
Sintonia PID (Método do Relé - Parte II)
Na parte I, foi estudada a teoria associada com este método. Resumindo:
Astrom e Hagglund (1984) propuseram um poderoso método de variação de auto-sintonia (ATV = Auto-Tune Variation) para obter o ganho final,
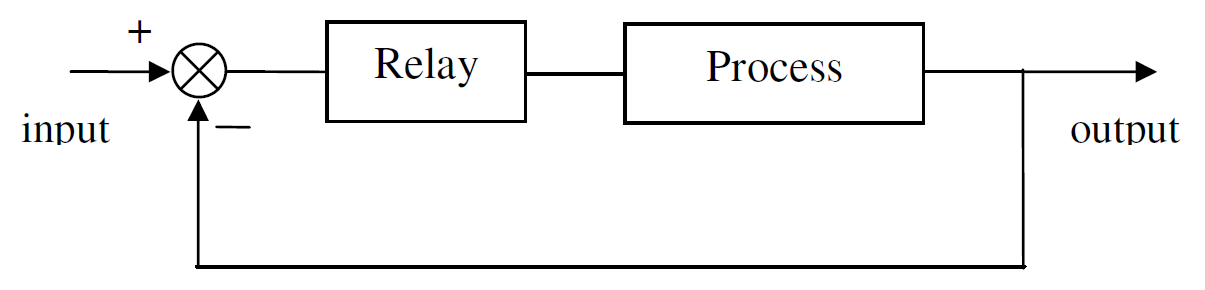
A ação do relé fará a entrada do processo alternar ao redor do estado estável
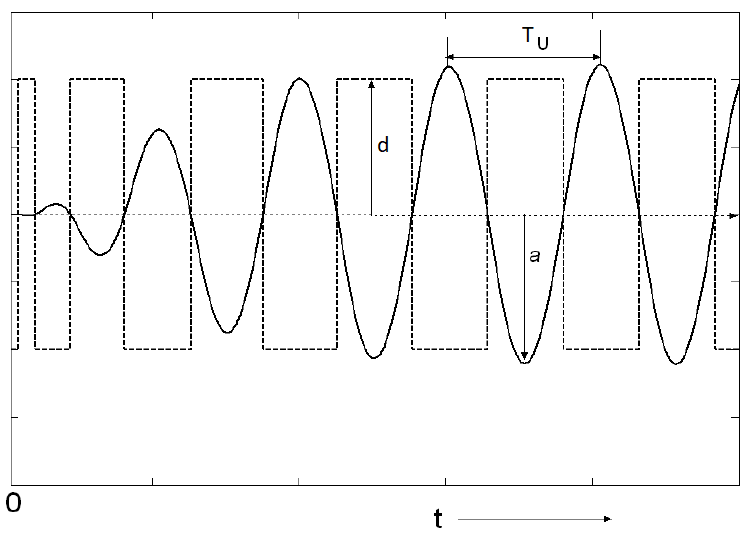
O período de oscilações corresponde ao período final,
Vantagens:
O método ATV tem vantagens sobre os outros métodos. Este método encontra automaticamente a frequência crítica (ou período) de oscilação do processo. Além disso, grandes desvios longe do estado estável são evitados, pois este é um teste de loop fechado. Eventualmente os valores do ciclo limite do relé podem ser definidos pelo usuário, alimentando a planta com os valores máximos
A ideia agora é Implementar o método do relé no Matlab/Simulink...
