
Controle com Ação Derivativa
> Arquivo fonte: /Volumes/Macintosh_HD/Users/fernandopassold/Documents/UPF/Controle\_Auto\_3/Derivador/Controle\_Acao\_Derivativa.md (24/04/2018) >Derivador "Puro"
Seja:
no nosso caso,
A equação acima leva à:
ou:
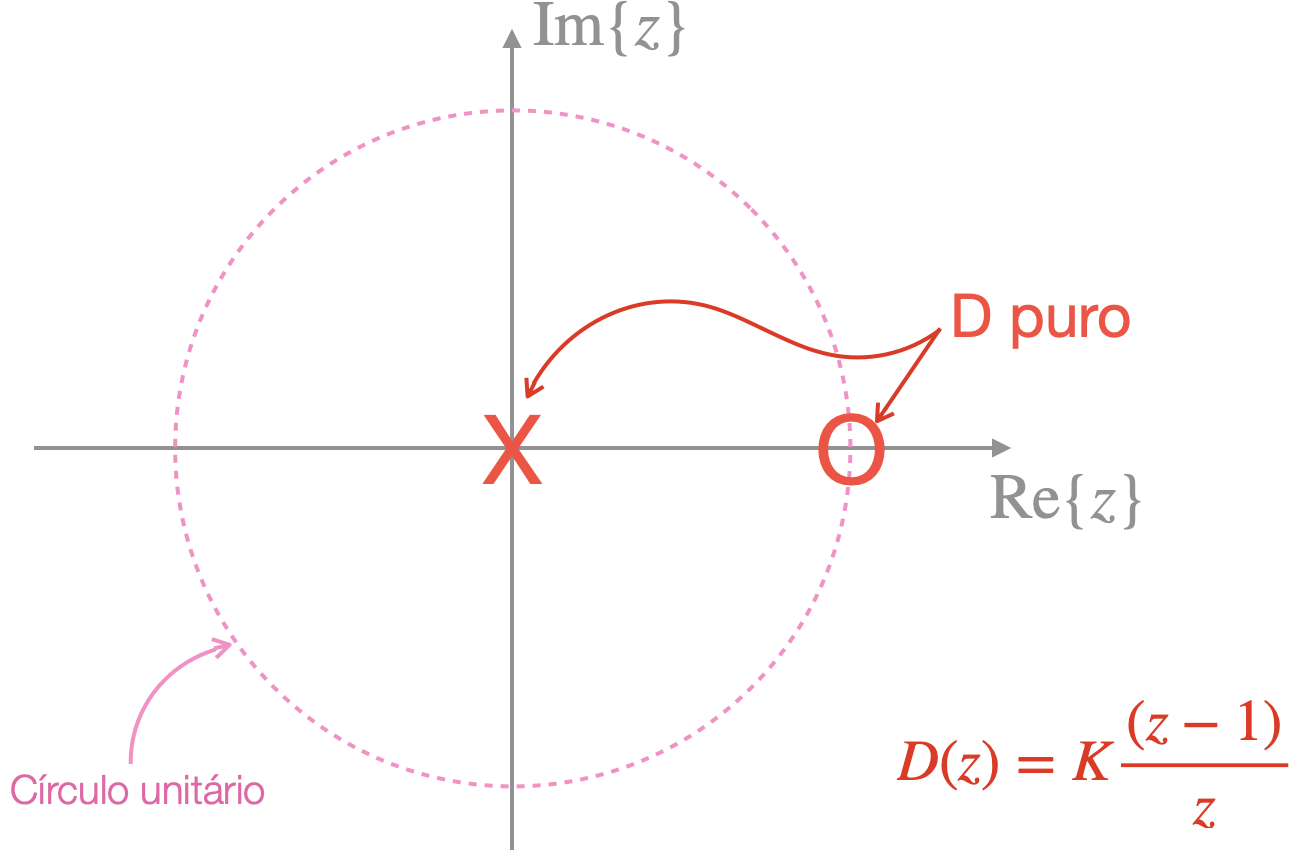
que rende: zero em
No plano-z este controlador pode ser visualizado como:
O problema é que um ação derivativa pura leva à:
que resulta no seguinte diagrama de Bode:
>> bode([1 0], 1)
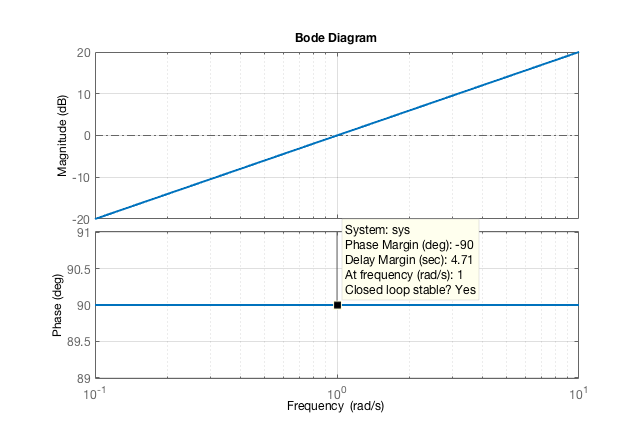
Ou seja, repare que o ganho só aumenta (e tende à
Amplificador Derivador
Na prática, um circuito derivador puro se poderia tentar realizar através do seguinte circuito usando amplificador operacional:
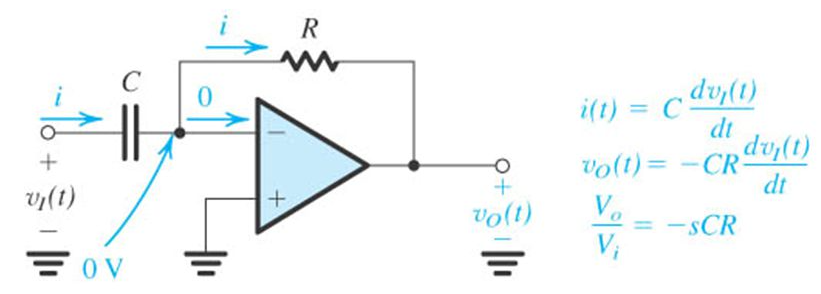
Fonte: The op-amp Differentiator - ppt video online download, Operational amplifier applications - WikiVisually
Em frequencias baixas a impedância do capacitor é praticametne
