
Projeto Controladores
Planta para Estudo de Caso
Suponha que a planta que usaremos para estudo de caso neste semestre seja:
Questão (inicial): que valor vamos adotar para período de amostragem deste sistema?
Solução:
Lembramos que a frequência angular,
dai podemos descobrir o valor da frequência
A banda passante da planta (pólo de maior frequência), corresponde ao pólo na posição
Amostrando 20 vezes mais rápido:
>> fs=20*ans
fs =
63.662
>> T=1/fs
T =
0.015708
Adotando período de amostragem igual à 20 ms:
>> T=20E-3
T =
0.02
Testando esta freq. de amostragem:
>> G=tf(400,poly([-2 -5 -20]));
>> zpk(G)
ans =
400
------------------
(s+20) (s+5) (s+2)
Continuous-time zero/pole/gain model.
>> BoG = c2d(G, T);
>> zpk(BoG)
ans =
0.00046711 (z+3.27) (z+0.2335)
--------------------------------
(z-0.9608) (z-0.9048) (z-0.6703)
Sample time: 0.02 seconds
Discrete-time zero/pole/gain model.
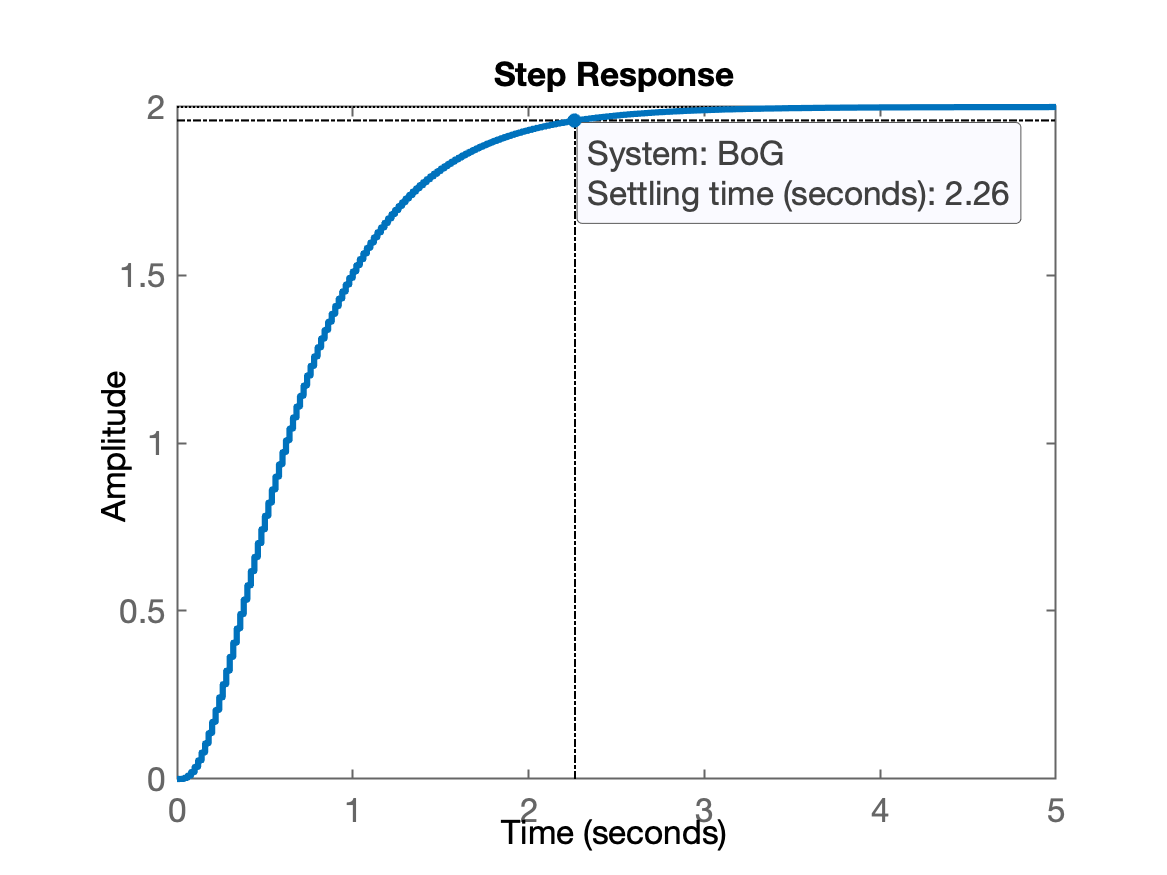
>> step(BoG)
A resposta ao degrau em MA fica:
Projeto do Controlador Proporcional
Primeiro passo, traçando o RL:
>> figure; rlocus(BoG)
E temos o gráfico:
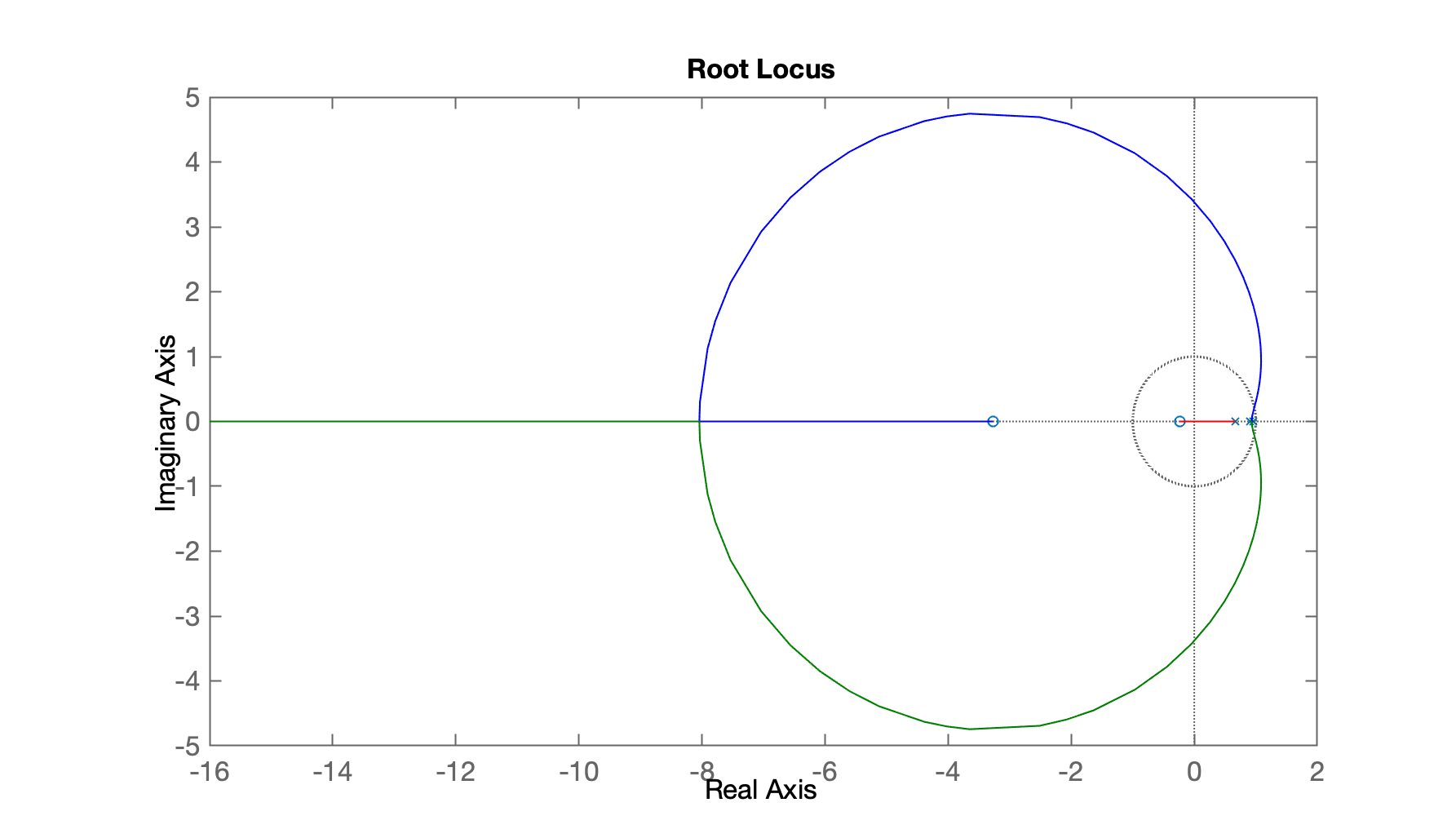
Realizando um "zoom" na região de interesse:
>> axis([0.4 1.1 -0.5 0.5])
