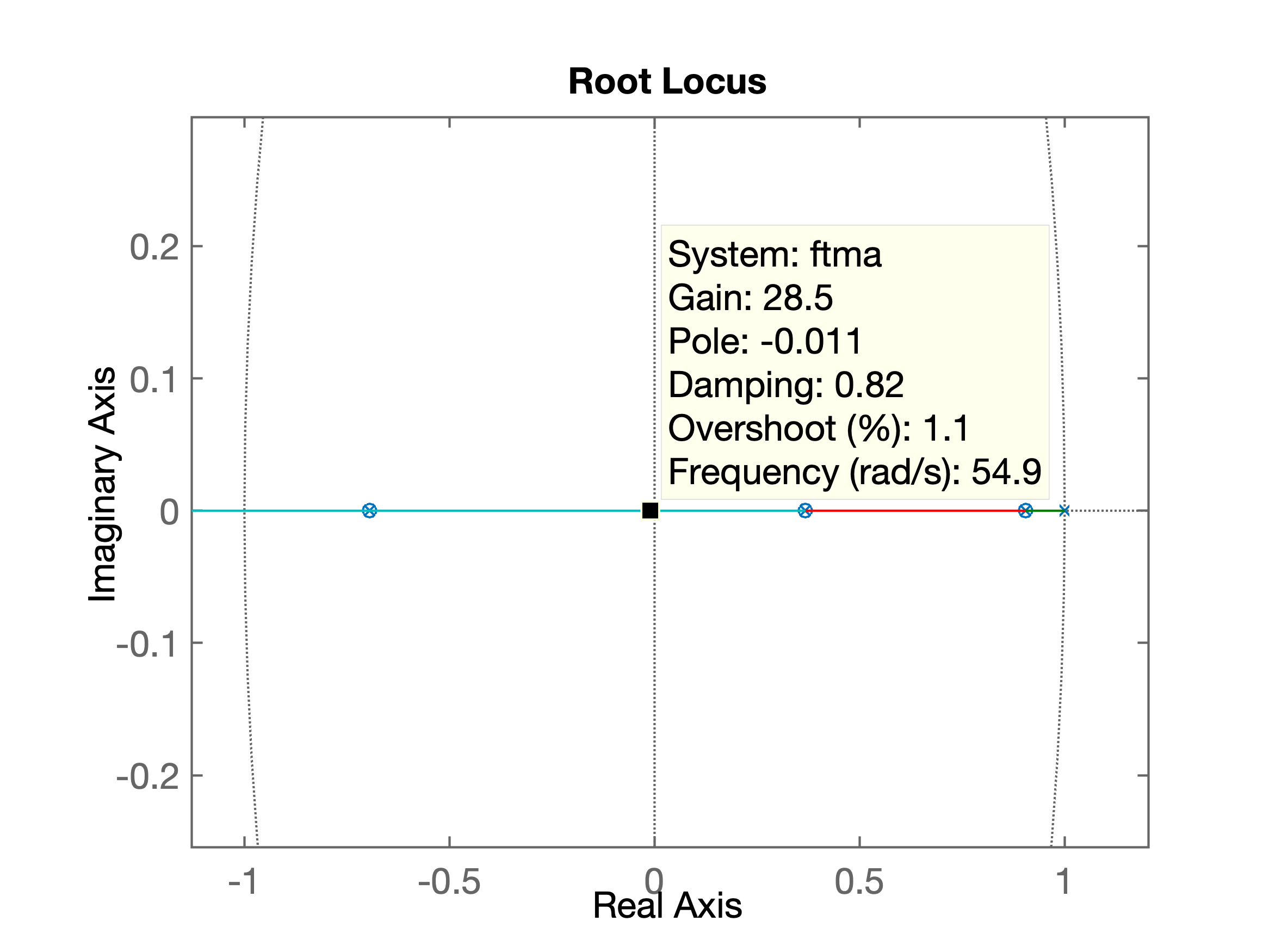
Reparr que tentamos posicionar o mouse o tanto que for possível sobre a origem do plano-z, o que fez surgir o DataTip com o dado K=28.5 (mas neste caso, repare que o pólo de MF se encontra em \(z=-0,011\)).
