Projeto de Controladores Digitais
Recuperando dados da aula passada (de 07/04/2025 ), arquivo: [dados.mat]:
xxxxxxxxxx>> diary aula_140402025.txt>> load dados % recuperar dados da aula passadaContinuando da aula passada. Faltou integrador por "Atraso de Fase", ou simplemente "Lag". Sugere-se ver antes: Projeto de Lag (com teoria) (PDF).
Projeto do Lag
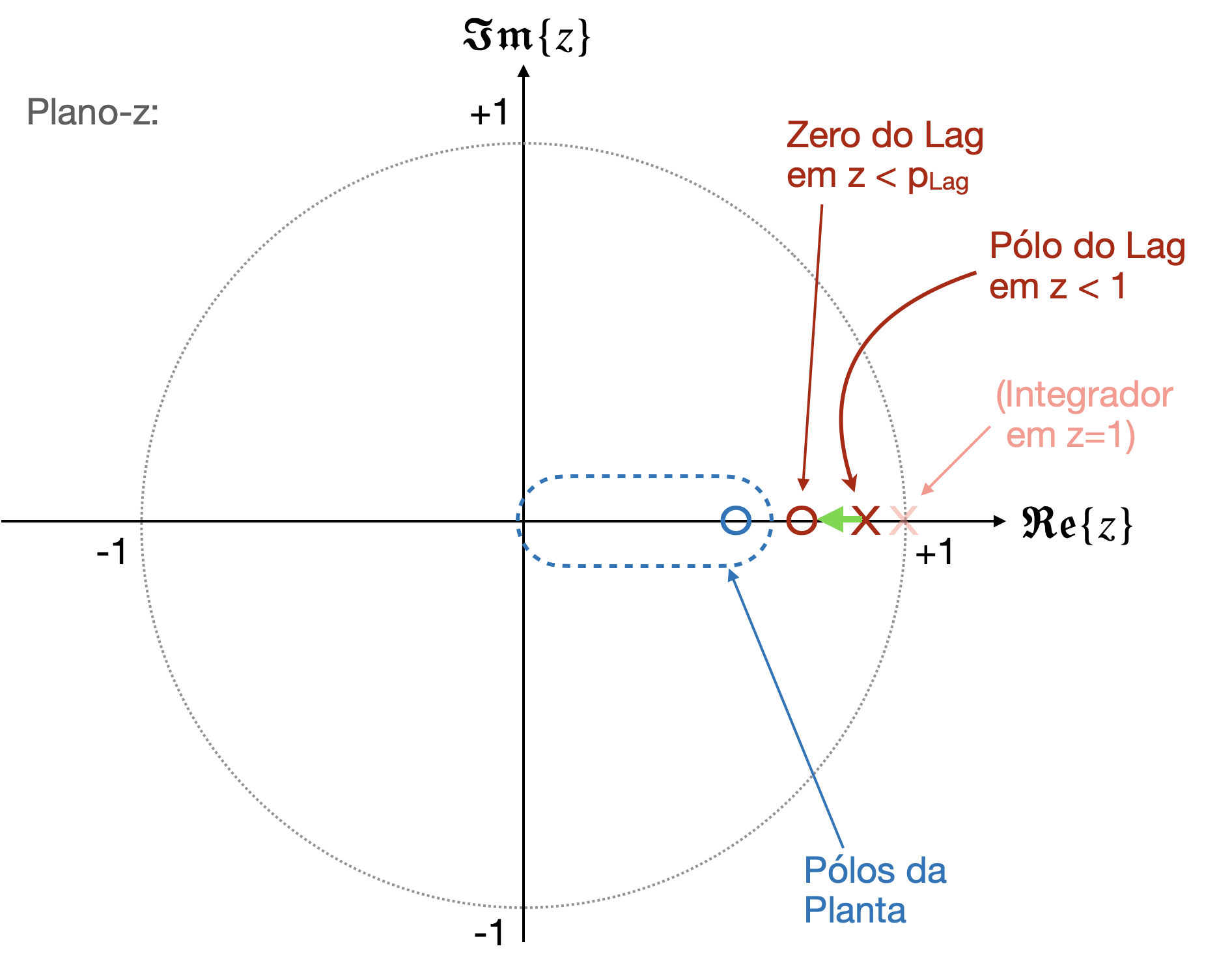
Para este tipo de controlador, seu pólo "sai" do círculo unitário (). Considerar que quanto maior o afastamento, menor sua ação algo integradora (aumenta o erro de regime permanente), passando a atuar mais como um simples filtro passa-baixa. O zero deste controlador obviamente deve estar localizado no plano-z antes do pólo, mas muito provavelmente antes do