Projeto de Controlador Deadbeat
Aplicando este controlador na planta adotada no "estudo de caso".
Lembrando dados da planta:
>> load planta % carregando dados de projetos anteriores>> zpk(G) % eq. da planta no mundo contínuo 1------------------ (s+10) (s+2) (s+1)Continuous-time zero/pole/gain model.>> T % lembrando do período de amostragem adotadoT = 0.1000>> zpk(BoG) % lembrando da "versão digital" da planta 0.00012224 (z+2.747) (z+0.1903) -------------------------------- (z-0.9048) (z-0.8187) (z-0.3679)Sample time: 0.1 secondsDiscrete-time zero/pole/gain model.>> % capturando informações dos pólos e zeros de BoG(z)>> [numd, dend] = tfdata(BoG, 'v')numd = 1.0e-03 * 0 0.1222 0.3591 0.0639dend = 1.0000 -2.0914 1.3749 -0.2725>> zeros_BoG = roots(numd)zeros_BoG = -2.7471 -0.1903>> polos_BoG = roots(dend)polos_BoG = 0.9048 0.8187 0.3679>> % ou outra forma maios simples de obter estas mesmas informações:>> polos_BoG=pole(BoG)polos_BoG = 0.9048 0.8187 0.3679>> zeros_BoG=zero(BoG)zeros_BoG = -2.7471 -0.1903>> % Especificando controlador Deadbeat que é praticamente>> % a função inversa de BoG(z) com excessão de pólos/zeros instáveis:>> % Iniciando a "montagem" do controlador DeadBeat:>> C_dead=tf( poly(polos_BoG) , poly(zeros_BoG(2)), T);zpk(C_dead) (z-0.9048) (z-0.8187) (z-0.3679) -------------------------------- (z+0.1903)Sample time: 0.1 secondsDiscrete-time zero/pole/gain model.>> % comparando a eq. obtida notamos que:>> % a) o grau no denominador < grau do numerador ==> sist. não causal>> % b) os cancelamentos possíveis foram realizados:>> zpk(BoG) % Comparando com eq. da planta: 0.00012224 (z+2.747) (z+0.1903) -------------------------------- (z-0.9048) (z-0.8187) (z-0.3679)Sample time: 0.1 secondsDiscrete-time zero/pole/gain model.