O valor calculado para o ganho do controlador seria: \(K_{\text{Deadbeat}}=1/0.035501=28.1682\).
Apesar de garantir que a planta convergiu muito rapidamente para o valor desejado (entrada degrau, \(y[kT]=1\) para \(k \ge 0\)), é bom perceber que isto foi às custas de consideráveis amplitudes geradas para o sinal de controle logo nos primeiros instantes de amostragem. Comprovando isto com a ajuda do Matlab:
>> %
>> % Mas.... Verificando ação de controle...
>> %
>> aux=K_C_deadbeat*C_deadbeat/(1+K_C_deadbeat*C_deadbeat*BoG);
>> figure; step(aux)Segue figura mostrando as amplitudades geradas para a ação de controle deste controlador:
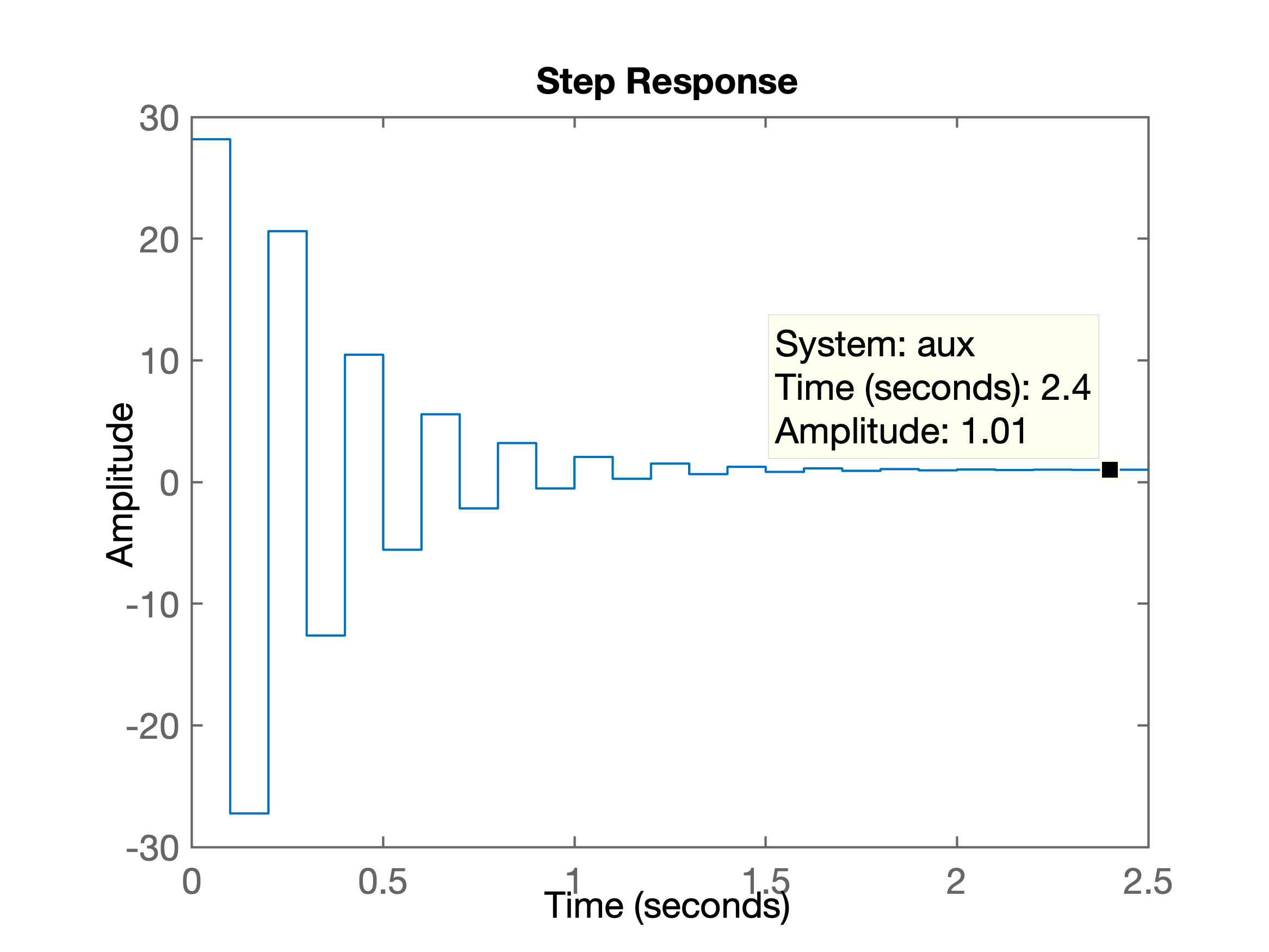
Note as amplitudes iniciais variando próximo de \(\pm 30\). Mas \(u[kT]\) em regime permanente tende à 1,0.