pólo mais lento da planta à ser controlada (maior dominânica na resposta). Um esboço rápido no plano-z revela algo como:
Lembrando da eq. da planta, para alocar pólos e zeros para o controlador Lag:
xxxxxxxxxx>> zpk(BoG)ans = 0.00012224 (z+2.747) (z+0.1903) -------------------------------- (z-0.9048) (z-0.8187) (z-0.3679) Sample time: 0.1 secondsDiscrete-time zero/pole/gain model.>> p_Lag=(1+0.9048)/2p_Lag = 0.9524Localizando o zero do Lag no mesmo local do zero do PI1a realizado na aula anterior:
xxxxxxxxxx>> C_Lag1=tf( [1 -0.92], [1 -0.95], T )C_Lag1 = z - 0.92 -------- z - 0.95 Sample time: 0.1 secondsDiscrete-time transfer function.>> ftma_Lag1=C_Lag1*BoG;>> rlocus(ftma_Lag1)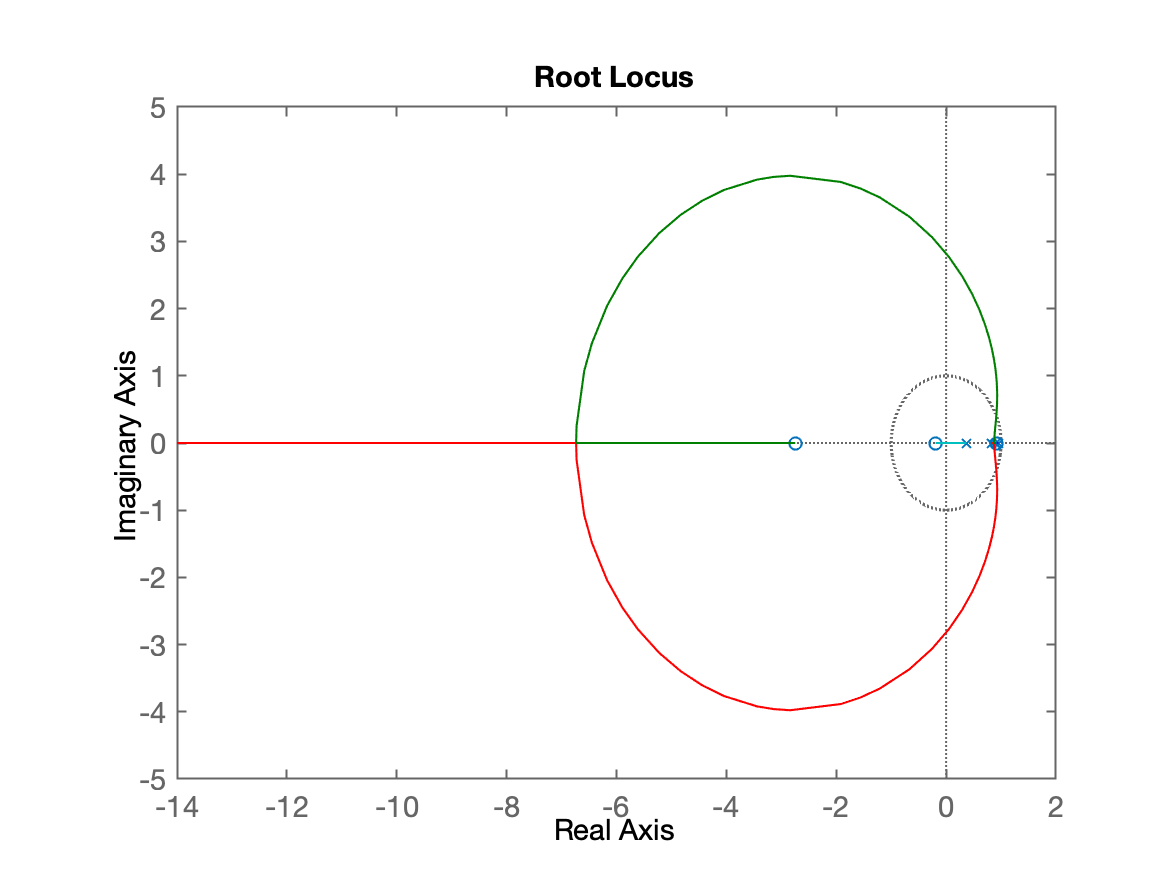
Realizando o zoom na região de interesse:
xxxxxxxxxx>> axis([0.6 1.1 -0.6 0.6])>> hold on; zgrid(zeta,0) % acrescentnado linha guia do zeta para OS=15%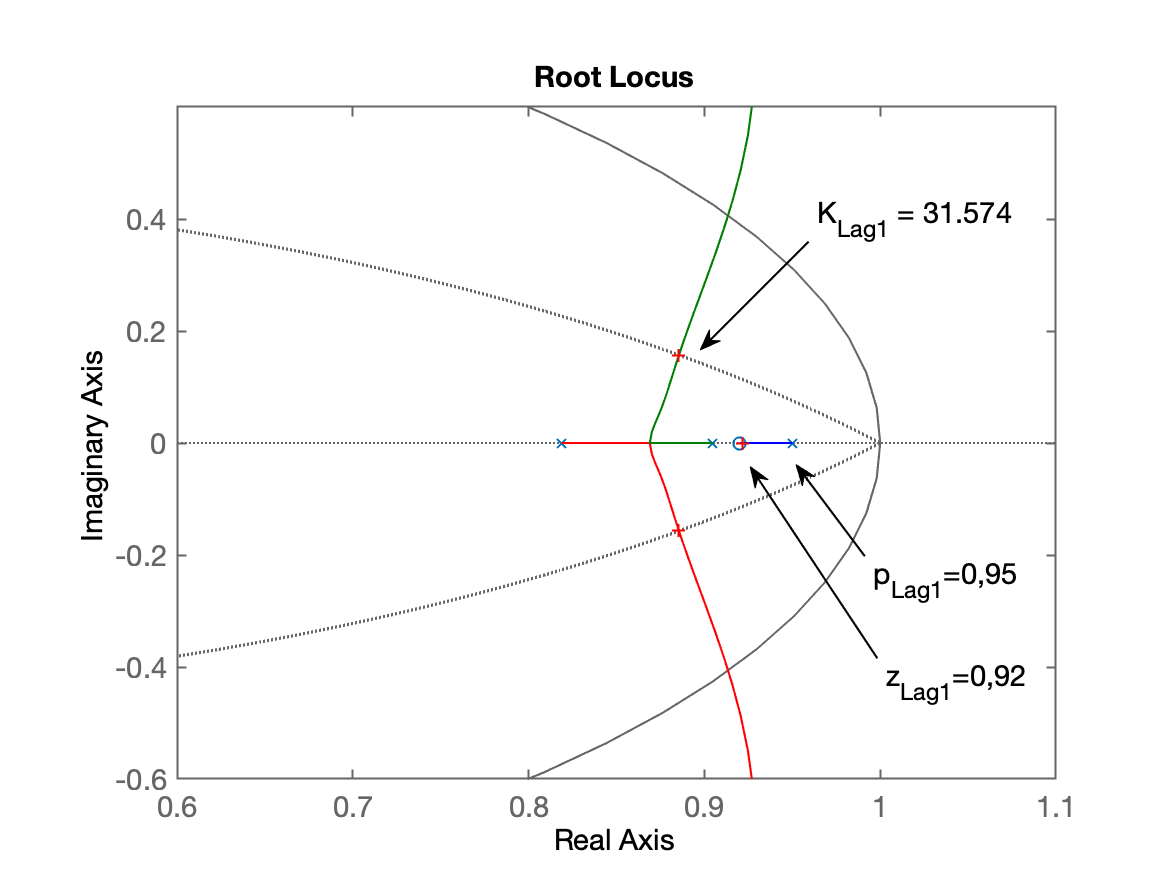
Terminando projeto:
xxxxxxxxxx>> [K_Lag1,polosMF]=rlocfind(ftma_Lag1)Select a point in the graphics windowselected_point = 0.88614 + 0.15604iK_Lag1 = 31.574polosMF = 0.92173 + 0i 0.88544 + 0.15611i 0.88544 - 0.15611i 0.34499 + 0i>> ftmf_Lag1=feedback(K_Lag1*ftma_Lag1, 1);>> figure; step(ftmf_PI1a, ftmf_Lag1)>> legend('PI1a', 'Lag1') % já comparando resposta com PI1a feito antes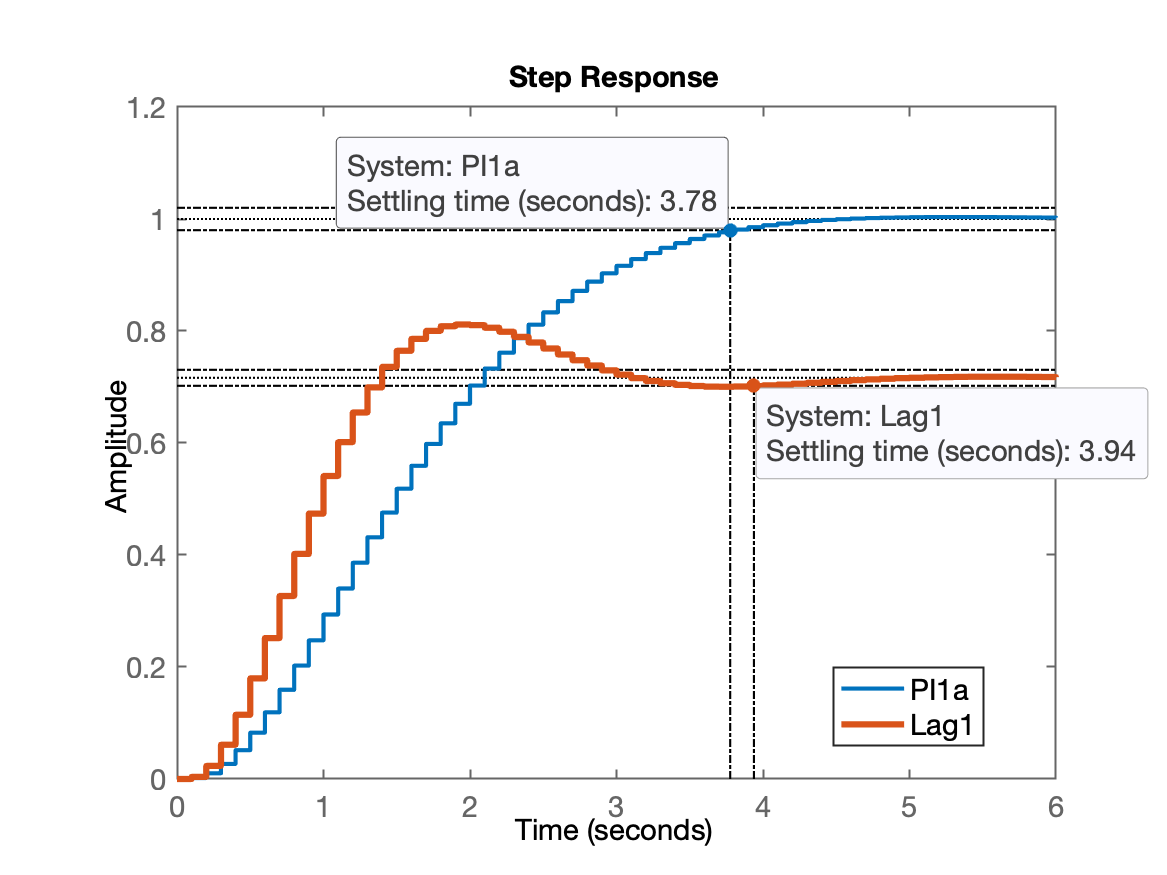
Calculando erro:
xxxxxxxxxx>> erro_Lag1=((1-dcgain(ftmf_Lag1))/1)*100erro_Lag1 =28.362
Realizando o projeto melhorado do "Lag2", usando o App Control System Designer.