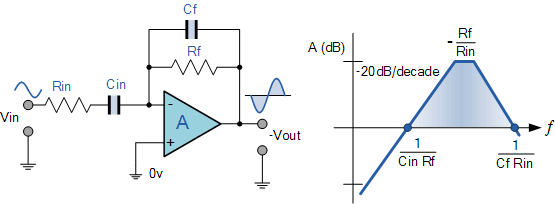
Já um circuito realizável seria algo como:
Efeito de Derivada sobre Sinal Ruidoso
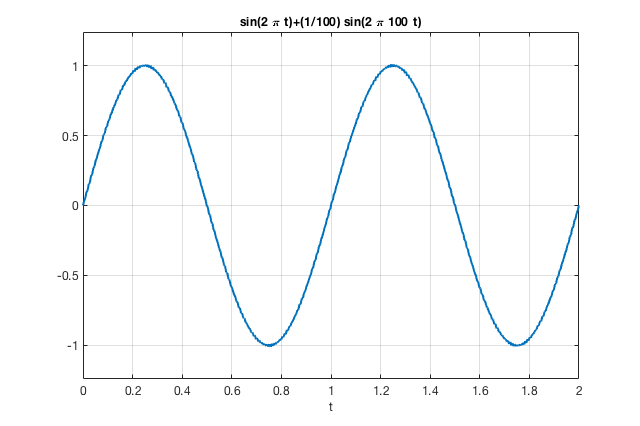
Suponha que o seguinte sinal está sendo amostrado:
Note na eq. anteriror que o ruído ocorre na frequência da rede elétrica e corresponde à apenas 1% da amplitude do sinal esperado -- o que significa que a princípio ele é praticamente negligenciável (imperceptível) -- veja gráfico à seguir:
>> ezplot( 'sin(2*pi*t)+(1/100)*sin(2*pi*100*t)',[0 2] ) % 2 ciclos do sinal esperado
>> grid
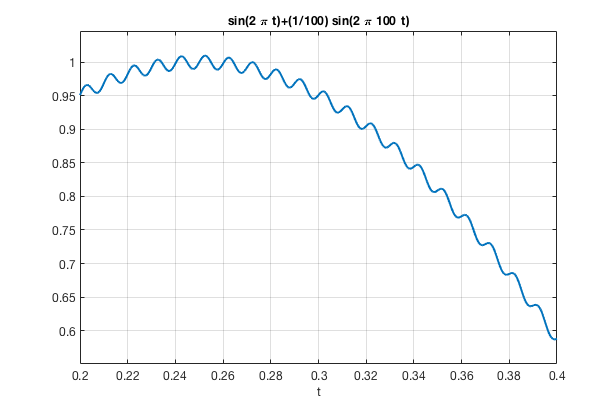
Um "zoom" sobre o sinal anterior permite visualizar o erro:
>> ezplot( 'sin(2*pi*t)+(1/100)*sin(2*pi*100*t)',[0.2 0.4] ) % zoom sobre o sinal anterior
>> grid
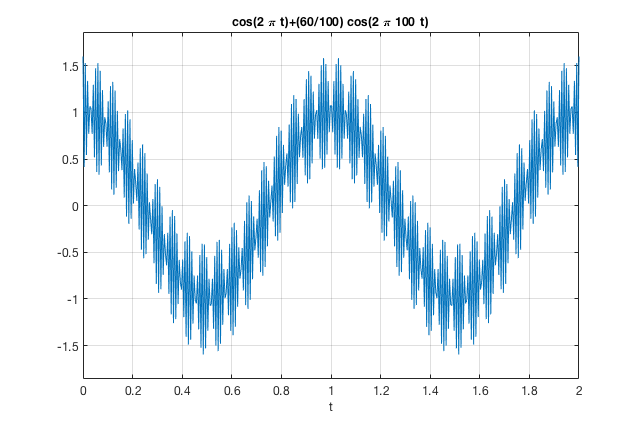
Note porém que derivada deste sinal rende:
Note agora que a amplitude do sinal derivado, amplificou (ressaltou) o ruído presente no sinal. A amplitudade do ruído que antes estava na faixa de 0,01 Vp agora passou para 0,6 Vp (ou seja, aumentou
Um gráfico do sinal deraivado
>> ezplot( 'cos(2*pi*t)+(60/100)*cos(2*pi*100*t)',[0 2] )
>> grid
Um "zoom" sobre a figura anterior permite "contemplar" melhor o efeito da derivada sobre um sinal ruidoso:
>> t=0.4:0.001:0.6; % zoom sobre a parte interessada
>> x=sin(2*pi.*t)+(1/100)*sin(2*pi*100.*t); % sinal + ruido
>> y=cos(2*pi.*t)+(60/100)*cos(2*pi*100.*t); % derivada do sinal com ruido
>> y2=cos(2*pi.*t); % derivada apenas do sinal esperado
>> figure;
>> plot(t,y,'b-', t,y2,'m--')
>> legend('d\dt Sinal com ruído', 'd/dt Sinal sem ruído')
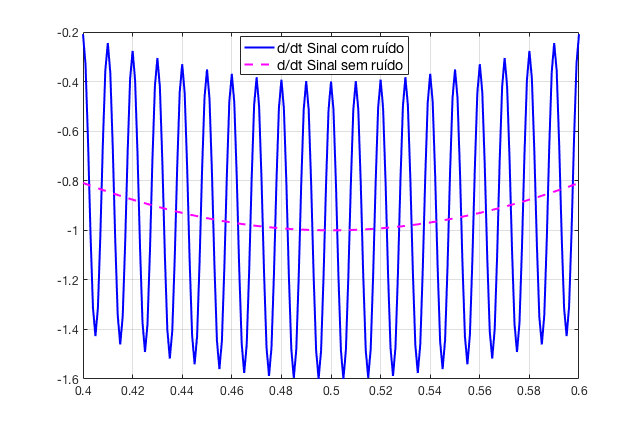
Conforme esperado, o próprio diagrama de Bode um um derivador puro indica que a amplitude de sinais de alta frequência será elevada proporcionalmente à sua frequência.