>> clear all % limpando memória com dados antigos
>> close all % fechando janelas gráficas
>> load planta % recuperando dados da planta e controladores estudo casoEspecificando o controlador dead-beat
>> zpk(BoG) % recordando expressão da planta, BoG(z)
ans =
0.00012224 (z+2.747) (z+0.1903)
--------------------------------
(z-0.9048) (z-0.8187) (z-0.3679)
Sample time: 0.1 seconds
Discrete-time zero/pole/gain model.Separando os componentes necessários para o deadbeat a partir dos dados de \(BoG(z)\):
>> zero(BoG)
ans =
-2.7471
-0.1903
>> % Existe um zero instável (em z = -2.7471)
>> zeros_BoG=zero(BoG)
zeros_BoG =
-2.7471
-0.1903
>> zeros_BoG(2)
ans =
-0.1903
>> den_C_deadbeat=poly(zeros_BoG(2)) % só considero zero em z = -0.1903
den_C_deadbeat =
1.0000 0.1903
>> num_C_deadbeat=poly(polo(BoG)) % separando pólos de BoG(z)
Undefined function or variable 'polo'.
>> num_C_deadbeat=poly(pole(BoG)) % separando pólos de BoG(z)
num_C_deadbeat =
1.0000 -2.0914 1.3749 -0.2725
>> % incluindo integrador no C_deadbeat:
>> den_C_deadbeat=poly([zeros_BoG(2) 1])
den_C_deadbeat =
1.0000 -0.8097 -0.1903
>> C_deadbeat=tf(num_C_deadbeat, den_C_deadbeat, T);
>> zpk(C_deadbeat)
ans =
(z-0.9048) (z-0.8187) (z-0.3679)
--------------------------------
(z-1) (z+0.1903)
Sample time: 0.1 seconds
Discrete-time zero/pole/gain model.
Para compatibilizar o grau do numerador com o grau no denominador de \(C(z)\), se faz necessário acrescentar + 1 pólo. Inicialmente acrescentando um segundo integrador:
>> % Acrescentando + 1 integrador, grau(den)=grau(num)
>> den_C_deadbeat=poly([zeros_BoG(2) 1 1]);
>> C_deadbeat=tf(num_C_deadbeat, den_C_deadbeat, T);
>> zpk(C_deadbeat)
ans =
(z-0.9048) (z-0.8187) (z-0.3679)
--------------------------------
(z-1)^2 (z+0.1903)
Sample time: 0.1 seconds
Discrete-time zero/pole/gain model.
