Projeto de Controlador LEAD (PD+FPB)
Aula de 11/11/2020
Projeto usando contribuição angular e script "" e "" (ambos devem estar na mesma pasta):
Note que para usar este script, algumas variáveis devem estar prontas de antemão, isto é, já devem existir no workspace do Matlab. Seriam as variaveis G (referente ao ) e variável T (referente ao período de amostragem adotado). Você pode preparar estas variáveis antes de executar o script ou pode editar o script e incorporar estas variaveis. Neste último caso, editar o trecho entre as linhas 10 à 16 (para informar ) e entre as linhas 19 à 21 (para informar adotado):
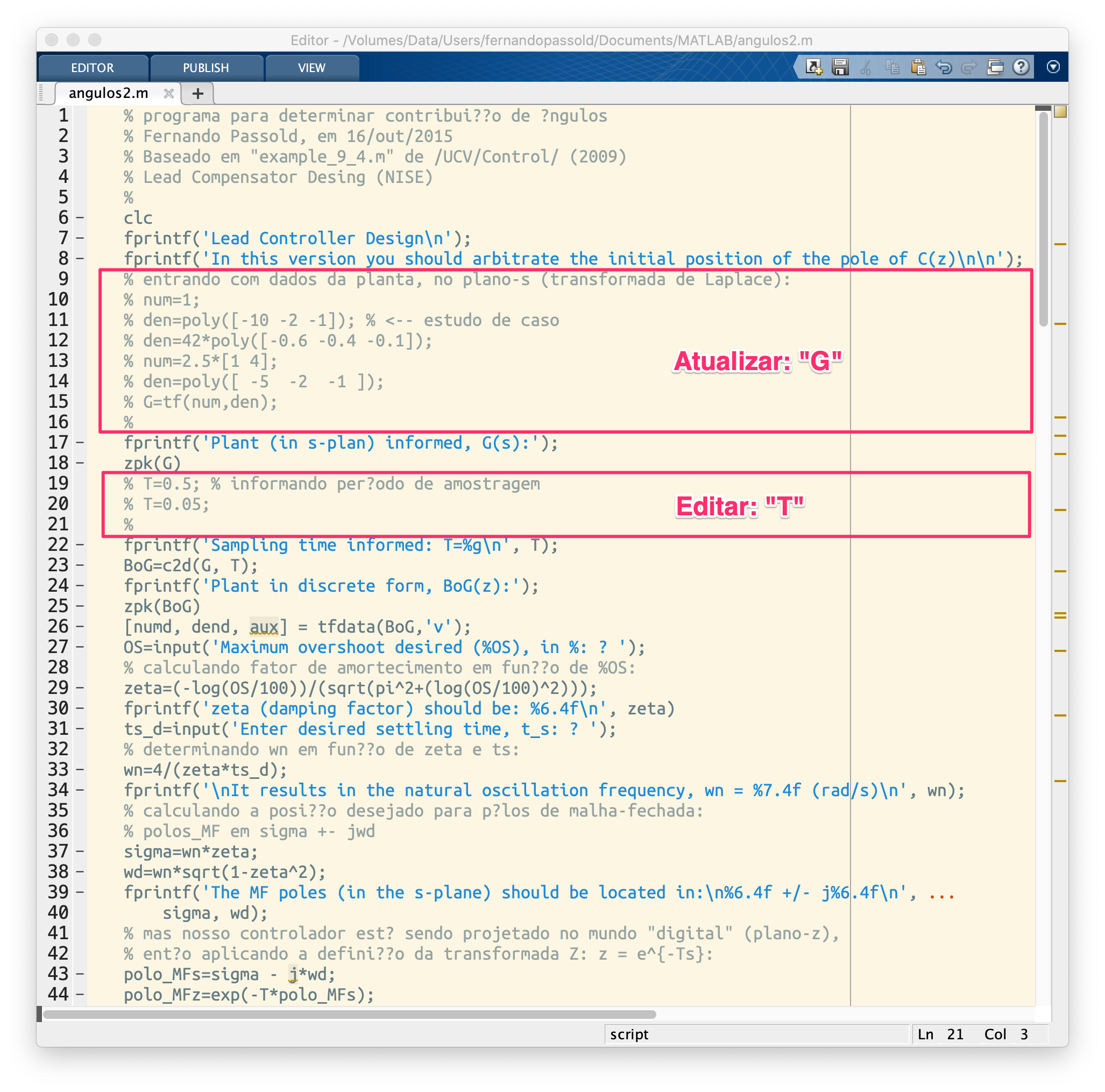
Neste caso em particular, vamos entrar com e à mão:
xxxxxxxxxx>> G=tf(1, poly ( [ -1 -2 -10 ] ) );>> zpk(G) 1 ------------------ (s+10) (s+2) (s+1) Continuous-time zero/pole/gain model.>> T=0.1;Neste projeto, vamos alocar o pólo do Compensador Lead em , manter e tentar realizar o projeto para (segundos):
xxxxxxxxxx>> angulos2Lead Controller DesignIn this version you should arbitrate the initial position of the pole of C(z)Plant (in s-plan) informed, G(s):ans = 1------------------ (s+10) (s+2) (s+1)Continuous-time zero/pole/gain model.Sampling time informed: T=0.1Plant in discrete form, BoG(z):ans = 0.00012224 (z+2.747) (z+0.1903) -------------------------------- (z-0.9048) (z-0.8187) (z-0.3679)Sample time: 0.1 secondsDiscrete-time zero/pole/gain model.Maximum overshoot desired (%OS), in %: ? 10zeta (damping factor) should be: 0.5912Enter desired settling time, t_s: ? 1.5It results in the natural oscillation frequency, wn = 4.5109 (rad/s)The MF poles (in the s-plane) should be located in:2.6667 +/- j3.6383Localization of MF poles in the z-plane should be:z = 0.7158 +/- j0.2726Enter the position of the controller pole (z-plane): ? 0.1Working with the temporary FTMA(z)...Open poles = 0.904837Open poles = 0.818731Open poles = 0.367879Open poles = 0.1Open zeros = -2.74711Open zeros = -0.190308Angular contribution of each pole in the z-plane: p1 = 0.9048 --> 124.74^o p2 = 0.8187 --> 110.69^o p3 = 0.3679 --> 38.08^o p4 = 0.1000 --> 23.88^oSum of angular contribution of poles: 297.39^oCheck the figure window -> Paused (enter to continue)...Angular contribution of each zero in the z-plane: z1 = -2.7471 --> 4.50^o z2 = -0.1903 --> 16.74^oSum