Simulação usando Simulink
Seja a planta:
Implementando o metódo do relé para este planta no Matlab/Simulink, podemos chegar à (arquivo: planta_ajuste_metodo_rele.slx):
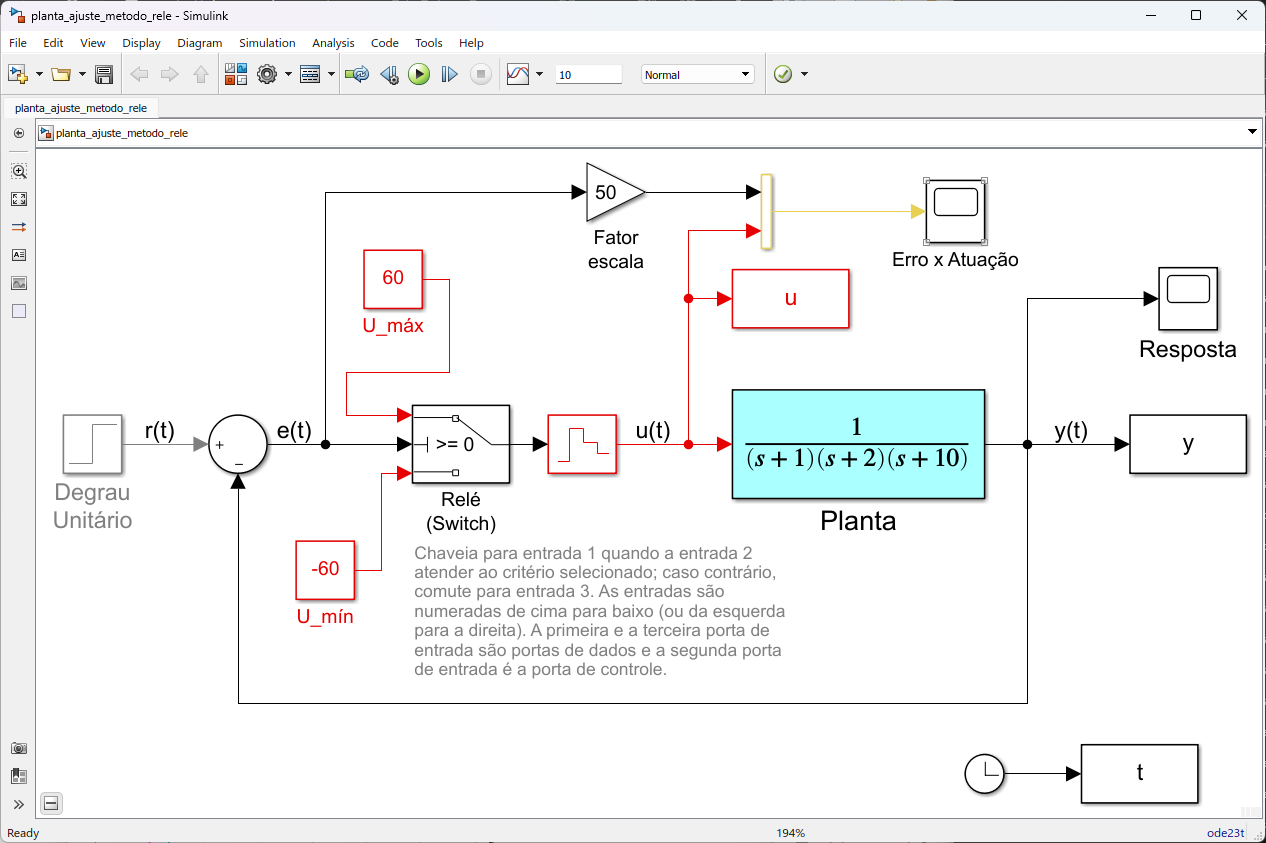
Note alguns detalhes:
-
A referência estabelecida foi um sinal degrau (constante de amplitude
). -
O ganho DC (
) desta planta é bem baixo: >> G=tf(1,poly([-1 -2 -10])); >> zpk(G) 1 ------------------ (s+10) (s+2) (s+1) >> dcgain(G) 0.05ou:
. Motivo pelo qual, para as amplitudes dos sinais de atuação/controle, à serem gerados pelo relé, foi optado pelo valor 60: >> dcgain(G)*60 ans = 3
Resultados obtidos com esta simulação:
Gráfico do sinal de erro
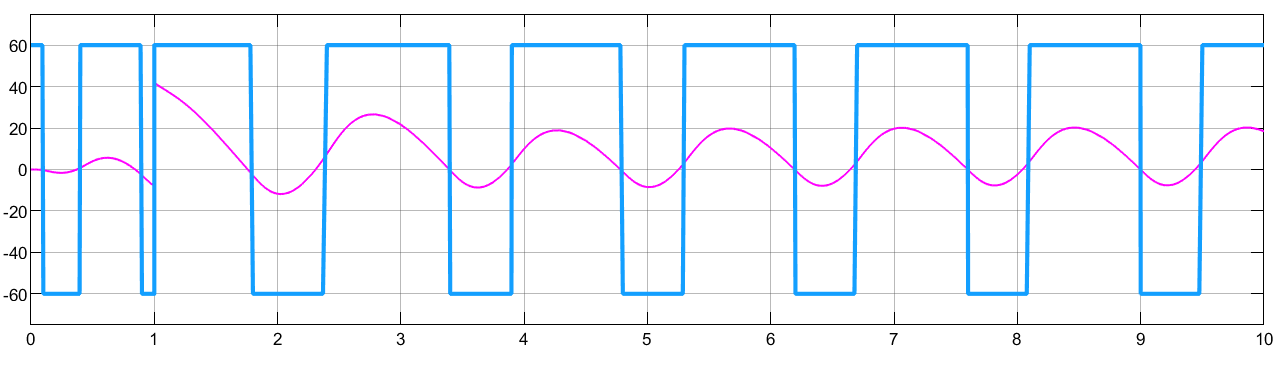
Gráfico da resposta (saída) do sistema:
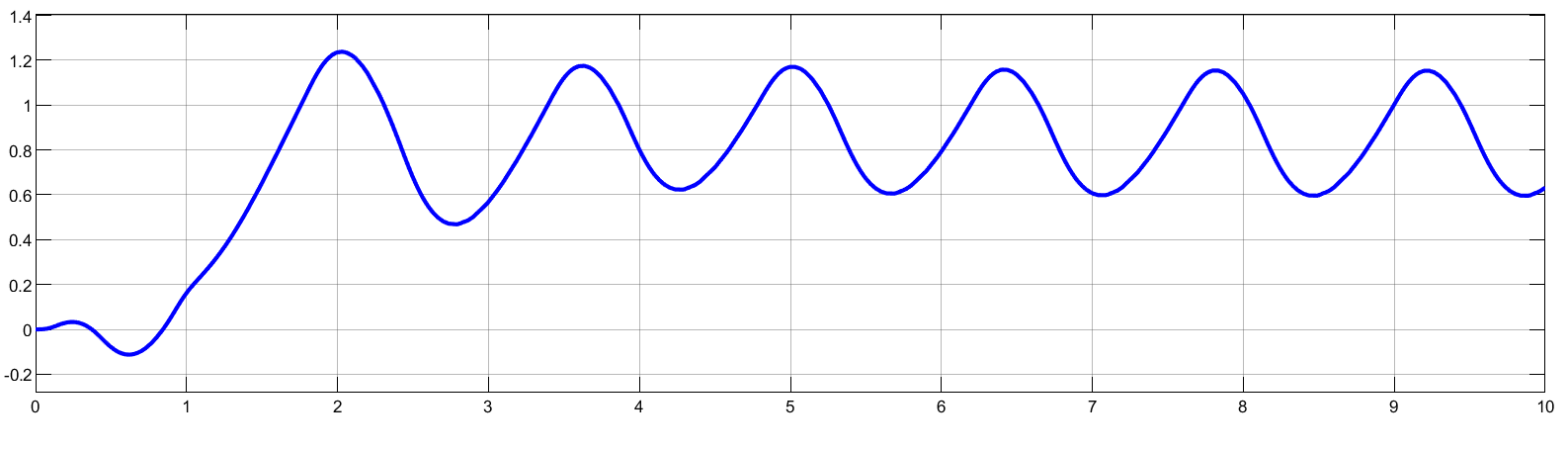
Necessitamos agora caputar as informações que nos interessam:
Extraíndo a informação do período de oscilação, 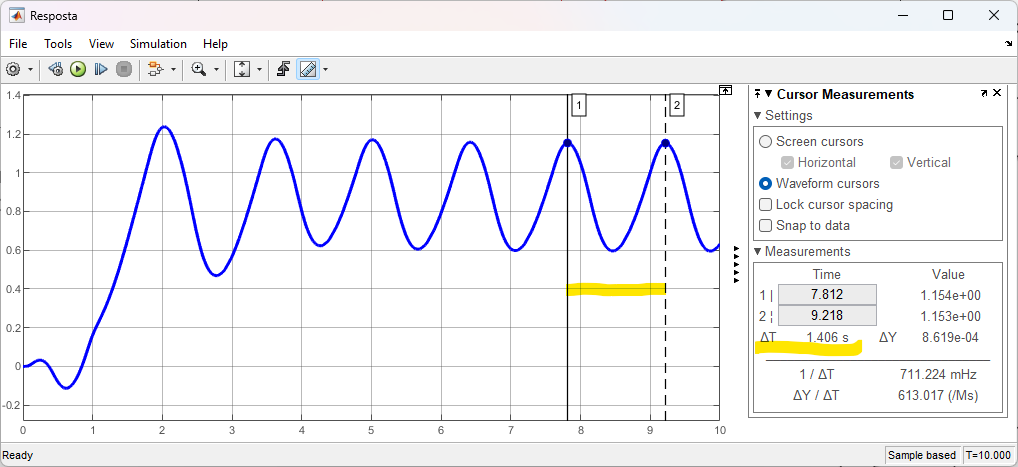 Da figura percebemos que
Da figura percebemos que
Extraíndo a informação referente à amplitudade da oscilação, 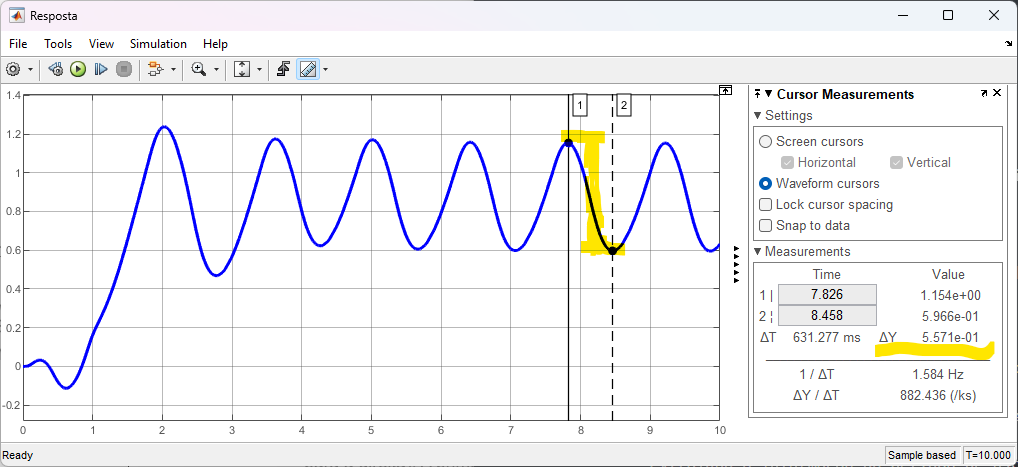 Da figura, temos que
Da figura, temos que
>> a=0.5571/2
a =
0.27855
Extraíndo informação referente ao sinal gerado pelo relé:
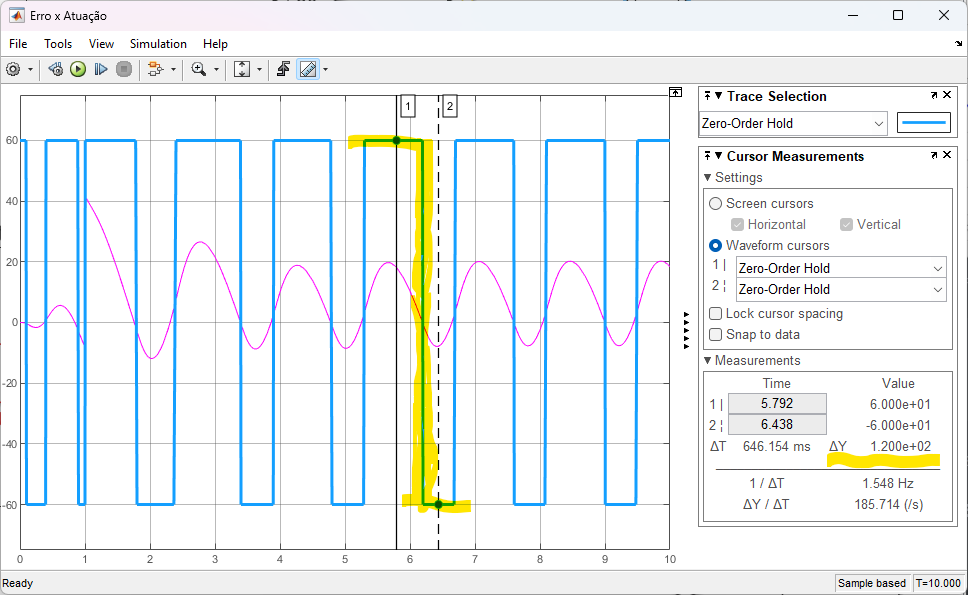 Da figura, temos que
Da figura, temos que
Completando os cálculos de estimativa do
>> d=60;
>> Ku=(4*d)/(pi*a)
Ku =
274.26
Calculando os parâmetros para o PID usando a tradicional tabela de Zigler-Nichols:
>> Tu=1.406;
>> Kp=.6*Ku
Kp =
164.55
>> Ki=1.2*(Ku/Tu)
Ki =
234.07
>> Kd=0.074*Ku*Tu
Kd =
28.535
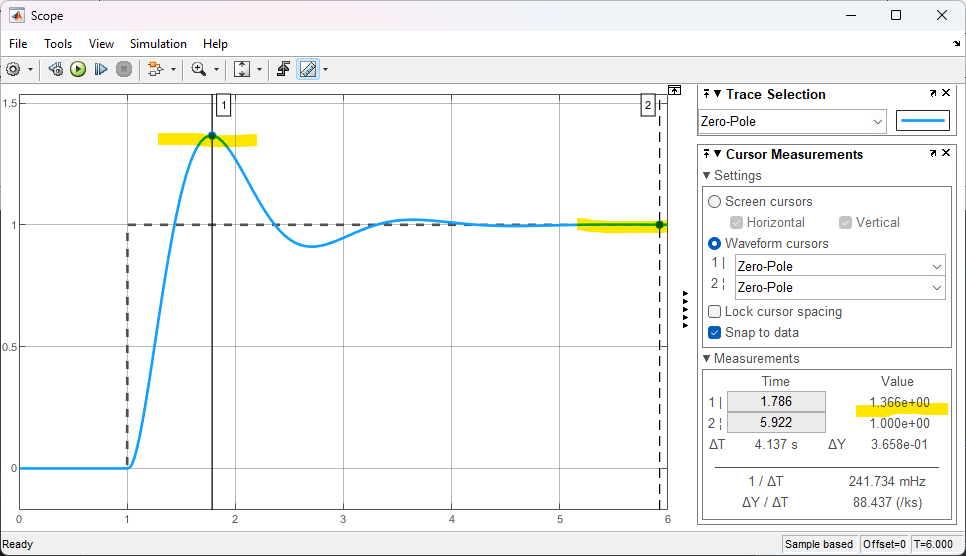
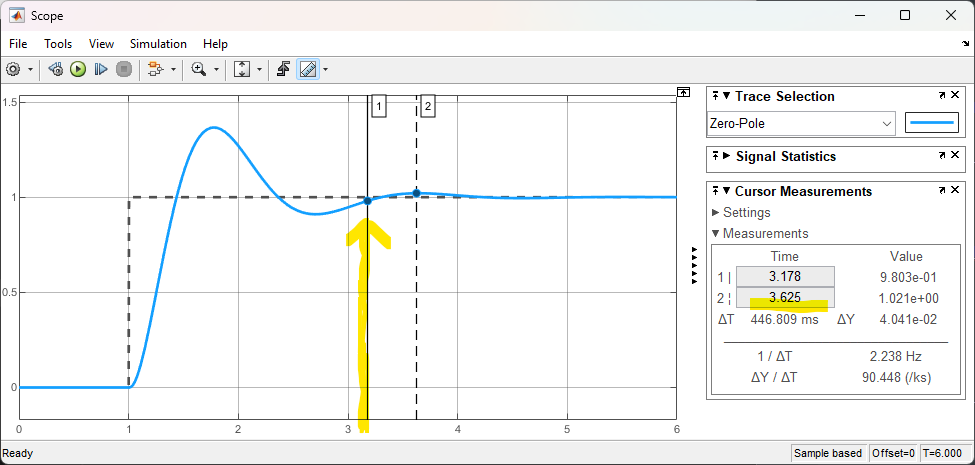
