
Projeto de Controladores
Continuação da aula anterior, de 15/09/2023 ✍🏻.
Para continuar os trabalhos da aula anterior, no Matlab:
>> load planta
Controladores com Ação Integral
Ação integral no plano-
Note o pólo em
Testando controlador Integrador Puro
Equação:
Executando o projeto deste controlador no Matlab:
>> C_I = tf(1, [1 -1], T)
C_I =
1
-----
z - 1
Sample time: 0.02 seconds
Discrete-time transfer function.
>> ftma_I = C_I*BoG;
>> zpk(ftma_I)
0.00046711 (z+3.27) (z+0.2335)
--------------------------------------
(z-1) (z-0.9608) (z-0.9048) (z-0.6703)
Sample time: 0.02 seconds
Discrete-time zero/pole/gain model.
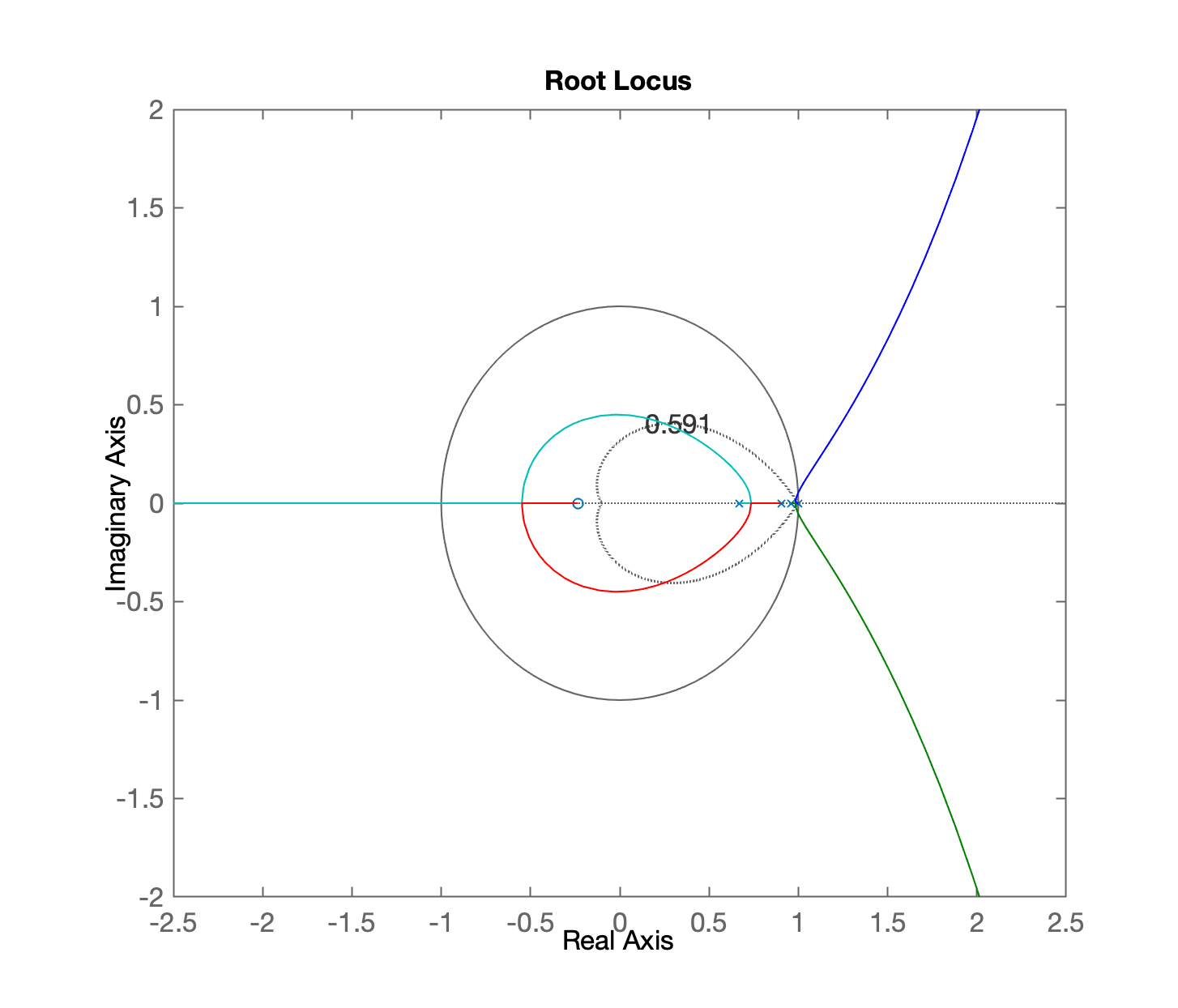
>> figure; rlocus(ftma_I)
>>
>> % Usando o critério de ação de controle,
>> % limitando o $\%OS$ em 10%.