Derivador Puro Numérico
Mesmo usando um algoritmo digital para implementar a derivada, resulta em:
onde
Simulando sobre o sinal anterior, resulta em:
T=8E-4; % período de amostragem - Note que 1/(20*60) = 0.0008333
t=0:T:1; % zoom sobre a parte interessada
x=sin(2*pi.*t)+(1/100)*sin(2*pi*100.*t); % sinal + ruido
y=cos(2*pi.*t)+(60/100)*cos(2*pi*100.*t); % derivada do sinal com ruido
y2=cos(2*pi.*t); % derivada apenas do sinal esperado
% Simulando uma derivada numerica no vetor y3
u=length(t); % retorna qtdade de pontos do vetor t (amostras)
y3=zeros(1,u); % inicializando vetor da derivada numerica
for i = 2:u
y3(i) = ( x(i) - x(i-1) ) / T;
end
figure;
plot(t,y,'b-', t,y2,'m--', t,y3,'go-')
legend('d\dt Sinal com ruído', 'd/dt Sinal sem ruído',...
'Derivada Numerica')
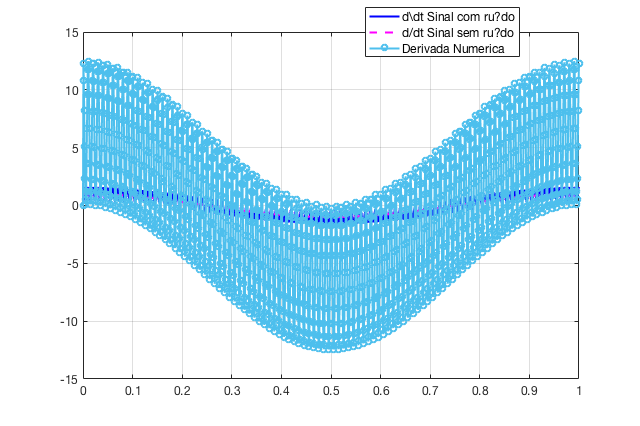
Um "zoom" sobre a figura anterior rende:
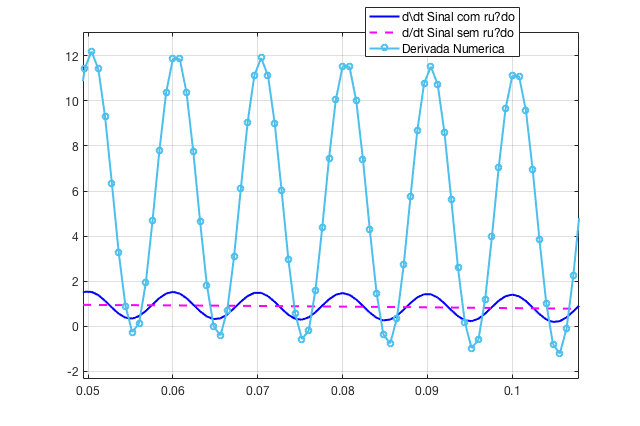
O resultado está londe do esperado. E piora se considerarmos que sobre o resutlado do gráfico falta aplicar o ganho Derivativo
Solução: ?