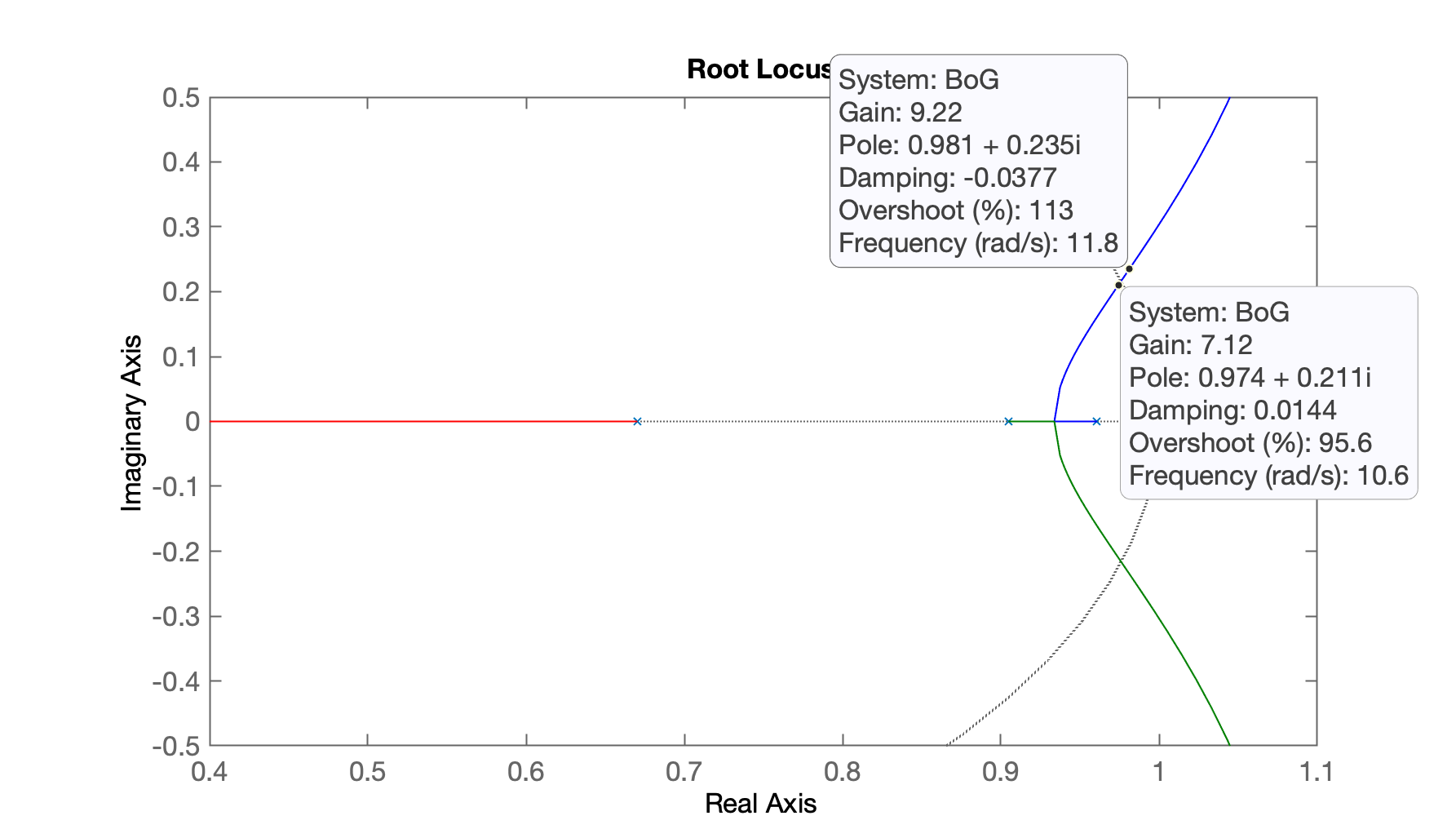
Deste RL concluímos que
Controlador Proporcional SEM Overshoot
Supondo que eu queria uma resposta super-amortecida (sem overshoot: só pólos reais em MF):
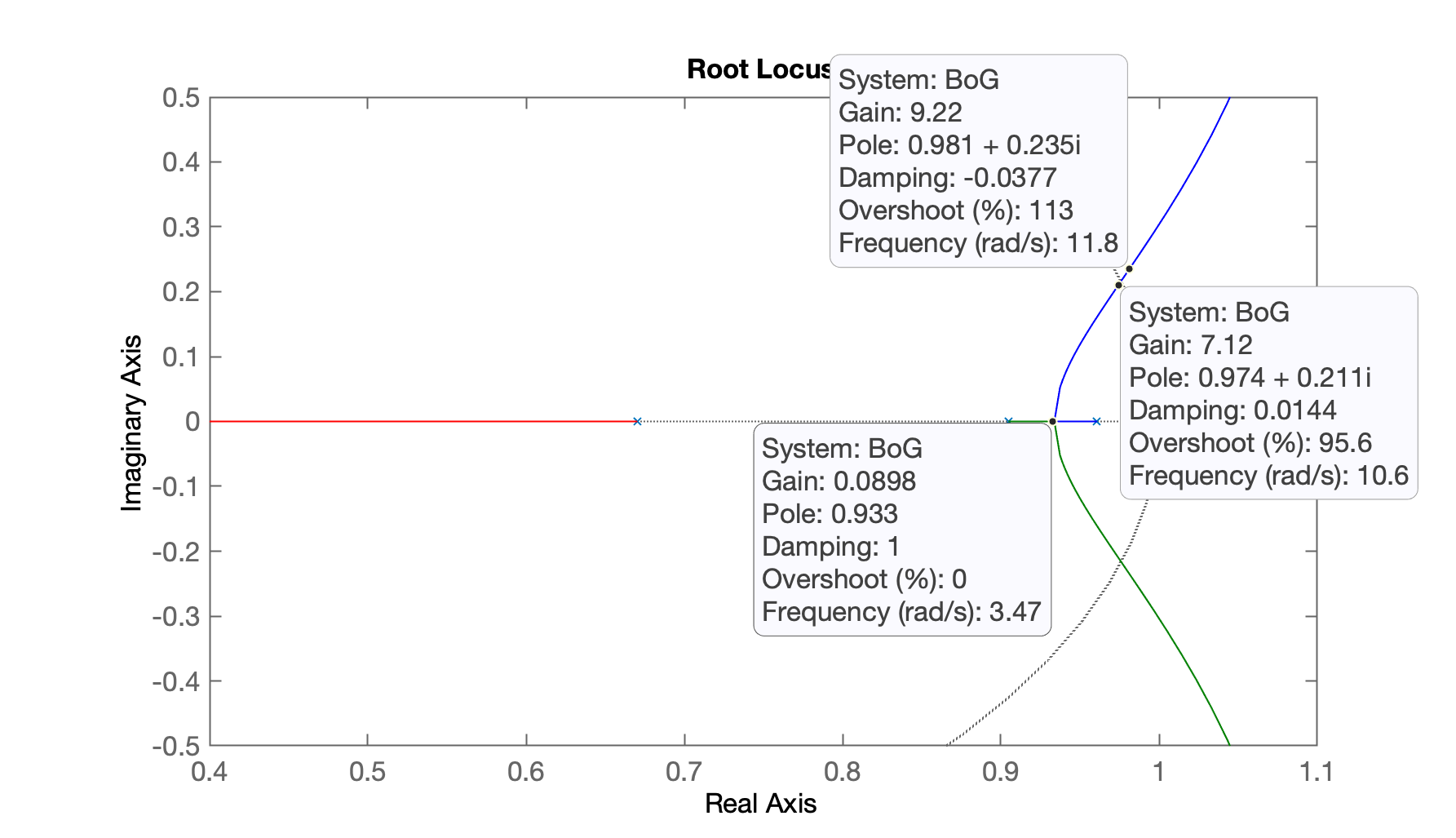
Então fechando a malha com
>> K=0.08;
>> % fechando a malha
>> ftmf_K_super=feedback(K*BoG, 1);
>> pole(ftmf_K_super)
ans =
0.94298
0.92453
0.6684
>> figure; step(ftmf_K_super)
>> stepinfo(ftmf_K_super)
ans =
struct with fields:
RiseTime: 1
SettlingTime: 1.82
SettlingMin: 0.12433
SettlingMax: 0.13788
Overshoot: 0
Undershoot: 0
Peak: 0.13788