>> % Acrescentando 2 pólos que faltam ao DeadBeat>> % Numa primeira versão (tentativa): integradores duplos:>> % pólos duplos em z=1>> C_dead=tf( poly(polos_BoG) , poly( [zeros_BoG(2) 1 1 ] ), T);>> zpk(C_dead) (z-0.9048) (z-0.8187) (z-0.3679) -------------------------------- (z-1)^2 (z+0.1903)Sample time: 0.1 secondsDiscrete-time zero/pole/gain model.>> % Infelizmente neste caso, esta versão não serve:>> ftma_dead=C_dead*BoG;>> zpk(ftma_dead) 0.00012224 (z+2.747) (z-0.9048) (z-0.8187) (z-0.3679) (z+0.1903) ---------------------------------------------------------------- (z+0.1903) (z-0.3679) (z-0.8187) (z-0.9048) (z-1)^2Sample time: 0.1 secondsDiscrete-time zero/pole/gain model.>> rlocus(ftma_dead)O RL obtido para esta primeira versão do Deadbeat é mostrado à seguir:
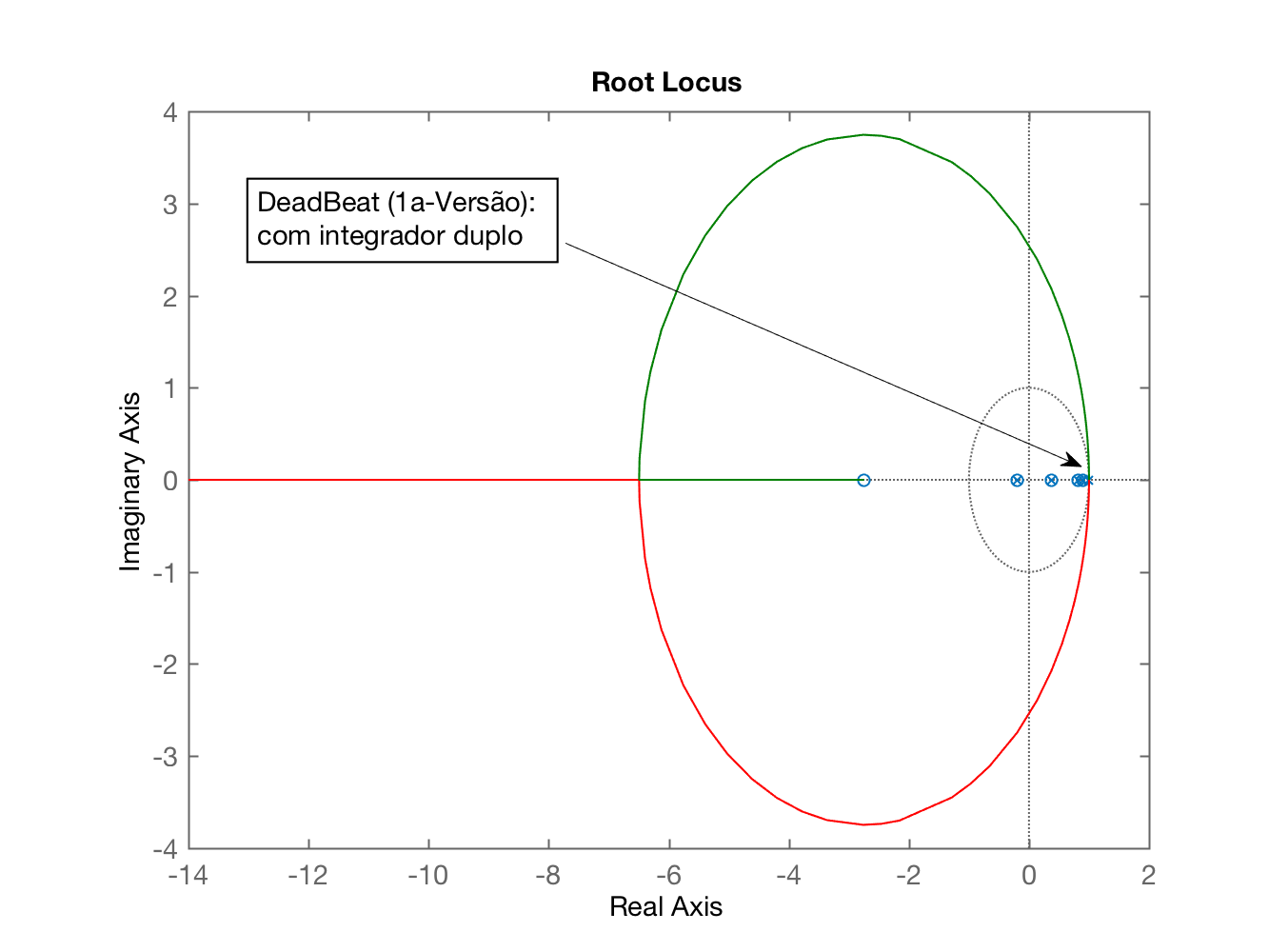
Note que muitos cancelamentos foram realizados, mas infelizmente, os 2 pólos duplos em , criaram 2 traçados de RL que já partem da borda do círculo unitário (em ) para fora do circulo unitário para qualquer valor de ganho . Então, esta opção é inviável, já deixa nosso sistema instável de partida.
Temos que definir uma nova posição para os 2 pólos que faltam. Pela teoria já estudada, percebemos que é útil manter um dos integradores (um dos pólos em ) para garantir erro nulo para entrada degrau, mas o outro pólo que falta definir não pode se localizar neste mesmo lugar. Este pólo deve ser estável, portanto, deve estar dentro do círculo unitário: em . Supondo que o ponto de partida (break out) para sugir no RL na metade do caminho entre estes 2 pólos, o ideal seria que este ponto de partida coincidesse com a origem do plano- para garantir o menor tempo de resposta possível (teríamos 2 pólos de malha fechada reais em ). Apostando então nesta proposta, colocamos este pólo extra, exatamente do outro lado do círculo unitário em .