of angular contribution of zeros: 21.24^oFinal angle for the zero of C(z): 96.1444^oOk, determining the position for zero of C (z)...Final position for the Lead zero: z_c=0.7451Updating final RL graph...The Lead controller final result is (variable C):ans = (z-0.7451) ---------- (z-0.1)Sample time: 0.1 secondsDiscrete-time zero/pole/gain model.>>Até aqui, temos as seguintes figuras geradas:
| Contribuições angulares | RL final |
|---|---|
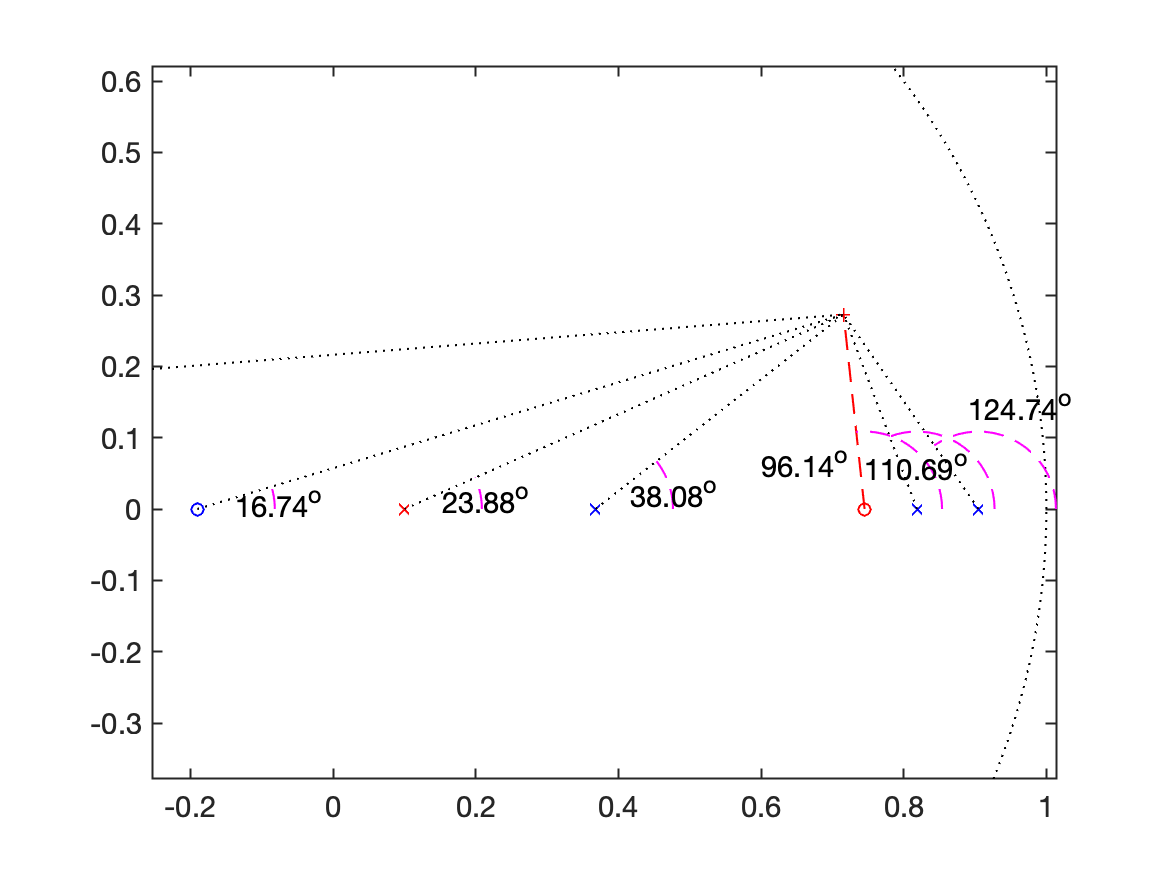 | 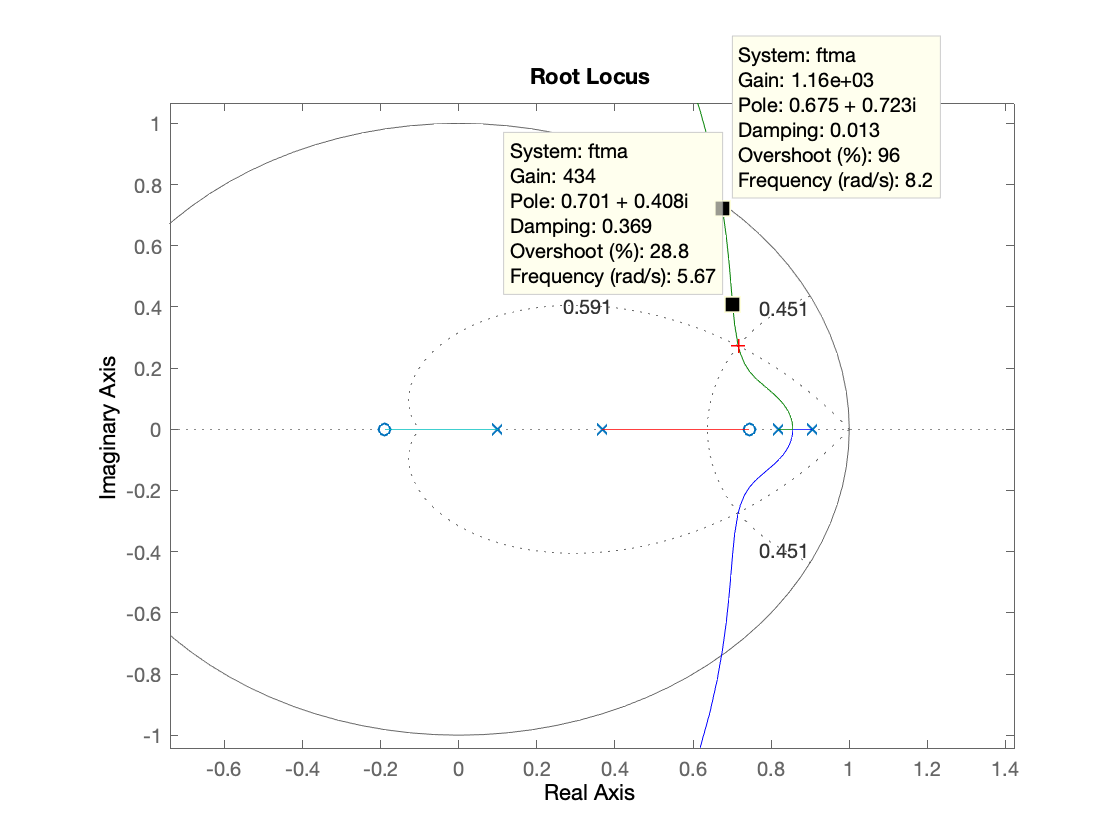 |
| Note a linha pontilha vermelha indica a posição (e ângulo) onde deveria ser localizado o pólo deste controlador. | Note que são ressaltandos 2 pontos de ganho diferentes no RL. O ganho crítico (ou máximo, ) e outro ponto de ganho: (prevendo ). |