PeakTime: 3.18
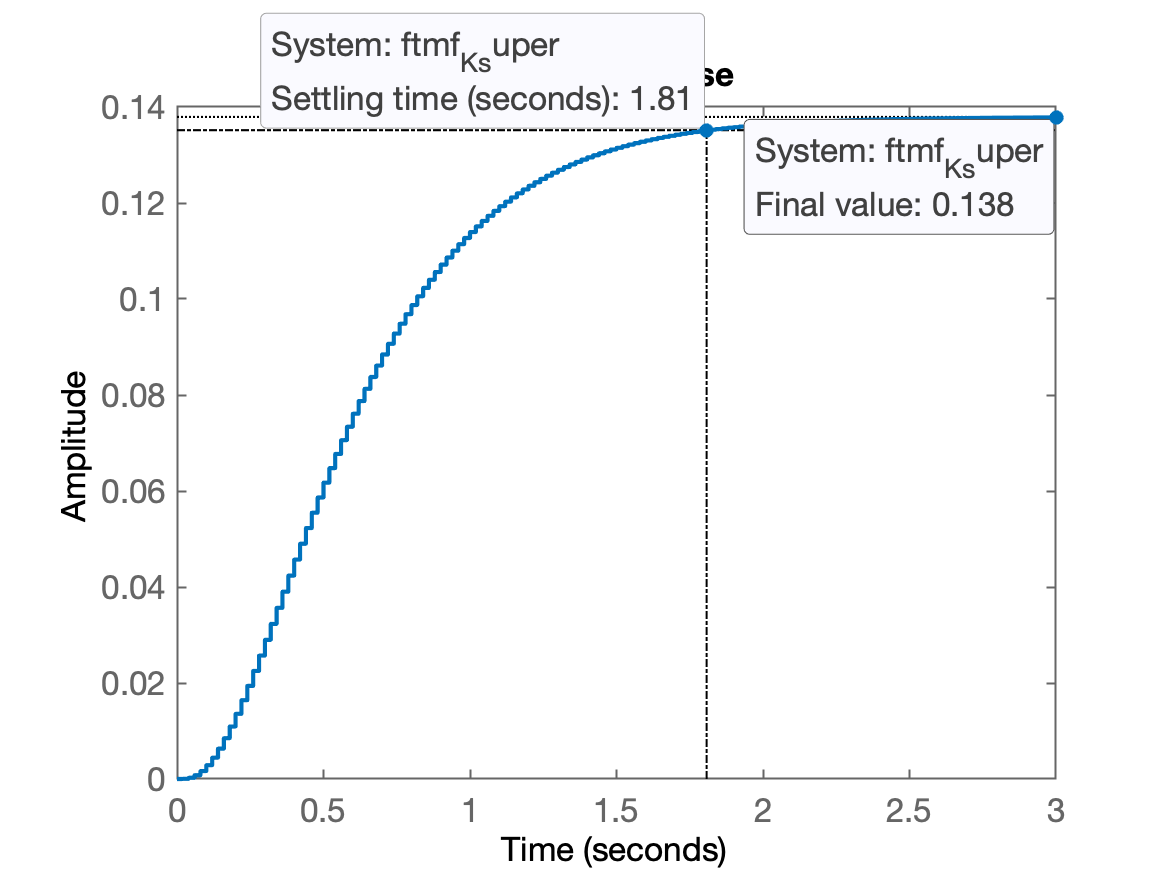
Percebemos que se for desejada uma resposta super-amortecida, sem overshoot, conseguimos acelerar a planta em MF em:
>> 2.26/1.82
ans =
1.2418
Este sistema em MF foi acelerado de quase 25% em relação à planta em MA (lembre-se o ganho adotado aqui foi de apenas
Mas ainda apresenta um elevado erro em regime permanente. Repare:
>> dcgain(ftmf_K_super)
ans =
0.13793
>> erro = (1 - dcgain(ftmf_K_super))/1*100
erro =
86.207
>>
Controlador Proporcional com algum Overshoot
E se fosse desejada uma resposta mais acelerada, apenas com overshoot.