>> % 2a-versão para o Deadbeat:>> C_dead=tf( poly(polos_BoG) , poly( [zeros_BoG(2) 1 -1 ] ), T);>> ftma_dead=C_dead*BoG;>> figure; rlocus(ftma_dead)Desta vez é gerado o seguinte RL:
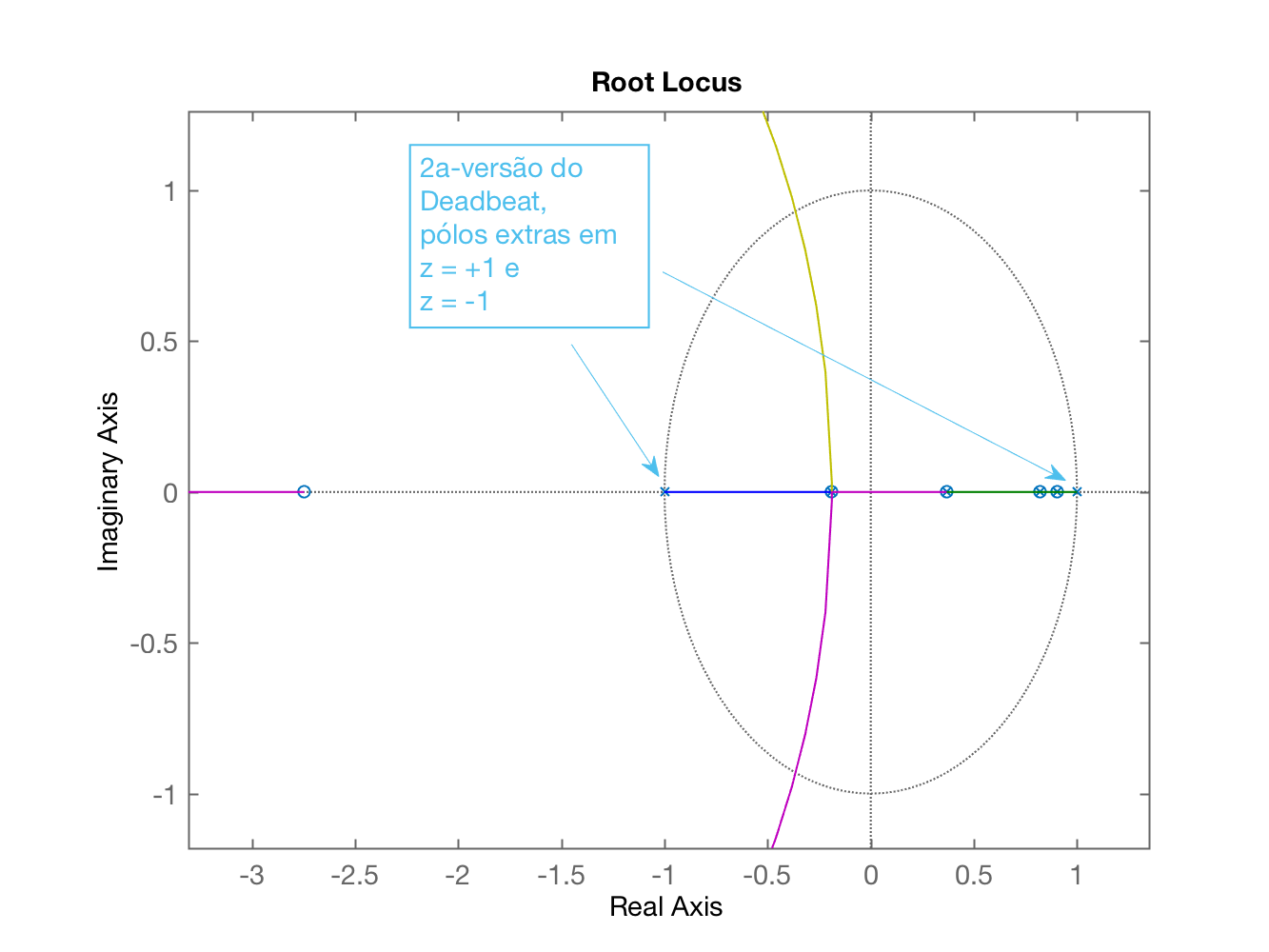
Percebemos que esta opção é bem melhor que primeira, mas que poderia ser melhorada. O que ocorre é que nesta 2a-versão termos pólos complexos dentro do circulo unitário (estáveis), mas na parte negativa real do plano-, o que implica que teremos uma resposta sub-amortecida, mas mais oscilatória que o desejado, porque pólos de MF na parte real negativa do plano- implicam em alternânciad e sinal nos componentes da transformada inversa entre cada instante de amostragem, ou seja, uma oscilação muito maior que a desejada, o que, se for possível, devemos evitar.