>> ftma_C_deadbeat=C_deadbeat*BoG;
>> zpk(ftma_C_deadbeat) % Verificando FTMA(z) resultante:
ans =
0.00012224 (z+2.747) (z-0.9048) (z-0.8187) (z-0.3679) (z+0.1903)
--------------------------------------------------------------
(z+0.1903) (z-0.3679) (z-0.8187) (z-0.9048) (z-1)^2
Sample time: 0.1 seconds
Discrete-time zero/pole/gain model.O Matlab não cancela automaticamente os termos comuns presentes numa “transfer function”, diferente do que uma pessoa faria resolvendo o problema analiticamente. Mas é possível usar a função minreal(.) para forçar o cancelamento de termos:
>> ftma_C_deadbeatR=minreal(ftma_C_deadbeat,1E-4);
>> zpk(ftma_C_deadbeatR)
ans =
0.00012224 (z+2.747)
--------------------
(z-1)^2
Sample time: 0.1 seconds
Discrete-time zero/pole/gain model.Desta forma, verifica-se que os cancelamentos pretendidos foram realizados. Resta verificar como fica o RL desta função transferência em malha-aberta:
>> figure; rlocus(ftma_C_deadbeat)
>> % Figura salva como: RL_deadbeat_integrador_duplo.pngO RL resultante aparece na próxima figura:
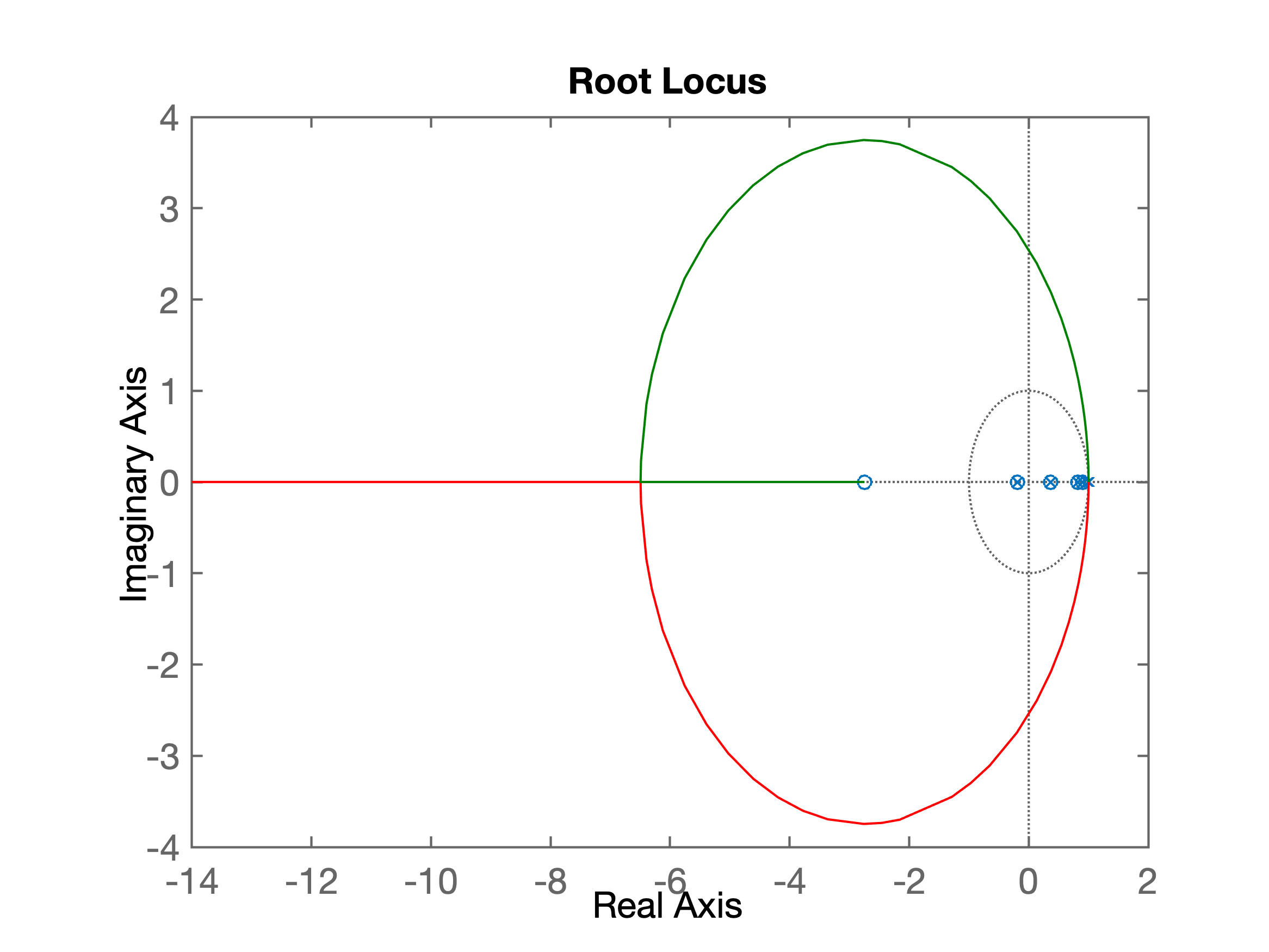
Conclusão: Pelo RL percebe-se que qualquer ganho não-nulo positivo (\(K >ge 0\)) deixa o sistema instável em MF. Isto significa que, para o caso desta planta, não é possível usar um duplo integrador. O pólo extra, necessário para \(C(z)\), terá que ser alocado em outra posição.