Projeto do Lag2
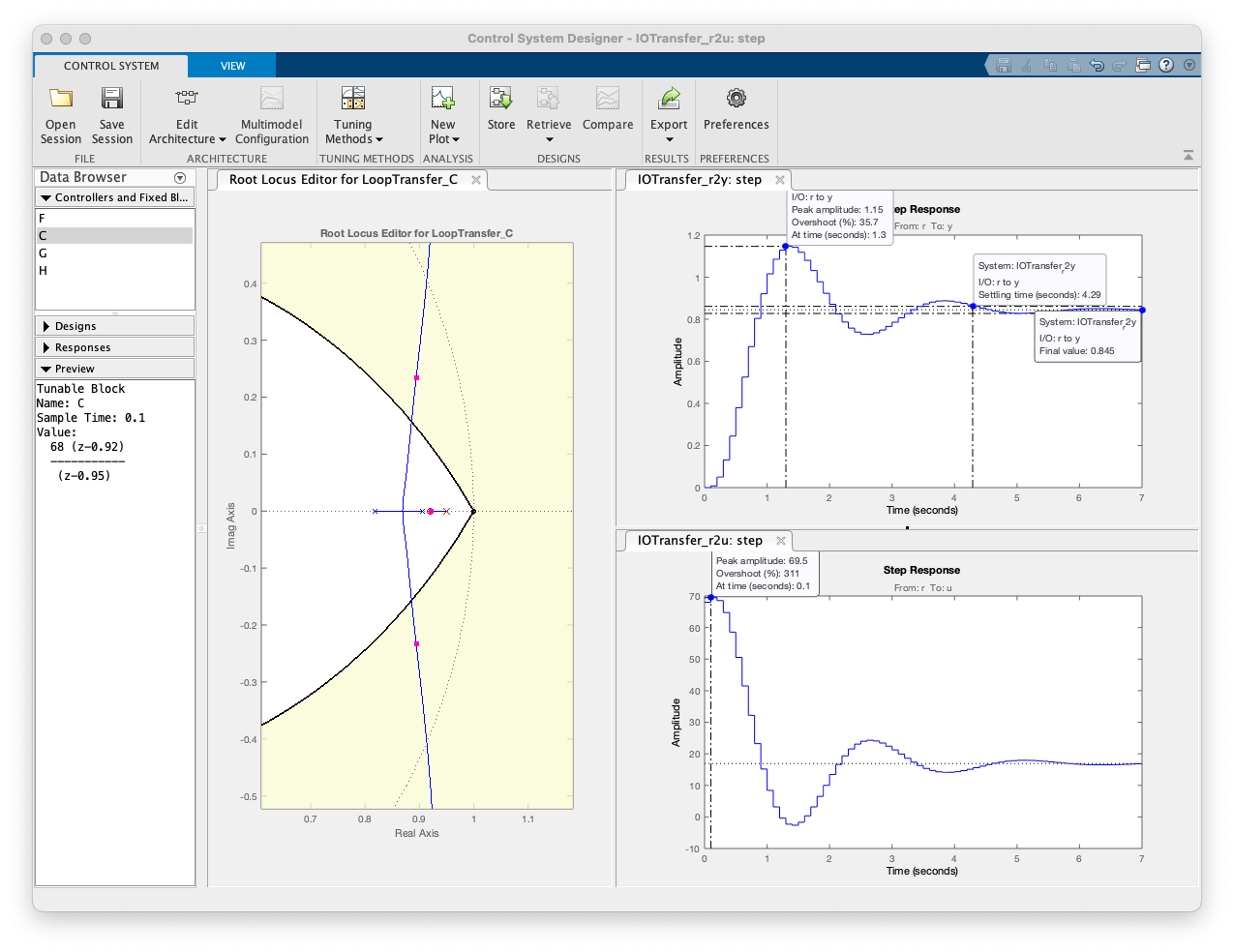
Repare que antes poderiámos ter ampliado o ganho do Lag1 para forçar (em relação à referência: entrada degrau unitário):
xxxxxxxxxx>> zpk(C_Lag1b)ans = 68 (z-0.92) ----------- (z-0.95) Name: CSample time: 0.1 secondsDiscrete-time zero/pole/gain model.Projeto do controlador até este ponto:
Melhorando este controlador...
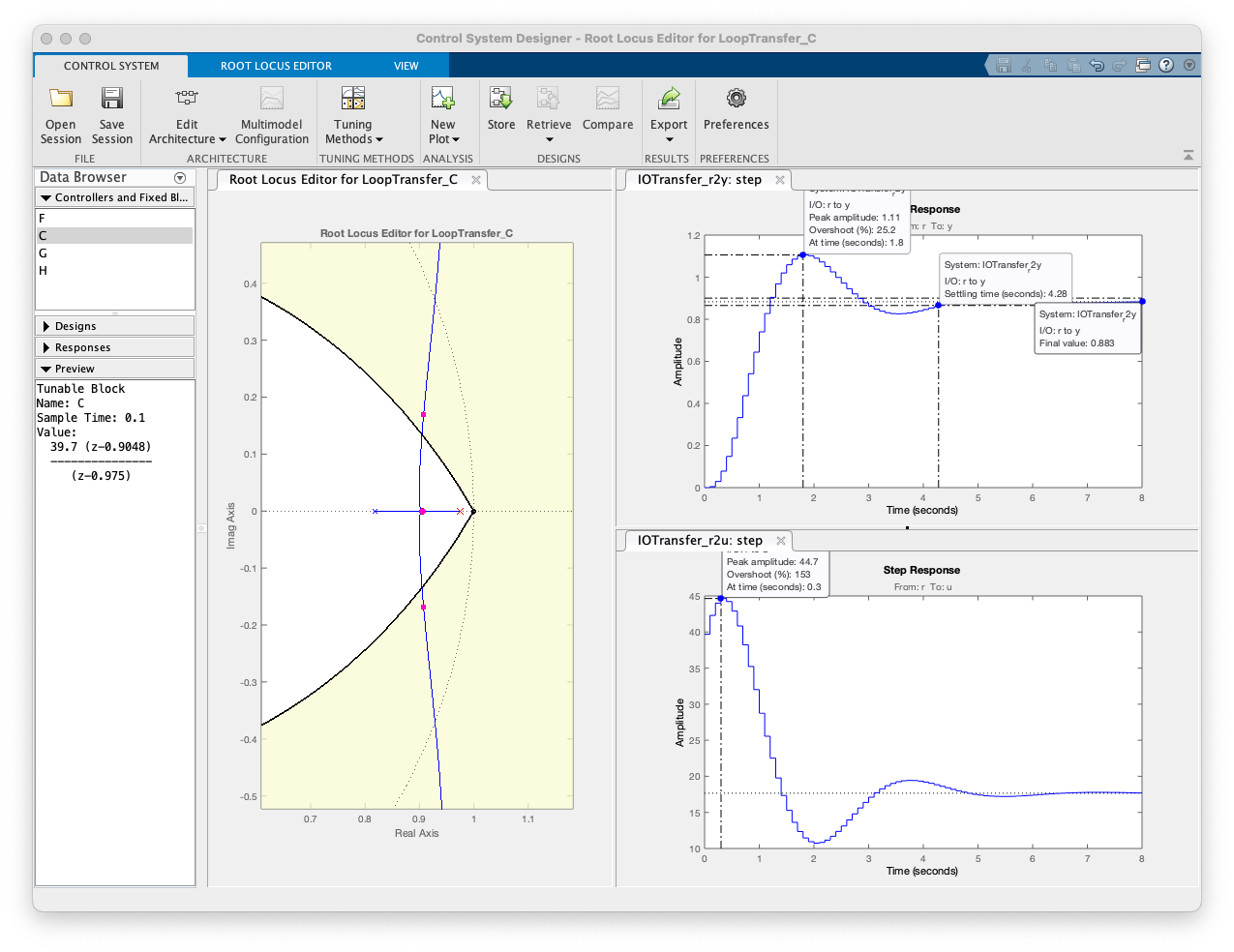
Equação do Lag2:
xxxxxxxxxxzpk(C_Lag2)ans = 39.7 (z-0.9048) --------------- (z-0.975) Name: CSample time: 0.1 secondsDiscrete-time zero/pole/gain model.Se o ganho deste controlador for reduzido para , reduzimos o para 3,79 segundos, mas o erro em regime permanente aumenta para quase 20% ().