Surge então uma 3a-proposta: ao invés de colocar o pólo extra em , aproximamos um pouco mais este pólo de . Na verdade, colocaremos este pólo exatra em . A idéia aqui é deslocar o ponto de partida do novo RL que será gerado, para a parte positiva real do plano-, ou até, se tivemos "sorte", fazê-lo recair justo sobre a origem no plano-. Testando:
>> % Melhorando um pouco mais o C_dead>> C_dead=tf( poly(polos_BoG) , poly( [zeros_BoG(2) 1 -0.5 ] ), T);>> ftma_dead=C_dead*BoG;>> figure; rlocus(ftma_dead)Segue o RL obtido para esta 3a-versão:
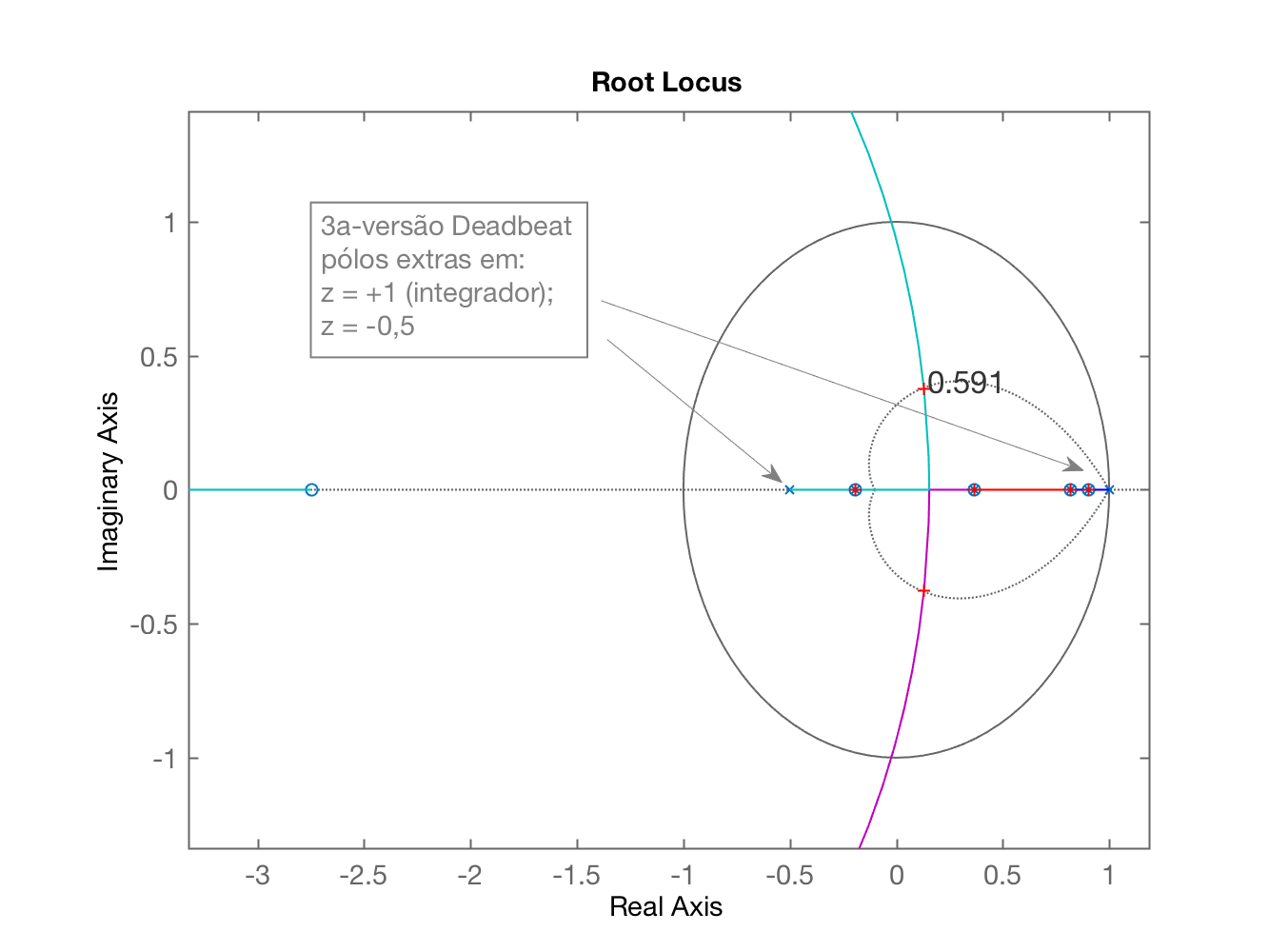