Aplicando no PID do Matlab/Simulink (arquivo: planta_2_PID.slx):

Os parâmetros usados foram:
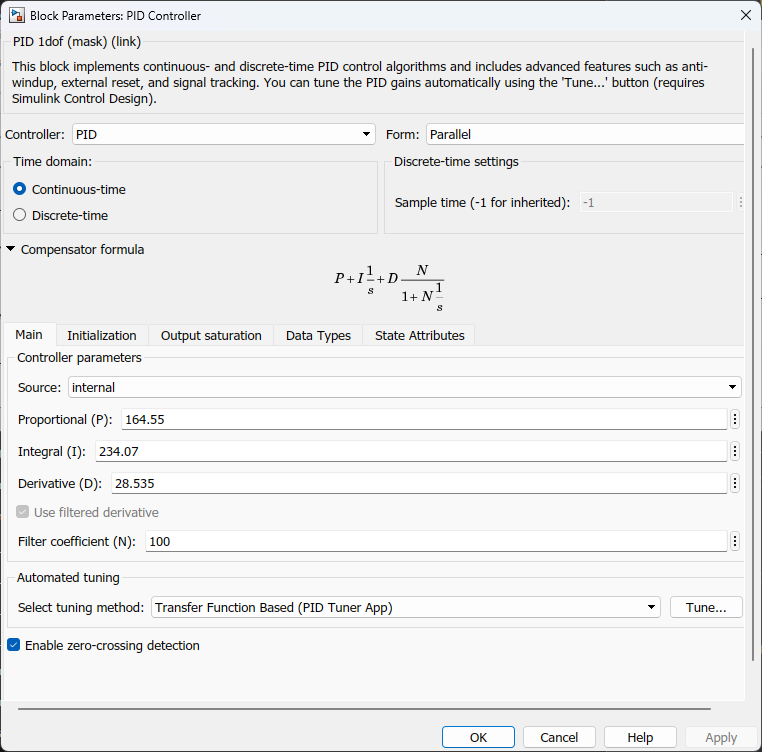
Obs.: deixado parâmento
Obtemos as seguintes respostas:
 ou seja um overshhot de
ou seja um overshhot de
 e um tempo de assentamento,
e um tempo de assentamento,
Este PID pode ser melhorando re-ajustando valores de
Trabalho I
Prof. Fernando Passold, em 27.10.2022, 21/03/2023