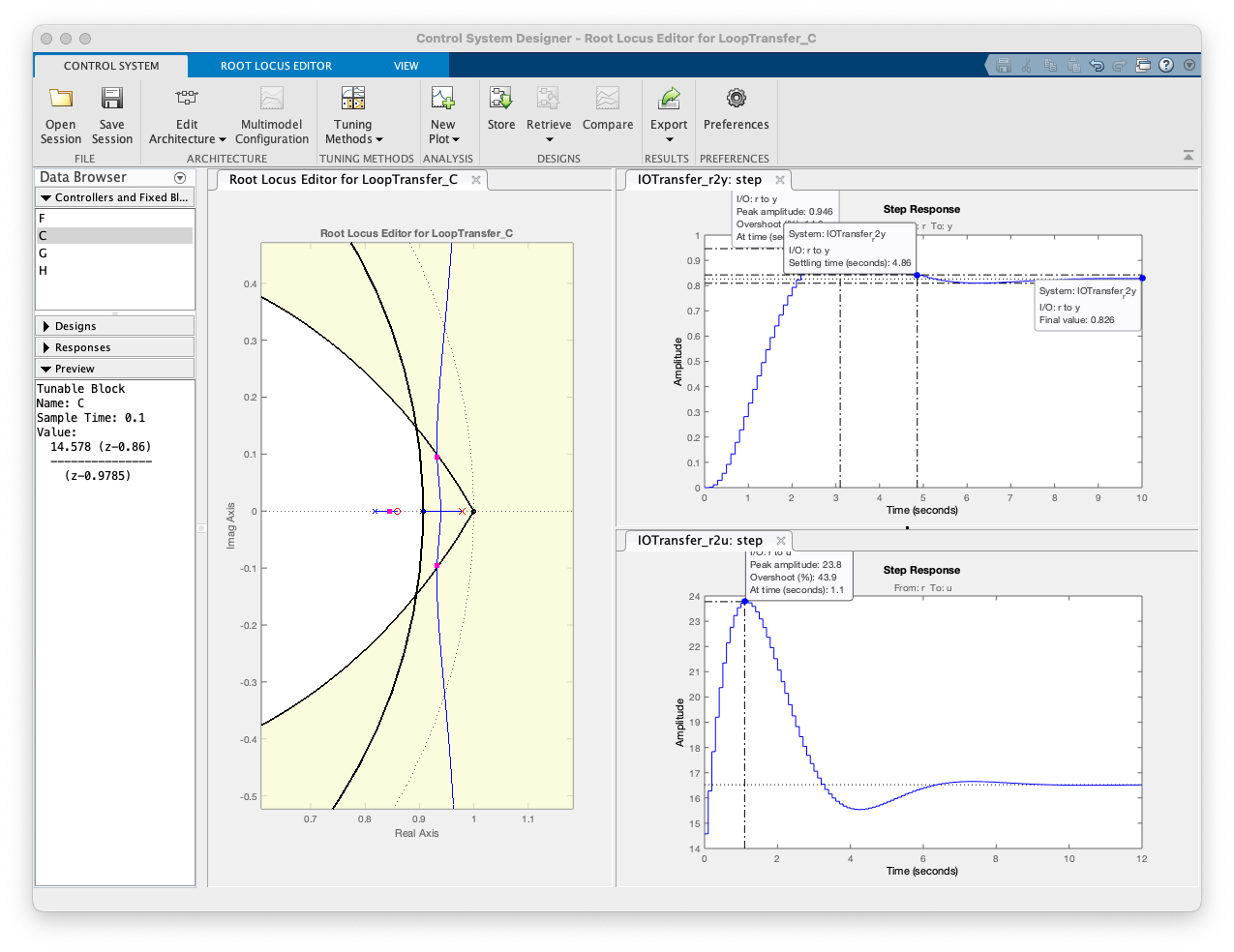
Tentando outro Lag: o "Lag3", mas note que aumenta às custas de erro mais baixo:
Lag Usando Contribuição Angular
O script find_polo_zero_d.m permite definir um controlador usando contribuição angular para terminar de definir o pólo ou zero que falta num controlador.