Pelo gráfico se percebe que esta solução é melhor que a 2a-versão, até sugere que talvez posicionar o pólo extra em talvez faça com o ponto de partida coincida com a origem do plano-. Mas a fim de não alongar ainda mais o tempo já consumido na proposta deste tipo de controlador, vamos ficar com esta versão, da forma como está.
>> % Então nosso controlador Deadbeat assumira os>> % seguintes pólos e zeros:>> zpk(C_dead) (z-0.9048) (z-0.8187) (z-0.3679) -------------------------------- (z-1) (z+0.5) (z+0.1903)Sample time: 0.1 secondsDiscrete-time zero/pole/gain model.>> OS % lembrando o sinalsinal que estava sendo adotadoOS = 10>> % sobrepondo a linha guia do \zeta para estes %OS no RL:>> hold on; zgrid(zeta,0)>> % Encontrando o ganho para o controlador>> [K_dead, polosMF] = rlocfind(ftma_dead)Select a point in the graphics windowselected_point = 0.1385 - 0.3778iK_dead = 1.9619e+03polosMF = 0.9048 + 0.0000i 0.8187 + 0.0000i 0.1301 + 0.3767i 0.1301 - 0.3767i -0.1903 + 0.0000i 0.3679 + 0.0000i>> % Fechando a malha com este ganho>> ftmf_dead = feedback(K_dead*ftma_dead, 1);>> figure; step(ftmf_dead)O que gera a seguinte curva de resposta em MF para entrada degrau unitário:
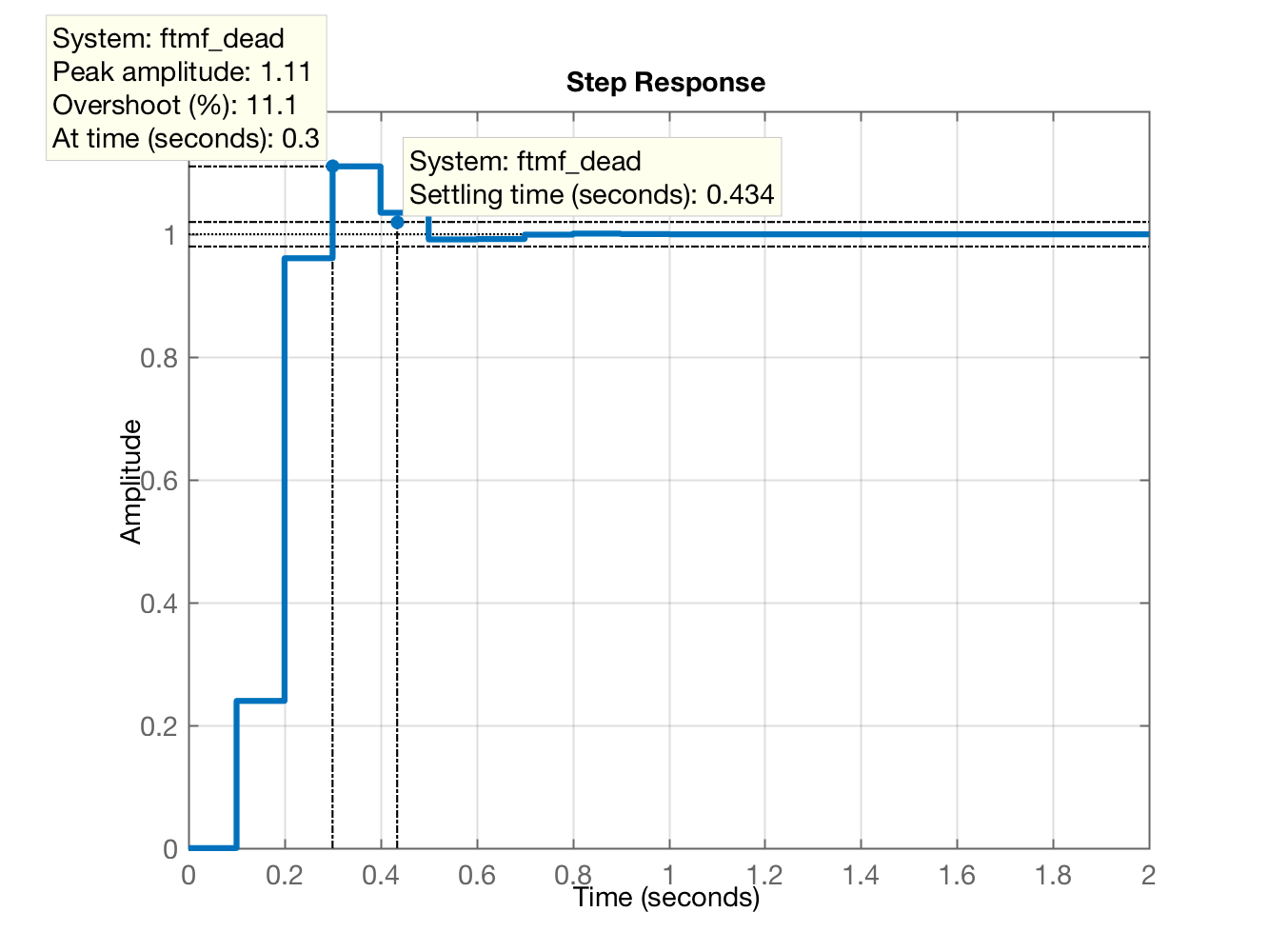
Notamos que excedemos um pouco o especificado: . Um pequeno ajuste no ganho (redução do mesmo), deve corrigir este detalhe:
>> OS % consultando %PS desejadoOS = 10>> K_dead % consultado ganho originalmente adotadoK_dead = 1.9619e+03>> % simulando outra versão com ganho ligeiramente menor>> ftmf_dead2 = feedback(1800*ftma_dead, 1);>> figure; step(ftmf_dead, ftmf_dead2)>> legend('Lead (K=1961,9)', 'Lead (K=1800)')E obtemos então como resposta:
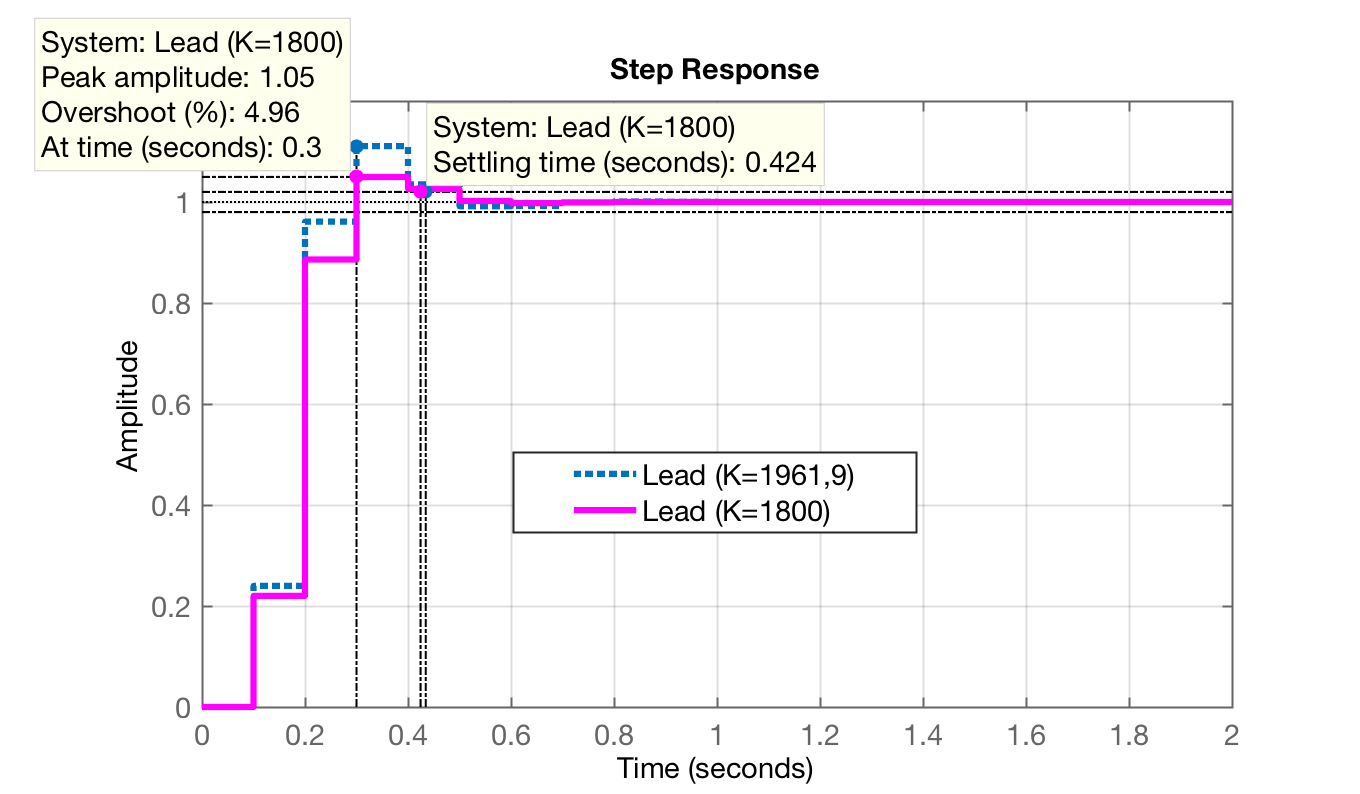
Efetivamente notamos que foi fácil restringir .