Uso de Filtro Passa Baixas
Notamos que não é interessante derivar a parte de frequencias elevadas (ruído) de um sinal. Então a solução é aplicar um Filtro Passa Baixas, antes de derivar o sinal desejado.

A equação diferencial de um filtro passa-baixas (FPB) de 1a-ordem é dada por:
onde
Para
Na prática sugere-se
Note que o emprego de FPB numa malha de controle, inevitavelmente implica na introdução de um significativo atraso dinâmico (no tempo).
A função transferência do filtro seria:
ou como
A amplitude fica caracterizada por:
e a fase é caracterizada por:
Se
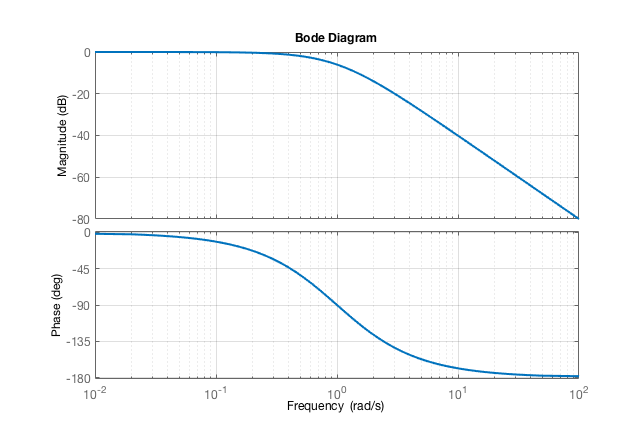
O que rende os seguintes diagramas de Bode:
>> figure; bode(1, [1 1]); grid
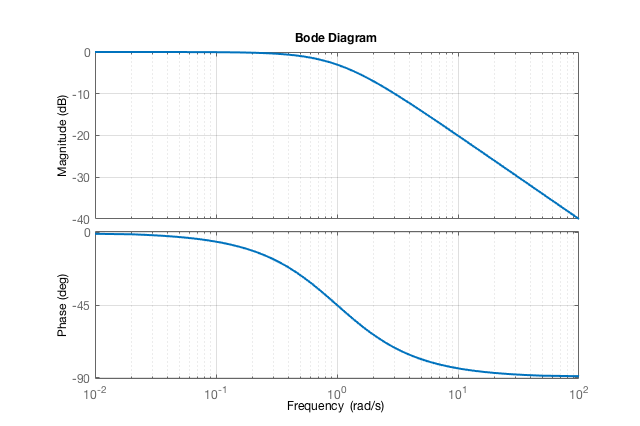
Por exemplo:
>> 20*log10(0.1)
ans =
-20
>>
Filtro Passa-Baixas RC
Um simples filtro passa-baixas RC é mostrado na próxima figura:
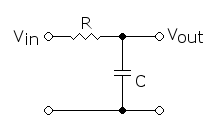
Para este circuito:
A frequência do filtro deveria esta na faixa:
Filtro Exponencial Digital
Seja um filtro do tipo:

Uma derivada numérica simples se consegue através de:
Note que se aproxima da equação do filtro analógico de 1a-ordem:
que resultaria neste caso em:
trabalhando a equação anterior à fim de isolar
Podemos criar a variável
e então:
e assim chegamos a um formato mais simples de equação para o filtro digital exponencial de 1a-ordem:
onde:
| Note que: | ||
|---|---|---|
| Se |
||
| Se |
Filtro exponencial duplo (ou de 2a-ordem)
Pode ser formado pelo cascateamento de 2 filtros de 1a-ordem:

Derivando as equações, teremos:
Se
Note que existe uma vantagem deste filtro sobre o anterior de 1a-ordem: este filtro atenua mais fortemente ruídos de alta frequencia, especialmetne se
Este filtro resulta em algo semelhante à:
Cujo diagrama de Bode resulta:
>> figure; bode(1, conv( [1 1], [1 1] ) ); grid
Note: corte de 40 db/déc!