Supondo que toleramos um overshoot de 10%:
>> OS=10;
>> zeta=(-log(OS/100))/(sqrt(pi^2+(log(OS/100)^2)))
zeta =
0.59116
>> % mudar o foco da janela gráfica para o RL
>> figure(2)
>> hold on
>> zgrid(zeta, 0)
E temos então:
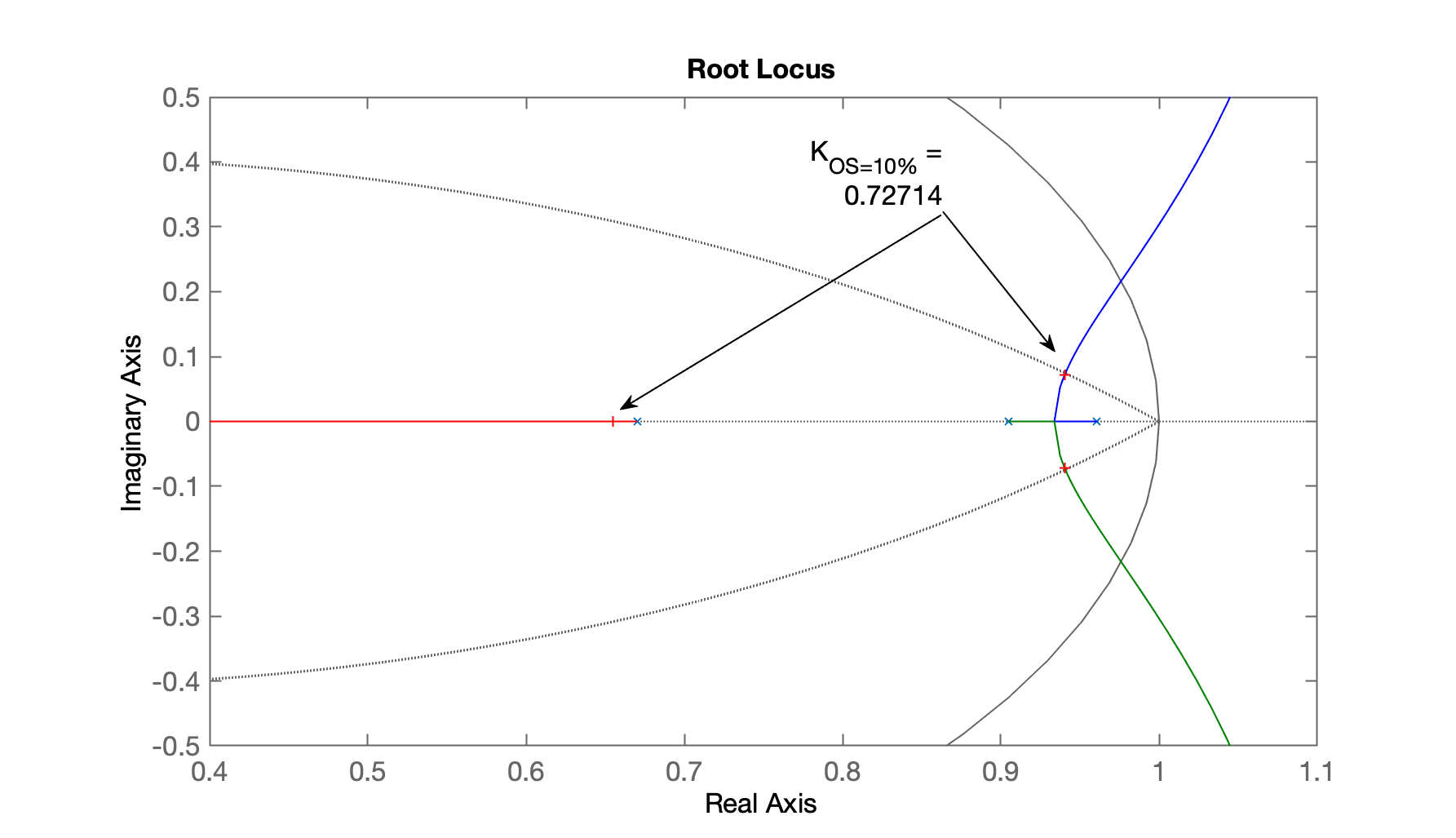
Fixando o ganho em
>> K_OS10=0.75;
>> % fechando a malha
>> ftmf_K_OS10=feedback(K_OS10*BoG, 1);
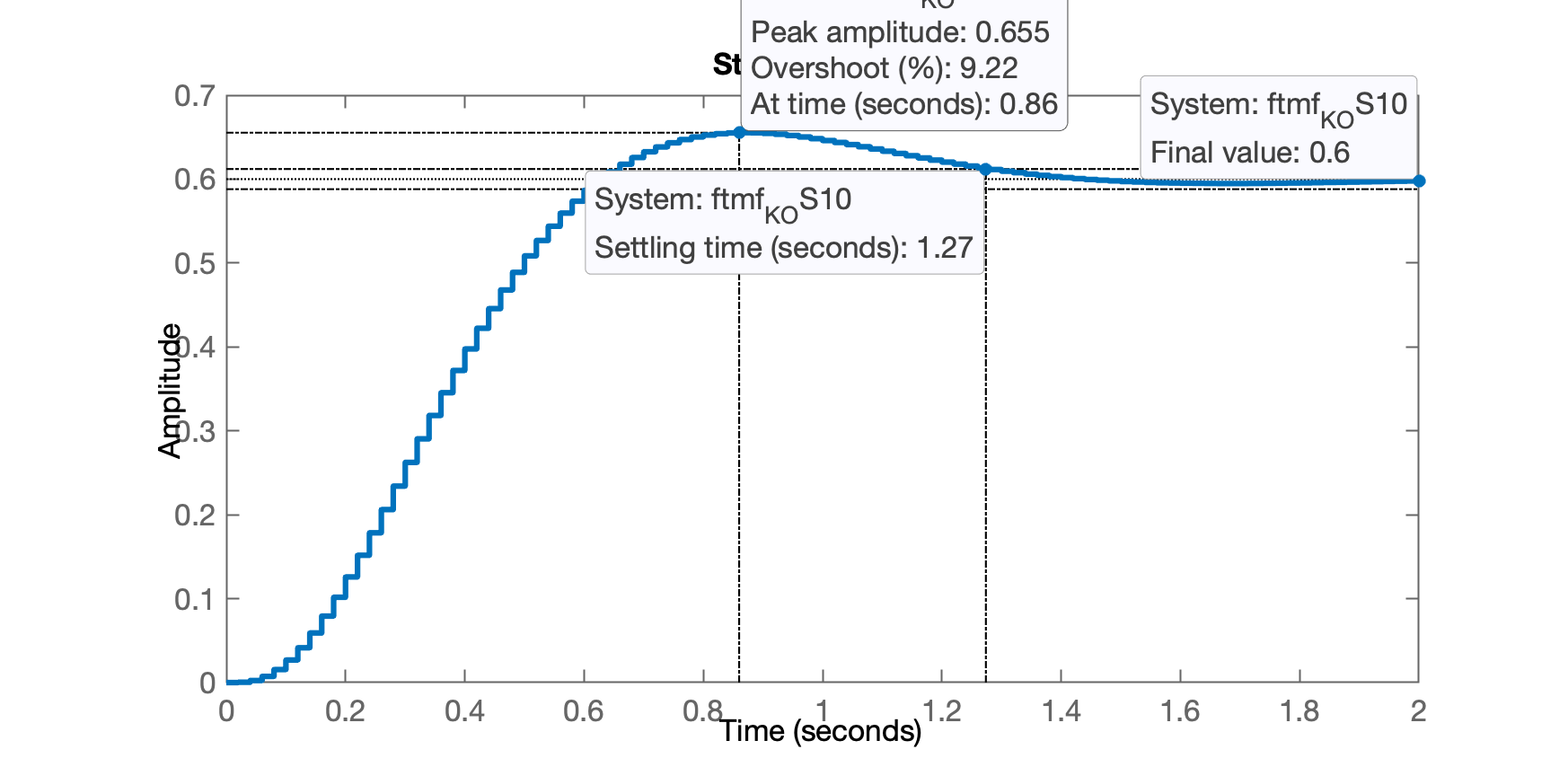
>> figure; step(ftmf_K_OS10)
>> stepinfo(ftmf_K_OS10)
ans =
struct with fields:
RiseTime: 0.38
SettlingTime: 1.28
SettlingMin: 0.54387
SettlingMax: 0.65533
Overshoot: 9.2212
Undershoot: 0
Peak: 0.65533
PeakTime: 0.86
>>
E a resposta à entrada degrau unitário neste caso, fica:
Note alguns detalhes que passaram desapercebidos:
- A planta à ser controlada é um sistema tipo 0, isto é, sem ação integral, o que implica erro diferente de zero para entradas tão simples quanto uma entrada degrau.
- Sistemas tipo 0, operando em malha-fechada sem ação integral não vão garantir erro nulo para regime permanente.
- Com Controle Proporcional sobre um sistema tipo 0, como é o caso, sempre haverá erro (limitado) para uma entrada degrau. A única maneira de limitar o erro é usando-se, neste caso, ganhos elevados. Mas um ganho elevado demais pode implicar num sistema instável em MF.
Neste caso, o erro de regimente permamente ficou em 40%.
Controle Proporcional com erro limitado
Questão: vamos supor que se queira tentar fechar uma malha para este sistema usando um simples Controlador Proporcional, mas limitando o erro à 10% no máximo.
Projeto finalizado na aula de 22/09/2023
Solução Neste caso, temos que usar a Teoria do Erro para prever que valor de ganho deveria ser adotado para garantir erro limitado ao valor citado.