Como não foi possível introduzir um integrador duplo em \(C(z)\) e com base no traçado do RL anterior, percebemos que é melhor (mais conveniente) introduzir o pólo extra na região real negativa do plano-z para forçar o deslocamento do pólo de MF de \(z=1\) até \(z=p_c\), fazendo o mesmo passar sobre a origem do plano-z. Se o \(p_c\) ficar no eixo real positivo do plano-z o pólo de MF não passará sobre a origem no plano-z e consequentemente não será possível atingir a resposta em regime permanente no menor tempo possível (preferencialmente em \(k=1\)). Por isto o \(p_c\), neste caso, fica localizado na parte negativa real do plano-z.
Até este ponto só sabemos que este pólo extra deve estar na parte negativa real (e estável) do plano-z, mas não sabemos exatamente onde. Poderia ser adotado o método da contribuição angular para encontrar precisamente o local de \(p_c\). Mas por hora, nos contentaremos em colocar o \(p_c\) em \(z=-0,5\) e veremos o que sucede.
Então:
>> den_C_deadbeat2=poly([zeros_BoG(2) 1 -0.5]);
>> % acrescentei um pólo em z = -0,5
>> C_deadbeat2=tf(num_C_deadbeat, den_C_deadbeat2, T);
>> zpk(C_deadbeat2) % verificando a eq. final de C(z)
ans =
(z-0.9048) (z-0.8187) (z-0.3679)
--------------------------------
(z-1) (z+0.5) (z+0.1903)
Sample time: 0.1 seconds
Discrete-time zero/pole/gain model.
>> % Determinando a nova FTMA(z):
>> ftma_C_deadbeat2=C_deadbeat2*BoG;
>> ftma_C_deadbeat2R=minreal(ftma_C_deadbeat2,1e-4);
>> zpk(ftma_C_deadbeat2R)
ans =
0.00012224 (z+2.747)
--------------------
(z-1) (z+0.5)
Sample time: 0.1 seconds
Discrete-time zero/pole/gain model.