>> 20*log10(0.01/1)
ans =
-40
Filtro de Média Móvel
Neste caso se aplica simplesmente a equação:
que representa a média dos últimos
Esta equação pode ser reescrita como:
mesclando as 2 últimas equações obtemos:
Problema Sugerido
Os 3 filtros anteriores poderiam ser aplicados sobre este tipo de sinal:
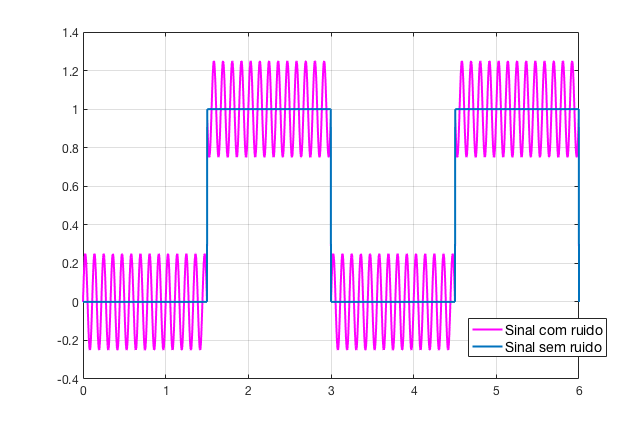
- uma onda quadrada (sinal esperado) oscilando entre 0,0 e 1,0 Volts à frequência de
, acompanhado de um ruído (senoide) oscilando na frequência de 9 Hz com amplitude de 0,25 Vp. Simular alguns casos:
- Filtro analógico de 1a-ordem com
minutos; - Filtro analógico de 1a-ordem com
minutos; - Filtro digital exponencial de 1a-ordem com
minutos; e usando período de amostragem minutos; - Filtro digital exponencial de 1a-ordem com
minutos; e usando período de amostragem minutos; - Filtro de média móvel com