xxxxxxxxxx>> help find_polo_zero_d find_polo_zero_d.m Rotina de contribuicao angular para descobrir onde localizar polo ou zero dependendo do local desejado para os polos de MF - no plano-z (controle digital) Uso: Esta rotina ja' espera uma tf de nome "ftma_aux" onde: ftma_aux(z)=C(z)*BoG(z); e onde: C(z) esta' parcialmente fornecido, ou ja' contendo zero(s) ou ja' contendo polo(s) A rotina pergunta durante a execucao se a ideia e' determinar o local de um zero ou de um polo do controlador. Fernando Passold, em 14/10/2020, 20/10/2020>> Neste caso, primeiro devemos "montar" uma função transferência auxiliar para definir o controlador, no caso um "Lag" onde inicialmente arbitramos o local do seu pólo em , criando a variável C_aux e depois calculamos a variável ftma_aux:
xxxxxxxxxx>> C_aux=tf( 1, [1 -0.95], T ) % não esquecer o terceiro parâmetro T = período de amostragem>> ftma_aux=C_aux*BoG;>> zpk(ftma_aux) % verificando se está tudo corretoans = 0.00012224 (z+2.747) (z+0.1903) ----------------------------------------- (z-0.95) (z-0.9048) (z-0.8187) (z-0.3679) Sample time: 0.1 secondsDiscrete-time zero/pole/gain model.>> Finalmente executando o script find_polo_zero_d.m, ocorre:
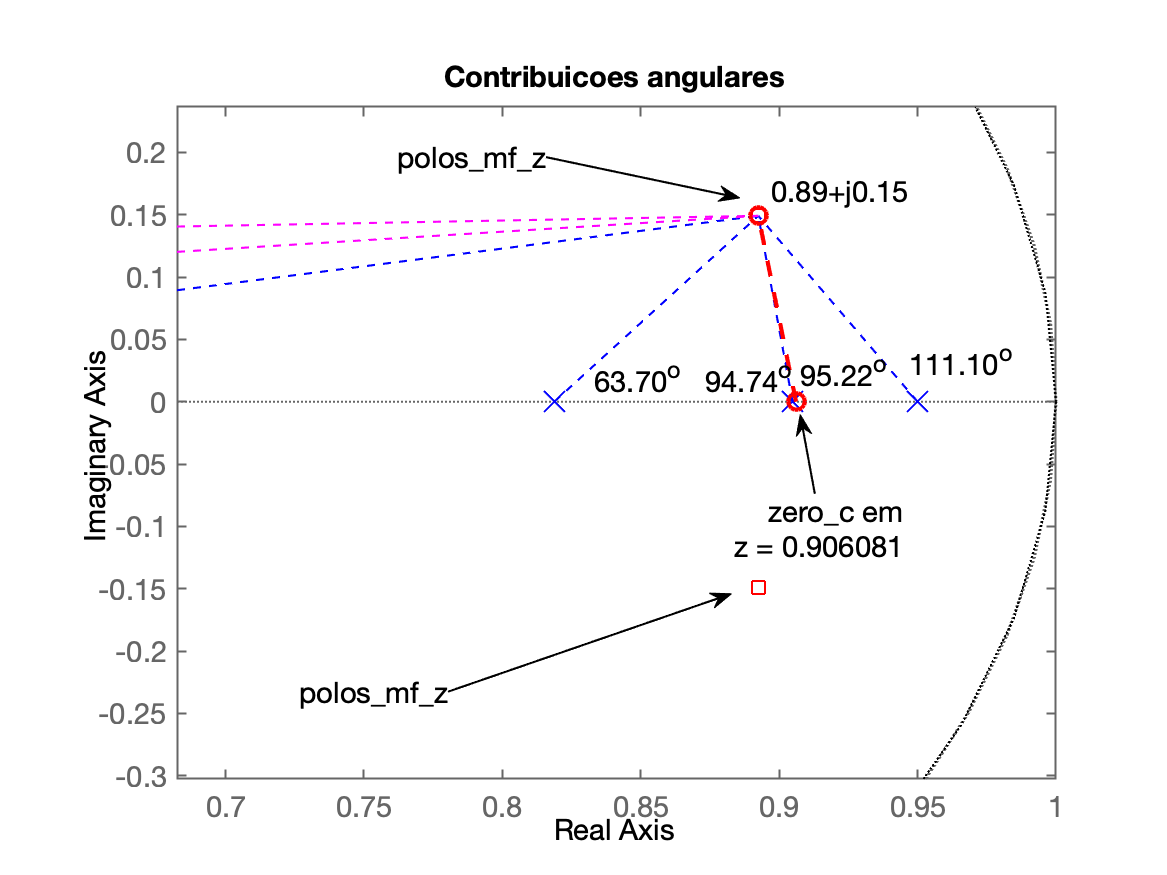
xxxxxxxxxx>> find_polo_zero_dOvershoot desejado (em %): ? 15ts_d (settling time desejado): ? 4Polos (desejados) de MF em: $z = 0.892459 \pm j0.149155$ (ou $0.90 \angle \pm 9.49^o$)Calculando angulos dos polos: Polo 1 em $z= 0.95$ --> angulo: $111.10^o$ Polo 2 em $z= 0.904837$ --> angulo: $94.74^o$ Polo 3 em $z= 0.818731$ --> angulo: $63.70^o$ Polo 4 em $z= 0.367879$ --> angulo: $15.87^o$Soma angular dos polos: $285.41^o$Calculando angulos dos zeros: Zero 1 em $z=-2.74711$ --> angulo: $2.35^o$ Zero 2 em $z=-0.190308$ --> angulo: $7.84^o$Soma angular dos zeros: $10.19^o$Determinar: [p]=polo ou [z]=zero do controlador: ? zAngulo requerido para zero do controlador: $95.22^o$O zero do controlador deve estar em:`zero_c` em $z = 0.906081$Eq. da ftma(z) com controlador --> `ftma`:ans = 0.00012224 (z+2.747) (z-0.9061) (z+0.1903) ------------------------------------------ (z-0.95) (z-0.9048) (z-0.8187) (z-0.3679) Sample time: 0.1 secondsDiscrete-time zero/pole/gain model.>> Note que o script find_polo_zero_d.m acaba gerando além das informa~çaoes numéricas, uma primeira janela gráfica mostrando a contribuição angular e uma segunda janela gráfica mostrando o RL final considerando a do sistema com o controlador recém projetado.