>> % Verificando agora como ficou o RL:
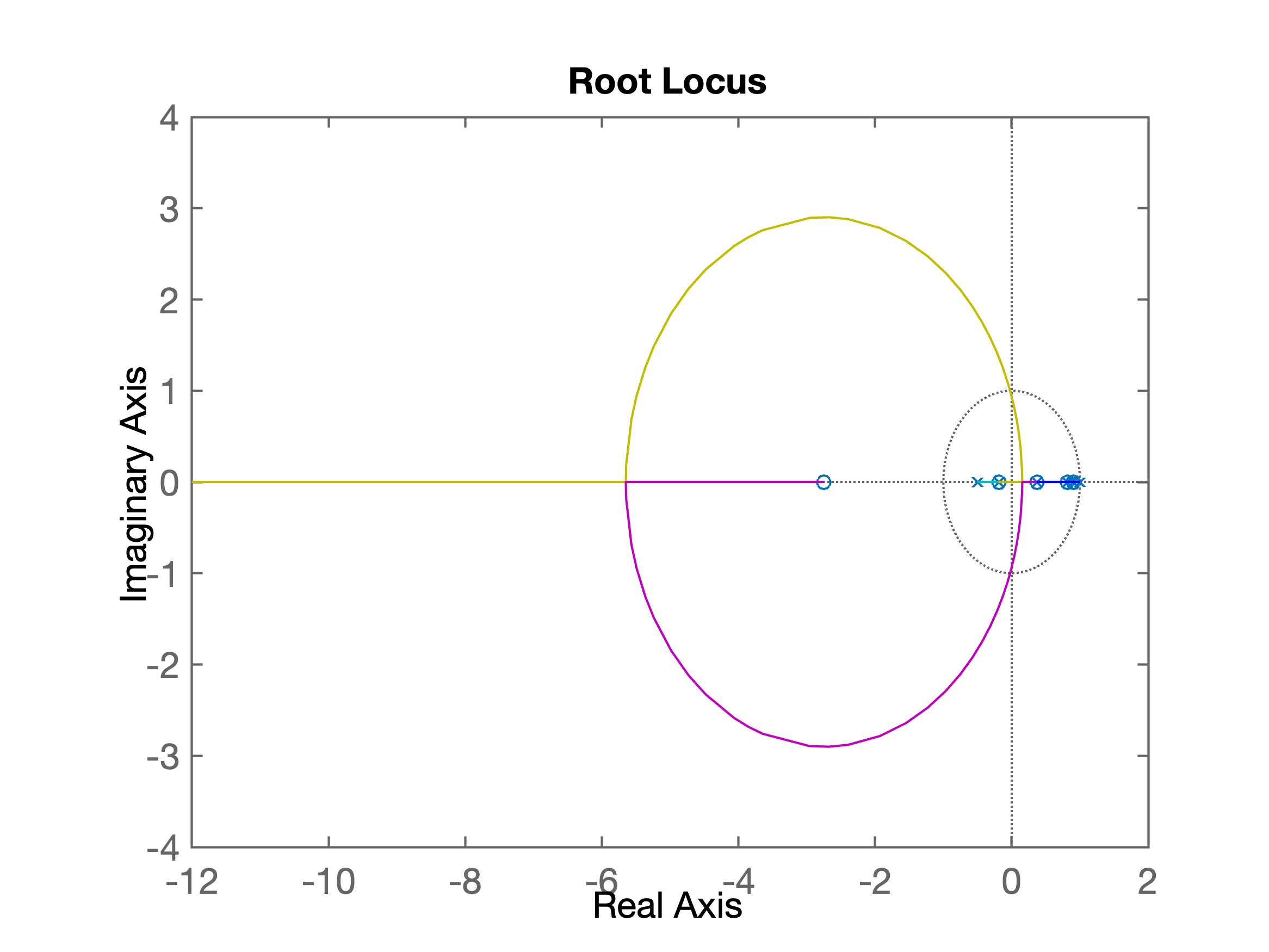
>> figure; rlocus(ftma_C_deadbeat2)
>> % figura salva como: RL_deadbeat_versao2.pngSegue a figura do RL para esta versão do controlador:
>> % Opções: 3a-versão do Deadbeat: "recuar" ainda mais o pólo em z = -0,5
>> % Problema: - quanto devo recuar? Solução: calcular o ponto de partida do RL
>> % para ocorrer na origem do plano-z....