(ainda se deve perceber ruído); - Filtro de média móvel com
(o ruído praticamente some).
Alguns resultados que poderiam ser obtidos:
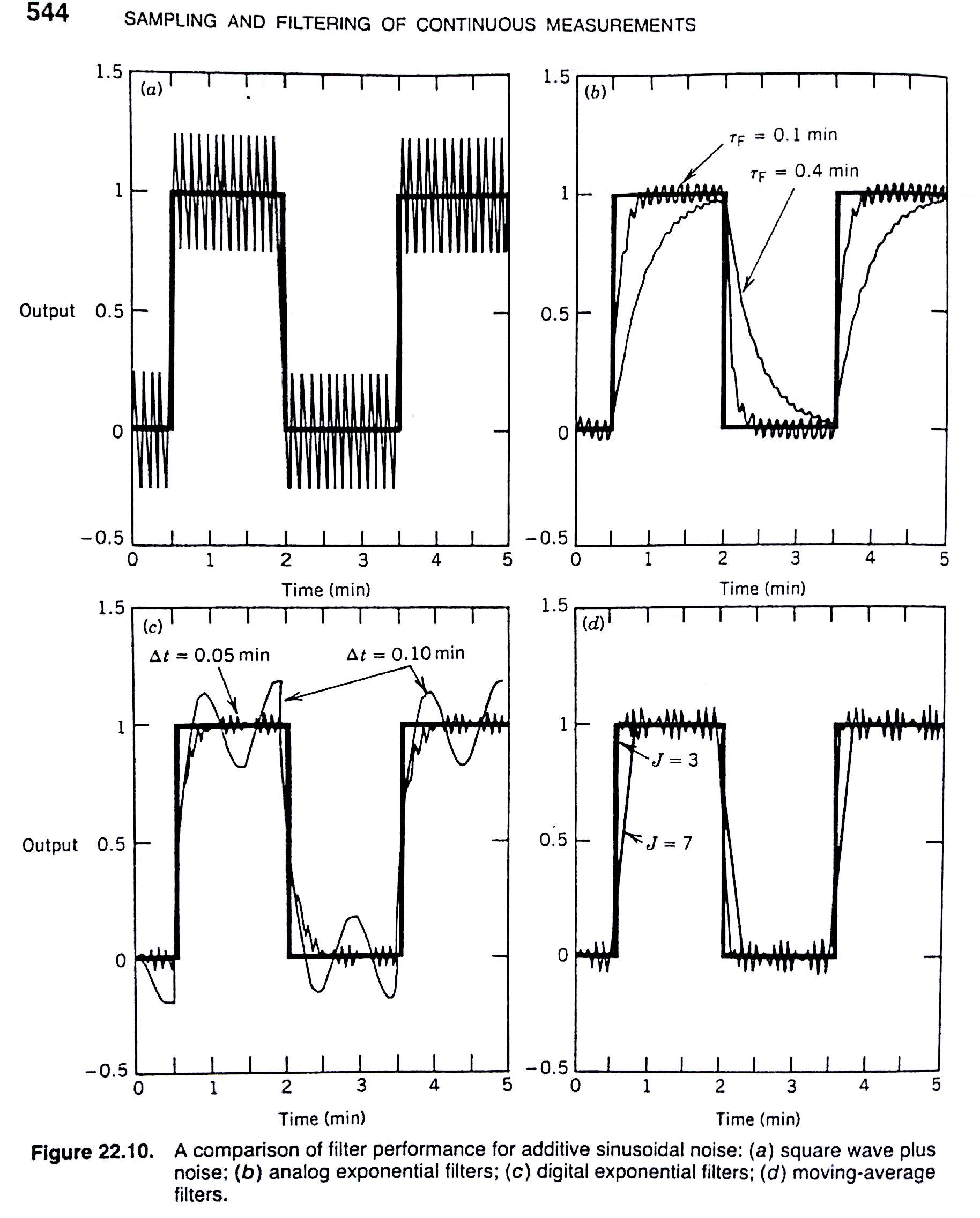
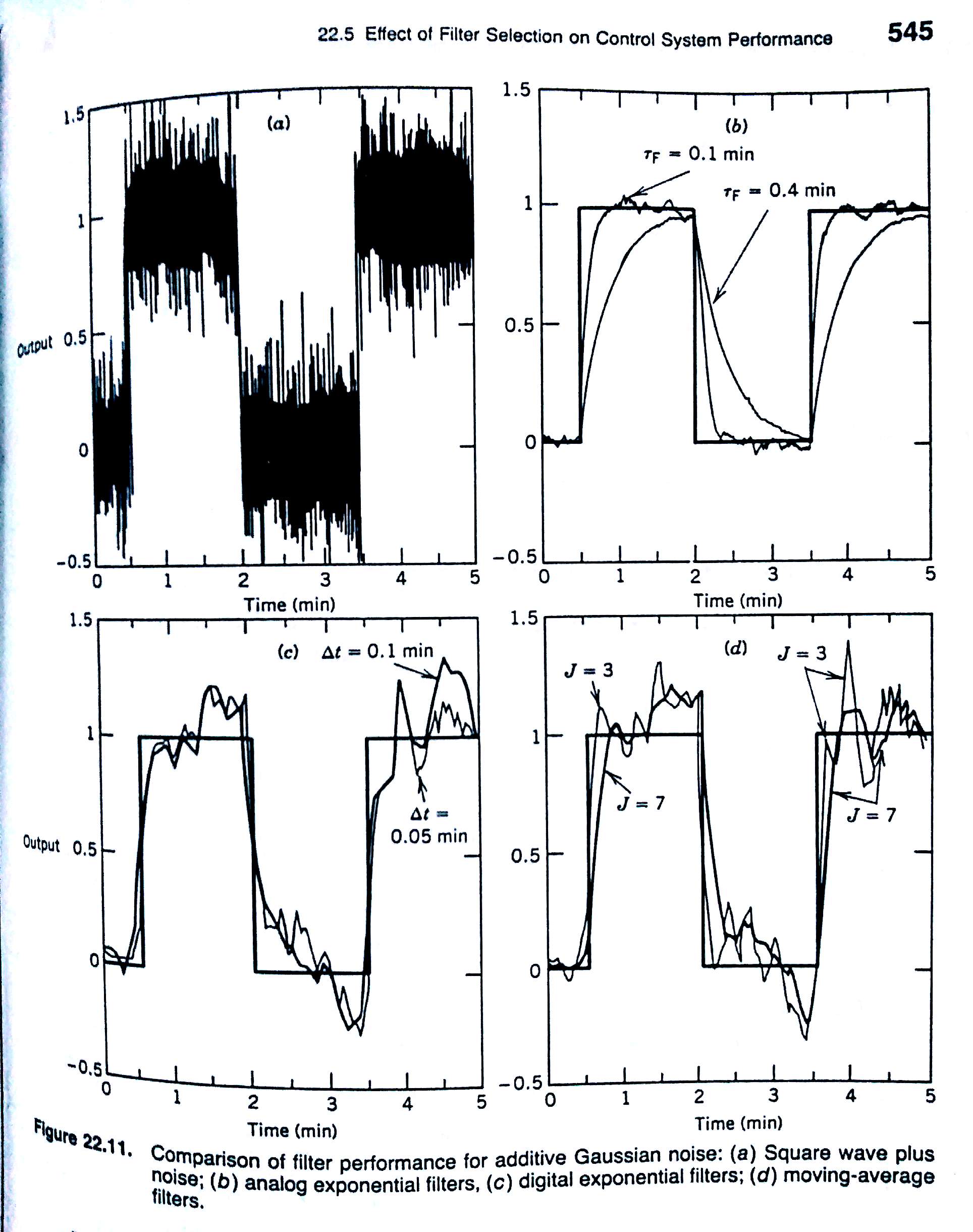
Ref.: Process Dynamics and Control 4th Edição, por Dale E. Seborg (Author), Thomas F. Edgar (Author), Duncan A. Mellichamp (Author), Francis J. Doyle III (Author), Wiley; 4ª edição (13 setembro 2016), 512 páginas, ISBN-10: 1119285917, ISBN-13 : 978-1119285915.
Segue script adotado no MATLAB que gerou figura com ruido:
% Problema sugerido - controladores ação derivativa
% Fernando Passold, 24/04/2018
T1=1/(0.05*60) % 1o-periodo de amostragem
T2=1/(0.1*60) % 2o-periodo de amostragem
% Simulando os primeiros 2 ciclos de uma onda
% quadrada, f = 1/3 (Hz)
% amostrar este sinal 20 x f
disp('Onda quadrada oscilando à:')
f = 1/3
fs = 20*20;
T_square = 1/f;
T = 1/fs;
k=0:T:2*T_square;
u=length(k); % qtadade de amostras geradas
square=zeros(1, u);
for i=1:u
t = k( i ); % calculando tempo real em segundos
if ( t > T_square/2 )&&( t < T_square)
square(1, i) = 1;
end
if ( t > (T_square + T_square/2) )&&( t < 2*T_square)
square(1, i) = 1;
end
end
% Sobrepondo a senoide (ruido) de 0,25 Vp, freq = 9 Hz
f_N = 9;
T_N = 1/f_N;
for i=1:u
t = k( i );
noise( i ) = 0.25*sin(2*pi*f_N*t);
signal( i ) = square( i ) + noise( i );
end
plot(k, signal,'m-', k, square)
legend('Sinal com ruido','Sinal sem ruido')
grid
> Arquivo fonte: /Volumes/Macintosh_HD/Users/fernandopassold/Documents/UPF/Controle\_Auto\_3/Derivador/Controle\_Acao\_Derivativa.md (Abril/2018)
Fernando Passold, Abril/2018