Por fim, a título de curiosidade, podemos comparar o desempenho deste controlador com outro rápido como o PD (ou Lead) já realizado anteriormente. Então:
>> figure; step(ftmf_PD, ftmf_dead)>> legend('PD', 'DeadBeat')E teremos o gráfico:
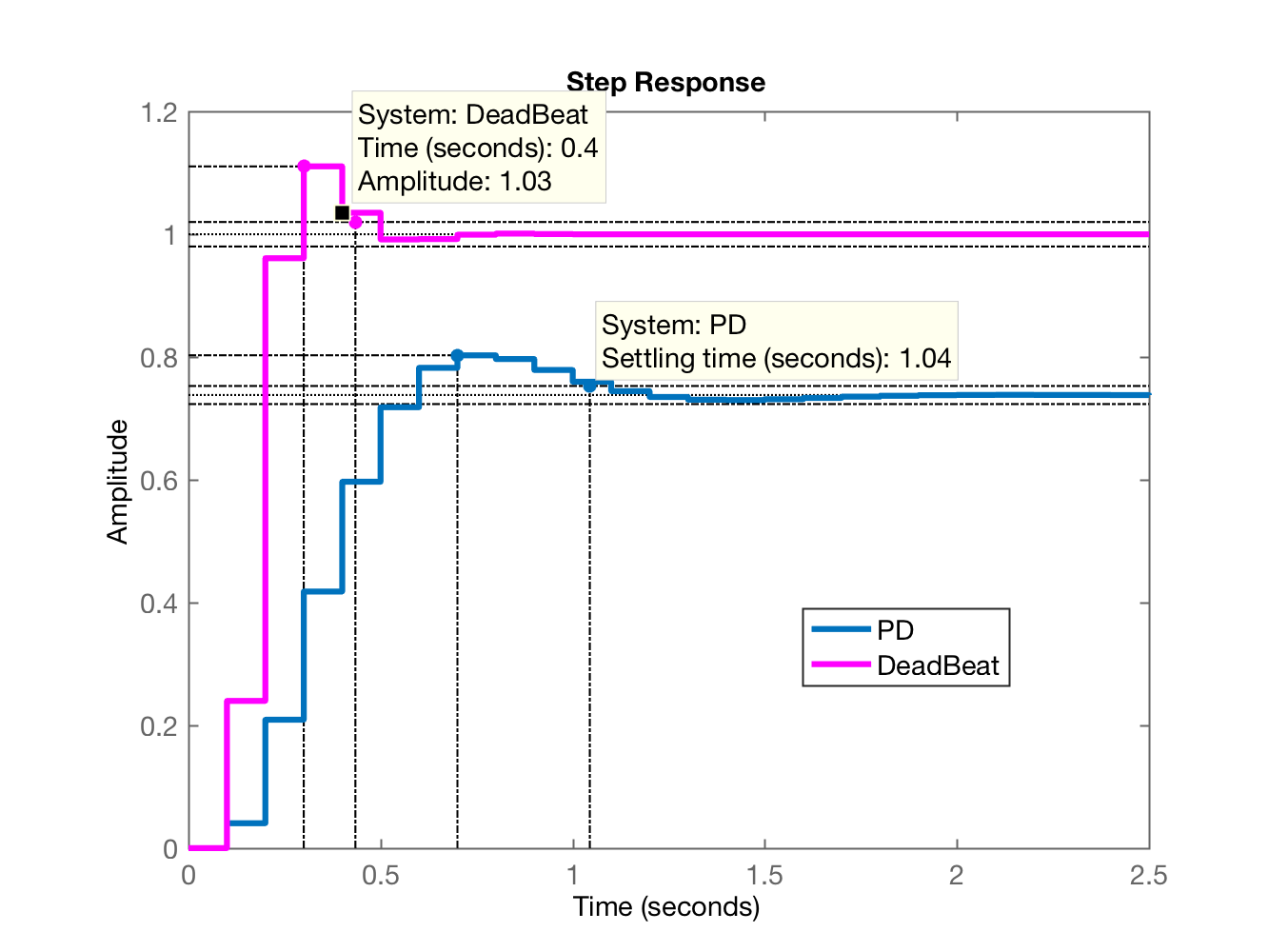
Onde podemos perceber que o controlador Deadbeat é mais rápido que o PD além de garantir erro nulo para entrada degrau (em função da presença do integrador), mesmo num caso como este, no qual não foi poss'viel cancelar todos os pólos e zeros da planta. Mas é bom é bom lembrar que este resultado não é "gratuito": isto se deve à fortes atuações (fortes amplitudes) geradas pela ação de controle, para estes tipos de controladores. Notar que o ganho do Deadbeat ficou em 1800 e o ganho do PD está em , isto nos dá uma ideia dos valores inicias das ações de controle de cada um destes controlares, o que significa que na vida real é altamente provavel que estes controladores "saturem" o driver de potência instalado entre o controlador e a planta.
Salvando a seção de trabalho atual para a próxim aula:
>> save planta2>> diary off>> quitArquivo planta2.mat disponivel.
Fernando Passold, em 09.06.2021