>> %
>> % Outra opção: mantenho esta versão e sintonizo um dos pólos de MF para
>> % ocorrer sobre a origem do plano-z
>> %
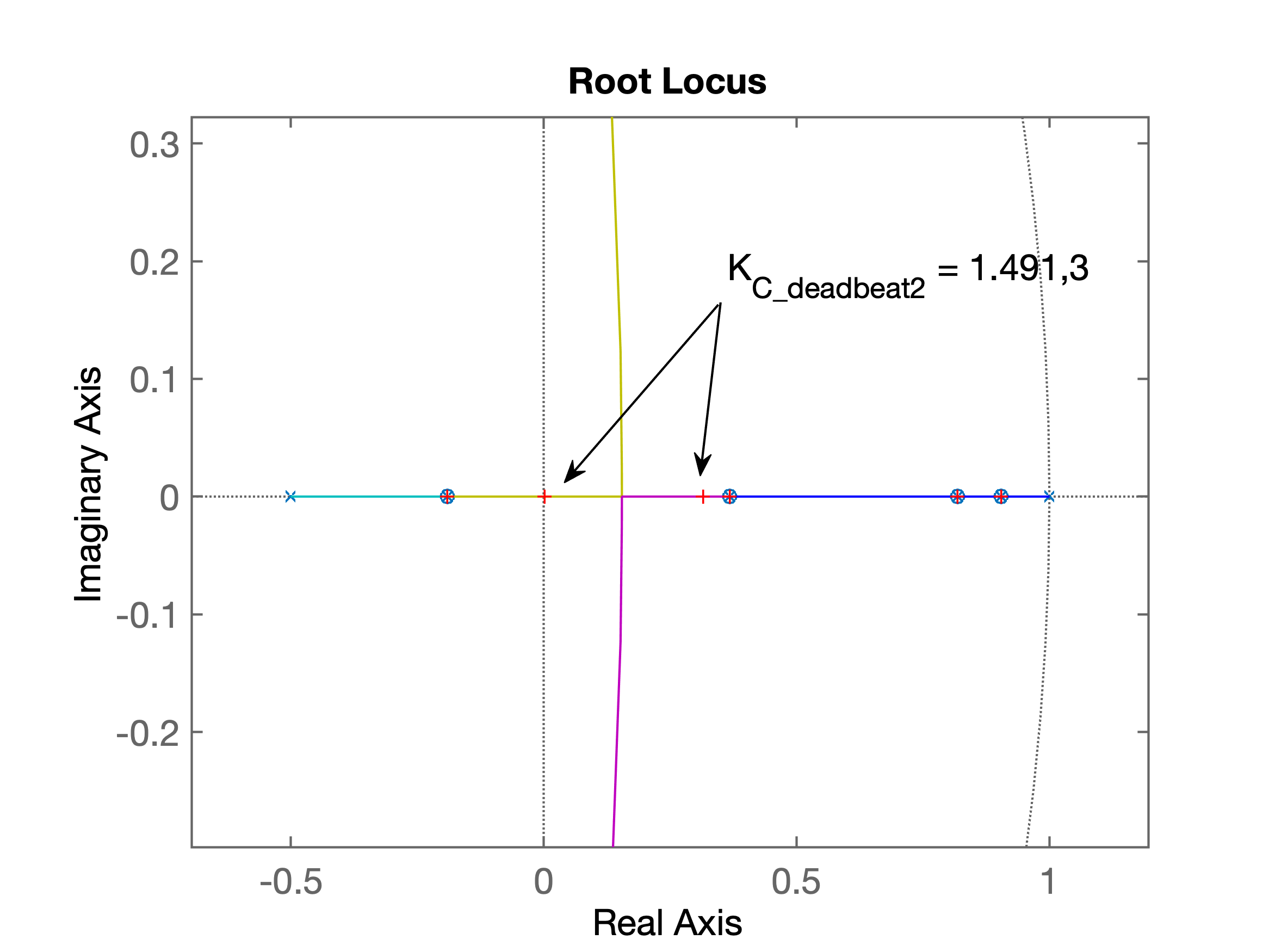
>> [K_C_deadbeat2,polosMF]=rlocfind(ftma_C_deadbeat2)
Select a point in the graphics window
selected_point =
0.0024 + 0.0009i
K_C_deadbeat2 =
1.4913e+03
polosMF =
0.9048
0.8187
0.3679
0.3153
-0.1903
0.0024