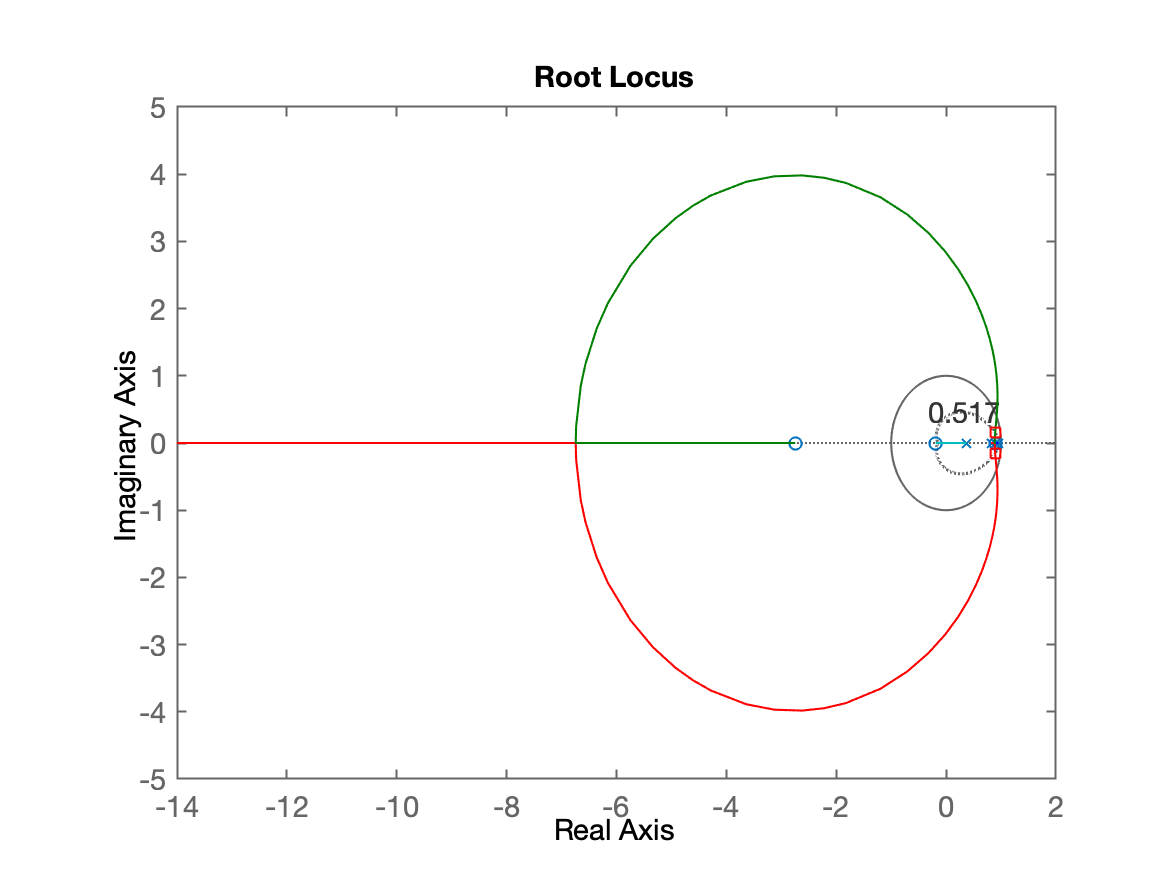
Um zoom no RL anterior permite visualizar:
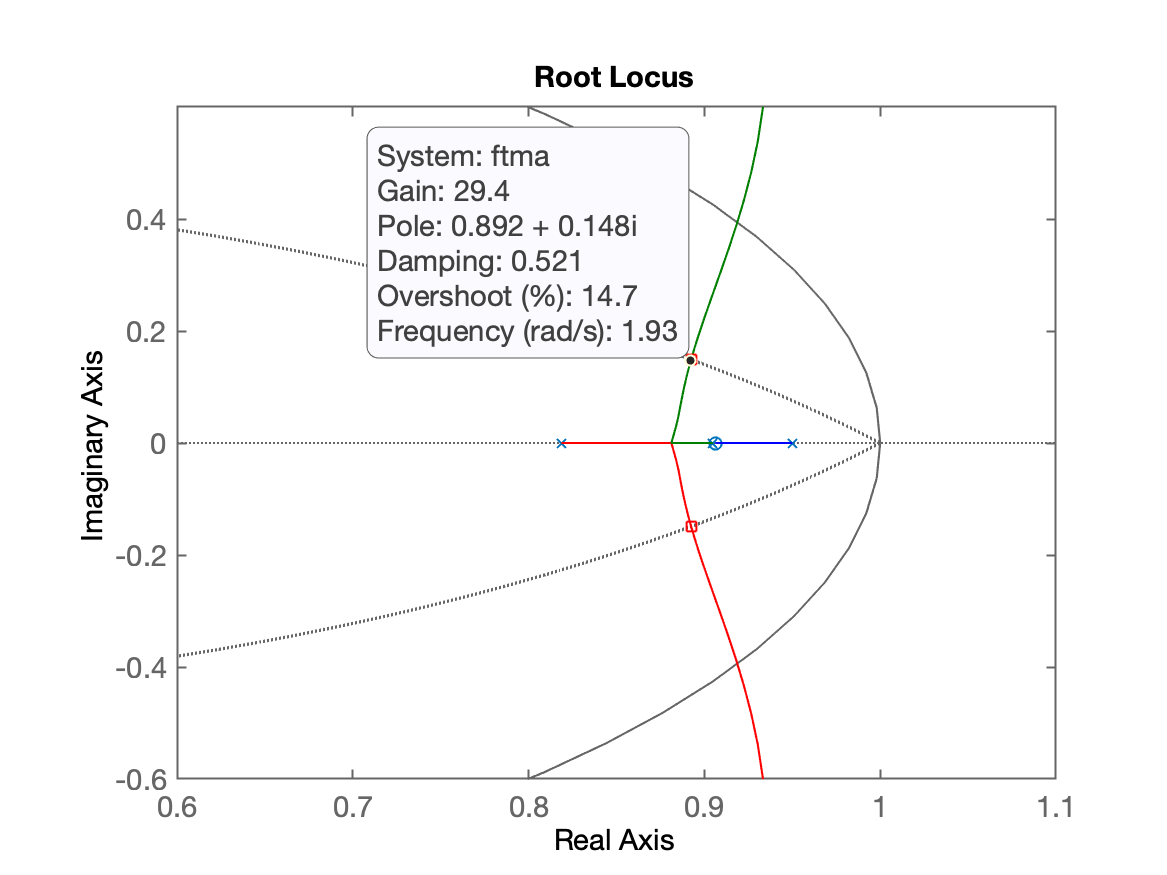
O zero ou pólo que este script ajudou a encontrar se encontra na variável polo_c ou zero_c, respectivamente para o caso do pólo ou zero que faltou definir.