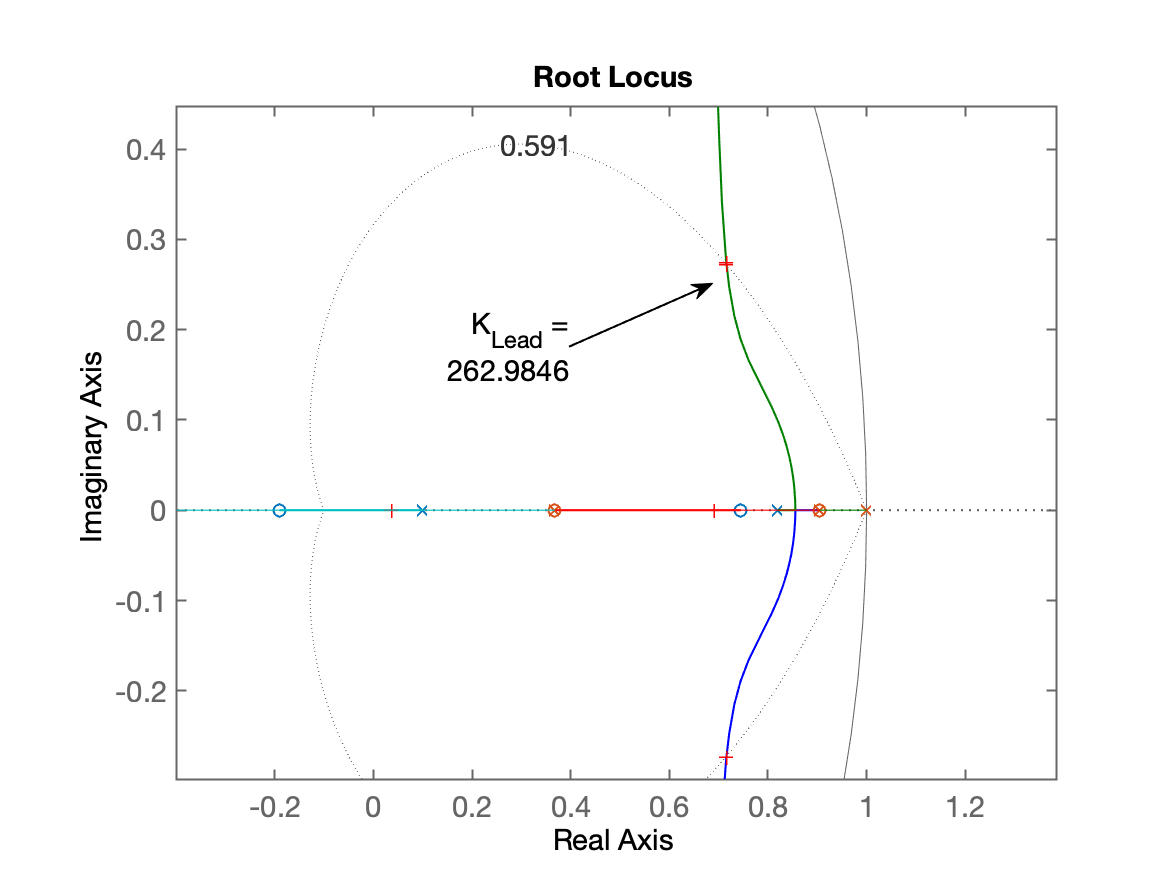
O script anterior não determina o ganho que deve ser usado, apenas automatiza a determinação do local do pólo do controlador. Então, continuando o projeto:
xxxxxxxxxx>> zpk(BoG)ans = 0.00012224 (z+2.747) (z+0.1903) -------------------------------- (z-0.9048) (z-0.8187) (z-0.3679)Sample time: 0.1 secondsDiscrete-time zero/pole/gain model.>> zpk(C)ans = (z-0.7451) ---------- (z-0.1)Sample time: 0.1 secondsDiscrete-time zero/pole/gain model.>> C_Lead=C; % apenas copiando tf de uma variável para outra>> FTMA_Lead=C_Lead*BoG;>> figure; rlocus(FTMA_Lead)>> hold on;>> zgrid(zeta,0);>> plot(real(polo_MFz), imag(polo_MFz),'r+');>> [K_Lead, polosMF]=rlocfind(FTMA_Lead)>> Select a point in the graphics windowselected_point = 0.7199 + 0.2752iK_Lead = 262.9846polosMF = 0.7155 + 0.2744i 0.7155 - 0.2744i 0.6921 + 0.0000i 0.0362 + 0.0000i>> format compact % evitar que Matlab pule tantas linhas em brancoGráfico do RL mostrando o ganho adotado:
Fechando a malha com ganho obtido anteriormente:
xxxxxxxxxx>> ftmf_Lead=feedback(K_Lead*FTMA_Lead, 1);>> figure; step(ftmf_Lead)
Resposta ao degrau obtida para este primeiro projeto do Lead:
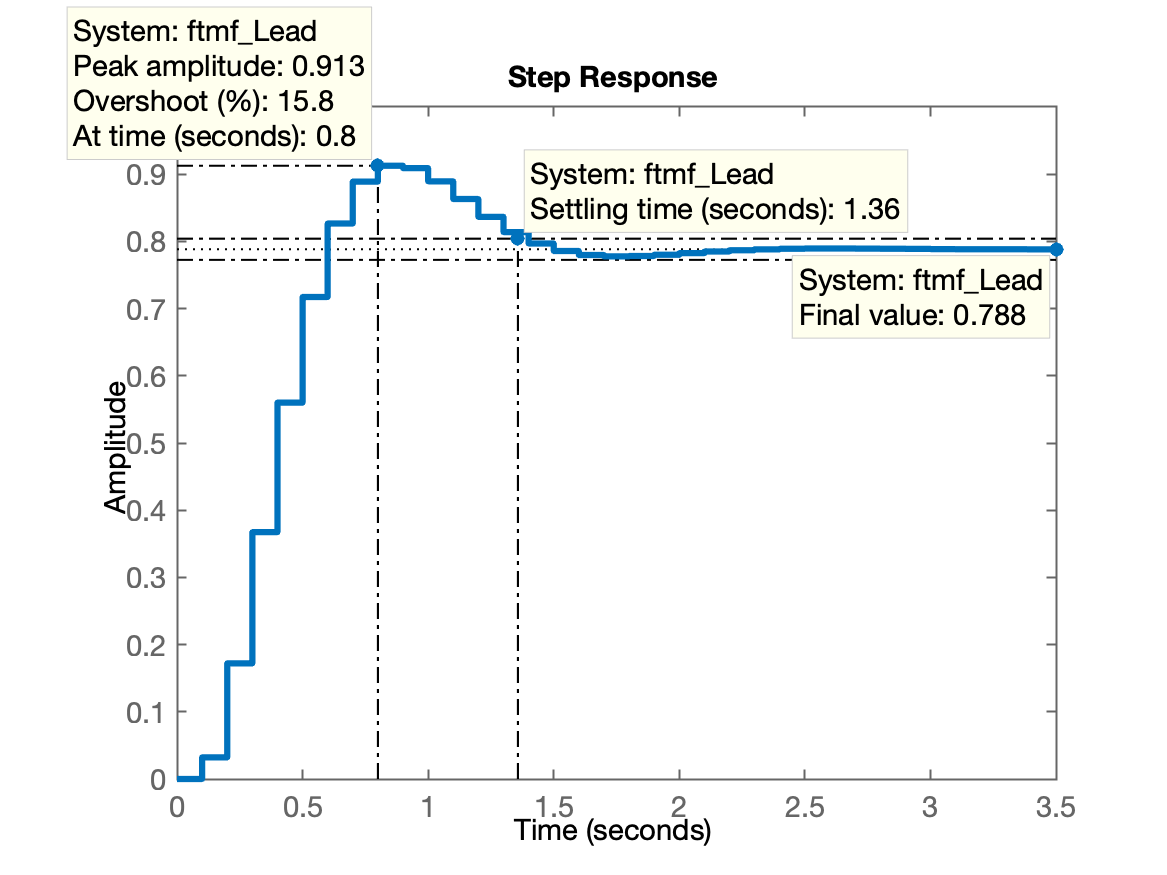
Notamos no gráfico que até foi possível atingir um segundos. Mas (como esperado), o erro é de quase 25% e o overshoot em relação à referência adotada (entrada degrau unitário) poderia ser aumentado até e o valor máximo (de pico) atingido, foi de 0,913. Isto significa que temos "espaço" para aumentar o ganho deste Lead.