>> % RL salvo como: RL_deadbeat_versao2_sintonizado.pngO RL para este controlador sintonizado é mostrado a seguir:
Fechando a malha:
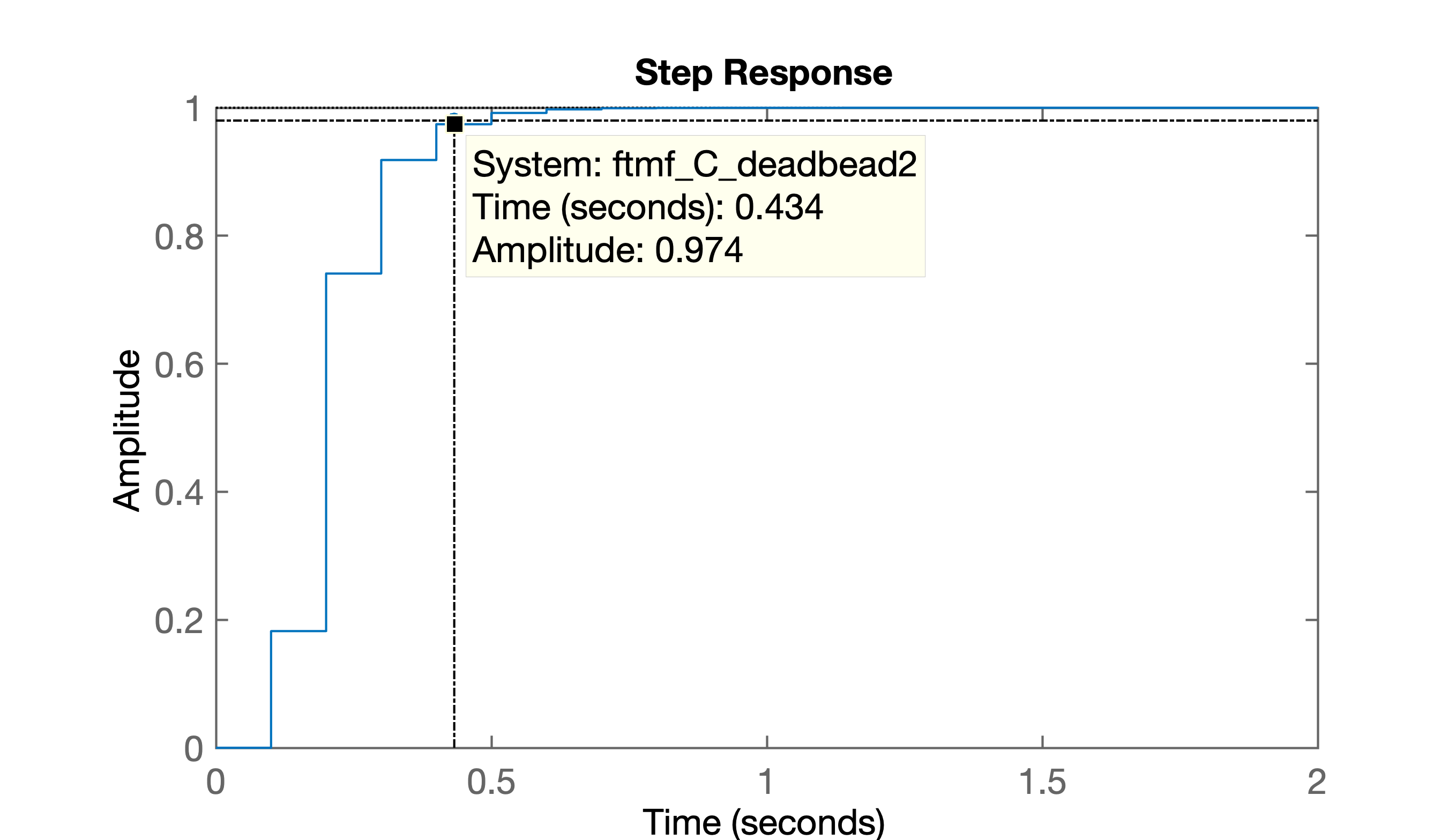
>> ftmf_C_deadbead2=feedback(K_C_deadbeat2*ftma_C_deadbeat2, 1);
>> figure; step(ftmf_C_deadbead2)
>> % figura salva como: step_deadbead2.pngSegue figura mostrando resultado obtido em malha-fechada:
Fim. Não esquecer:
>> save planta
>> diary off
>> quita dopo.