No caso acima:
xxxxxxxxxx>> zero_czero_c = 0.90608Neste caso, a eq. final deste controlador Lag resultou:
Terminando de fechar a malha e verificando como fica a resposta para entrada degrau:
xxxxxxxxxx>> ftma_Lag4=ftma;>> ftmf_Lag4=feedback(29.4*ftma_Lag4, 1);>> figure; step(ftmf_Lag4)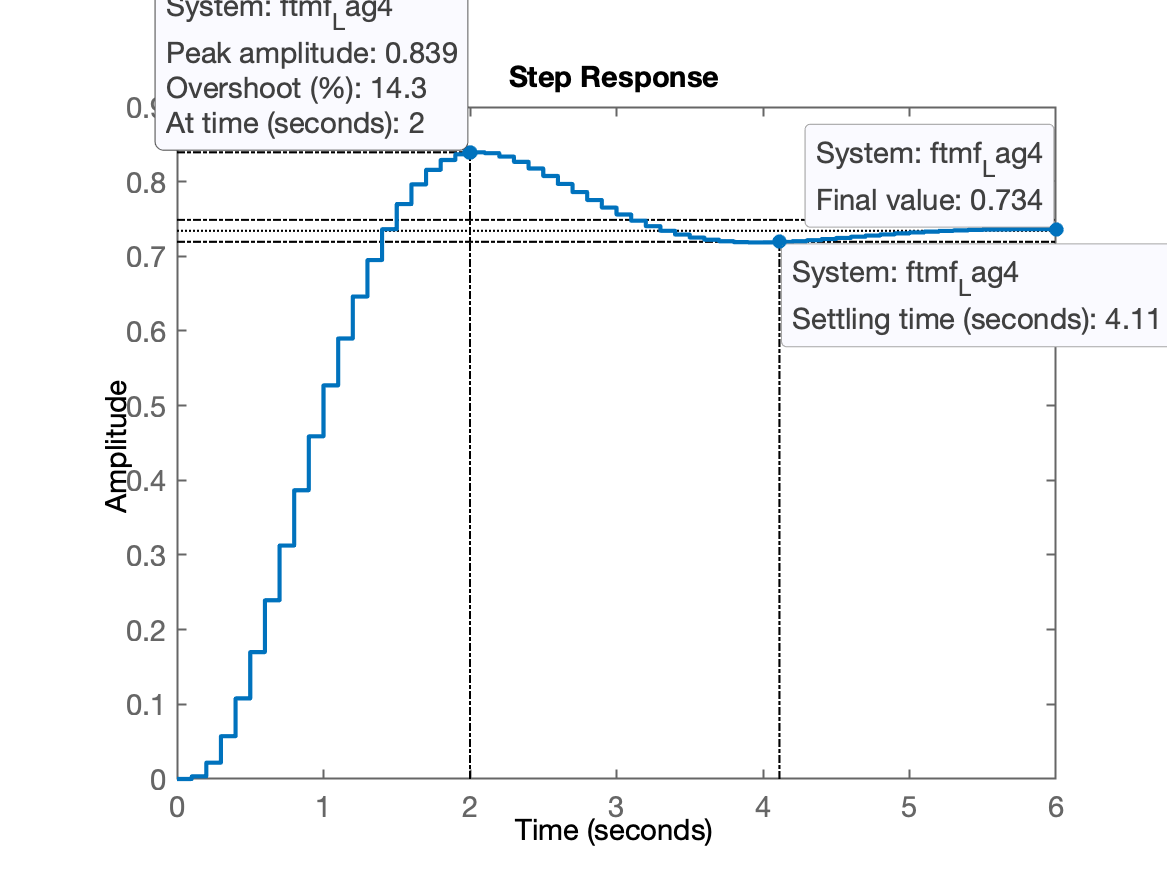
Encerrando atividades usando MATLAB nesta aula:
xxxxxxxxxx>> save dados>> diary off>> quitContinuando com teoria de controladores com Ação Derivativa, tópicos:
- Teoria inicial sobre Ação Derivativa + Filtros;
- Resumo Controladores PD & Lead (arquivo PDF; Aula de 21/05/2020);
Outros tópicos:
- Conteúdo das aulas anteriores (Semestre 2025/1);
- Conteúdo completo da disciplina.
Fernando Passold, em 14/04/2025