Aumentando ganho de forma a reduzir erro em regime permanente do Lead (apesar do RL para este controlador, indicar que provavelmente o sofrerá um aumento):
xxxxxxxxxx>> K_Lead2=360; % esperando baixar o erro, eventualmente aumenta ts>> ftmf_Lead2=feedback(K_Lead2*FTMA_Lead, 1);>> figure; step(ftmf_Lead, ftmf_Lead2)E então as seguintes figuras são obtidas:
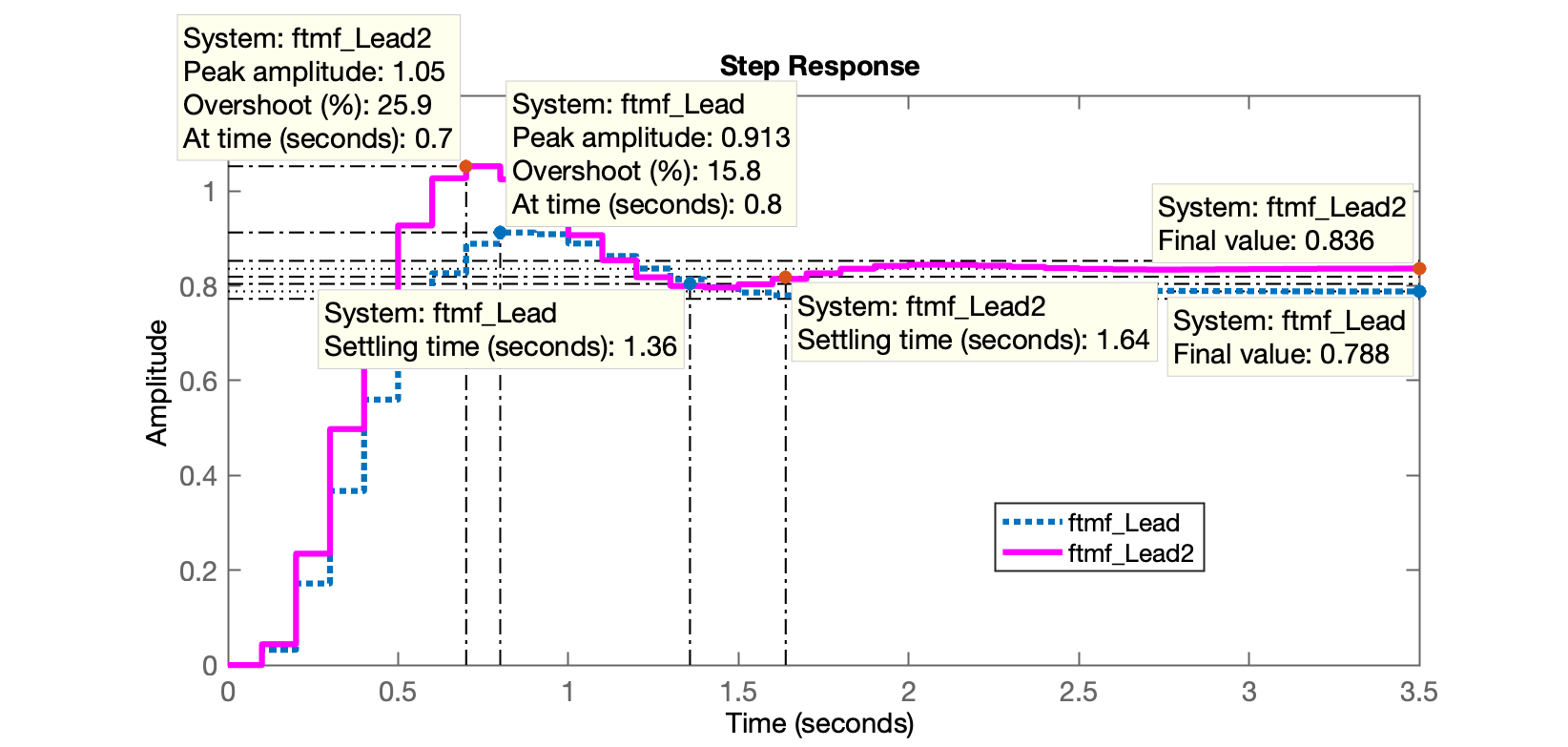
Como esperado, o overshoot aumentou (mas ainda estamos abaixo de ou ), o erro foi um pouco reduzido (eventualmente menos que o esperado), e o tempo de assentamento, aumentou ligeiramente para 1,64 segundos (contra 1,36 que ocorreu antes).
Obs.: um ajuste final deste Lead poderia ser obtido usando-se o APP Control System Designer do Matlab.
Fim