Neste caso (sistema do tipo 0) submetido à uma entrada degrau, temos o seguinte erro previsto:
isolando o
Calculando o
>> Kp = (1-0.1)/0.1
Kp =
9
>>
Agora necessito calcular o
Calculando o limite usando o Matlab:
>> dcgain(BoG)
ans =
2
>> [numd,dend]=tfdata(BoG,'v')
numd =
0 0.00046711 0.0016366 0.00035661
dend =
1 -2.5359 2.1199 -0.58275
>> lim = polyval(numd, 1)/polyval(dend, 1)
lim =
2
Então temos:
No nosso caso:
>> Kd=Kp/2
Kd =
4.5
Questão: este ganho pode ser adotado?
Fechando a malha...
>> ftmf_Kd = feedback(Kd*BoG, 1);
>> pole(ftmf_Kd)
ans =
0.96399 + 0.17296i
0.96399 - 0.17296i
0.60587 + 0i
>> polosMF_Kd=pole(ftmf_Kd)
polosMF_Kd =
0.96399 + 0.17296i
0.96399 - 0.17296i
0.60587 + 0i
>> raio = abs(polosMF_Kd)
raio =
0.97938
0.97938
0.60587
>> figure; rlocus(BoG)
>> hold on;
>> plot(polosMF_Kd, 'rd', 'MarkerSize', 14)
>> axis([-0.6 1.2 -0.4 0.4])
Temos o seguinte RL mostrando onde ficam localizados os pólos de MF para este valor de ganho:
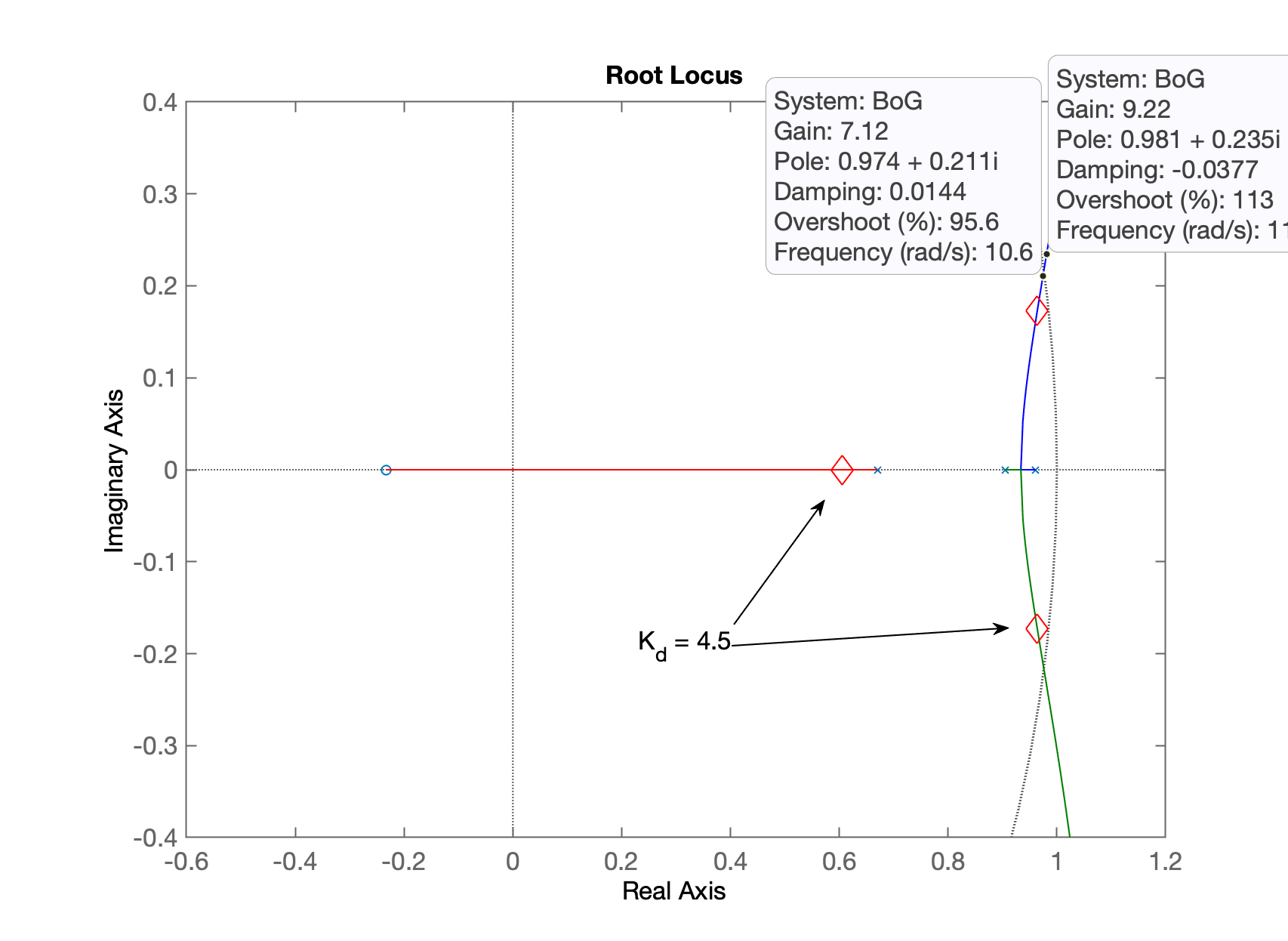
Nota-se que
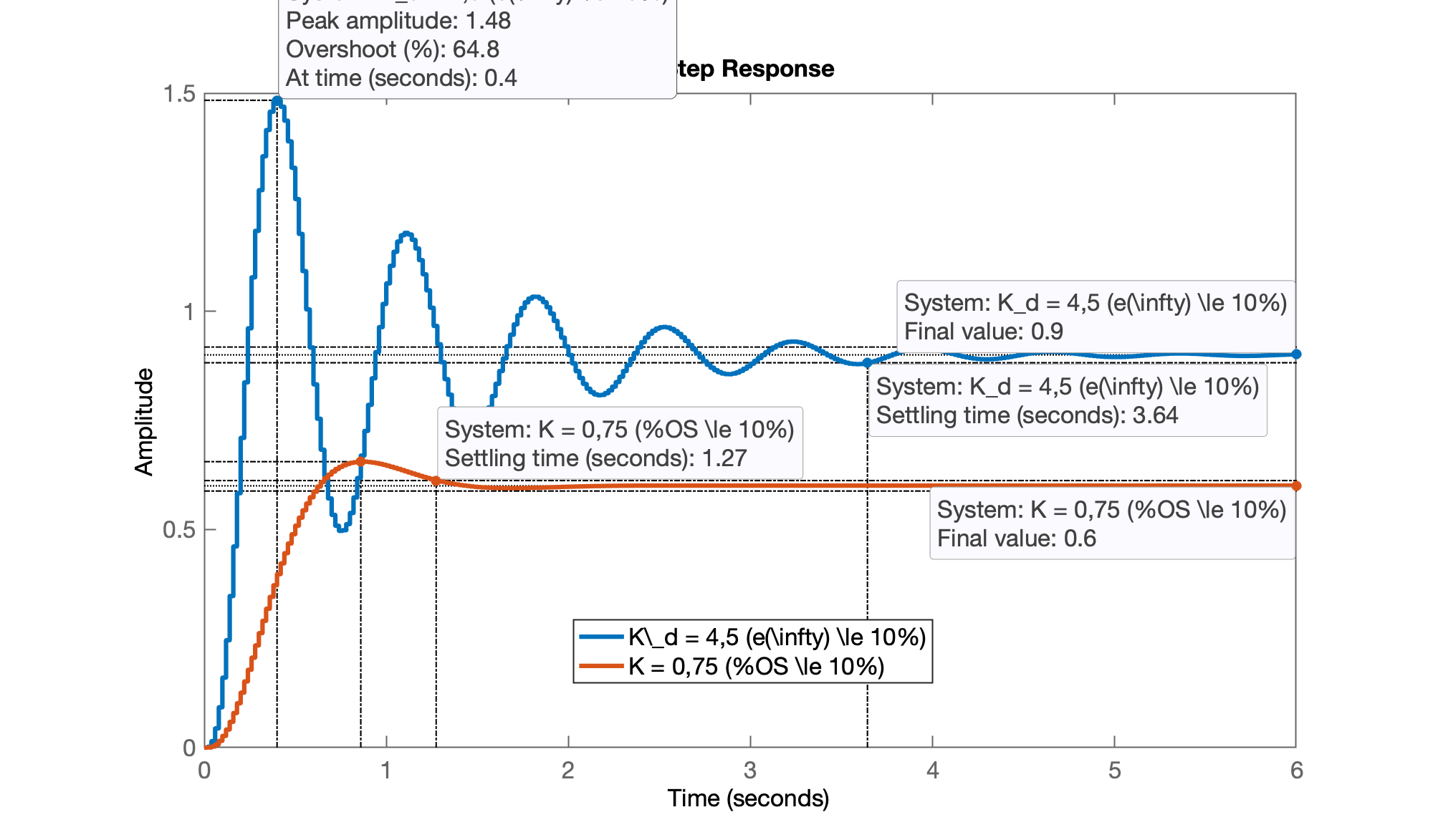
Verificando a resposta em MF para entrada degrau.
>> figure; step(ftmf_Kd, ftmf_K_OS10)
>> legend('K_d=4,5 (e(\infty \le 10%)', 'K = 0,75 (%OS \le 10%)')
>> stepinfo(ftmf_Kd)
RiseTime: 0.14
SettlingTime: 3.66
SettlingMin: 0.49679
SettlingMax: 1.4835
Overshoot: 64.832
Undershoot: 0
Peak: 1.4835
PeakTime: 0.4
>>
Resumo
Segue resumo do desempenho obtido à partir de Controladores Proporcionais:
| Critério | ||||
|---|---|---|---|---|
| Resposta Super-amortecida | 0,08 | 0 | 1,81 | 86,2% |
| Overshoot <10% | 0,75 | 9,2% | 1,27 | 40% |
| Erro <10% | 4,5 | 64,8% | 3,7 | 10% |
Efetivamente, com os projetos de controladores Proporcionais já realizamos percebemos que:
🤨 blá-blá-blá...
Encerrando seção de trabalho para 2a-parte da aula... 📝
>> save planta
>> diary off
Continua na próxima aula, do dia 22/09/2023
Fernando Passold, em 15/09/2023