>>
>> hold on; zgrid(zeta,0)
>>
>> % Realizando um "zoom" na região de interesse
>>
>> axis equal
>> axis([-2.5 2.5 -2 2])
Obtemos o seguinte RL para este controlador:
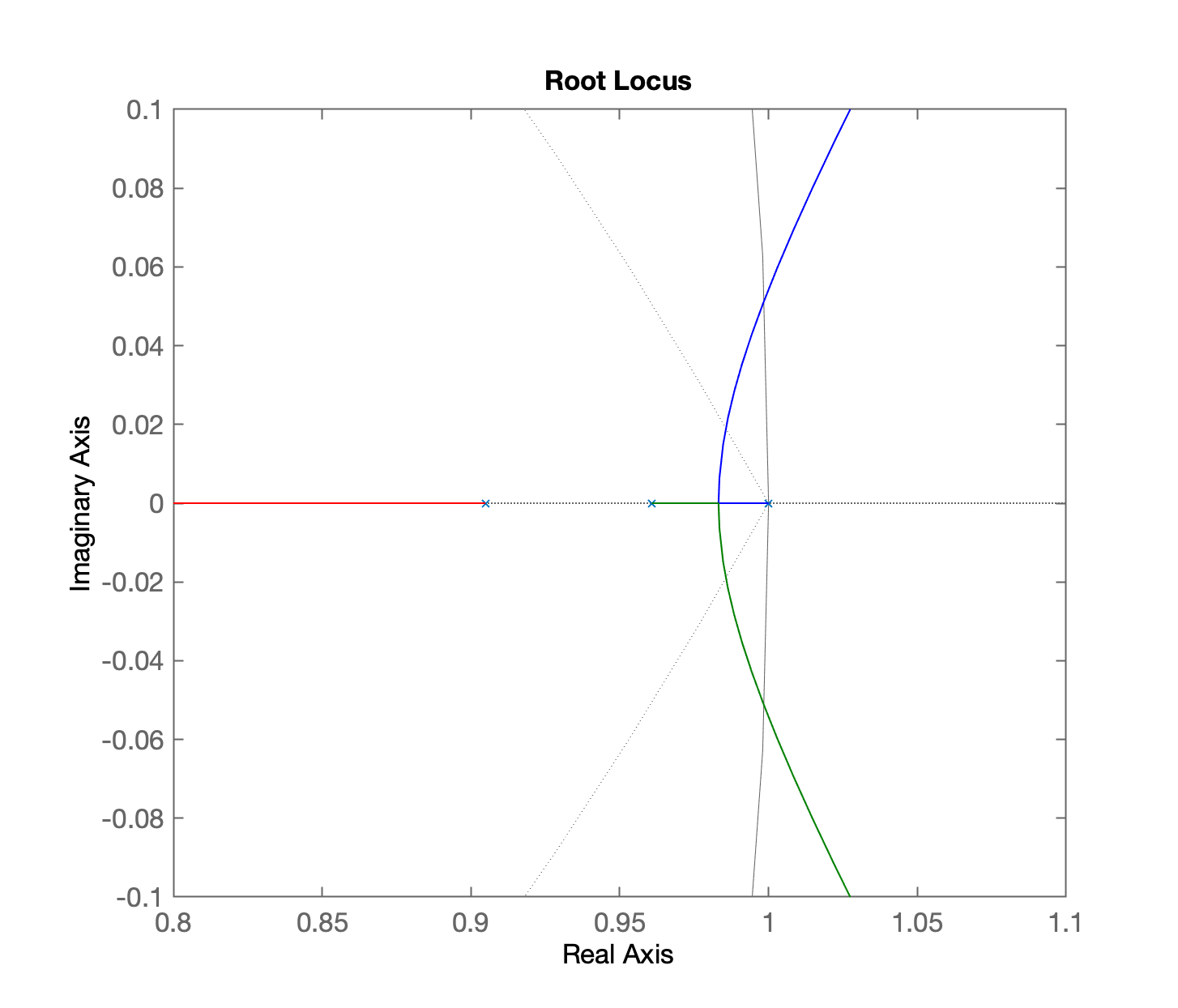
Melhorando o zoom anterior... tentando se concentrar na região com pólos dominantes próximos do círculo unitário (em
>> % Melhorando o zoom anterior...
>>
>> axis([0.8 1.1 -0.2 0.2])
>> axis([0.8 1.1 -0.1 0.1])
Obtemos então:
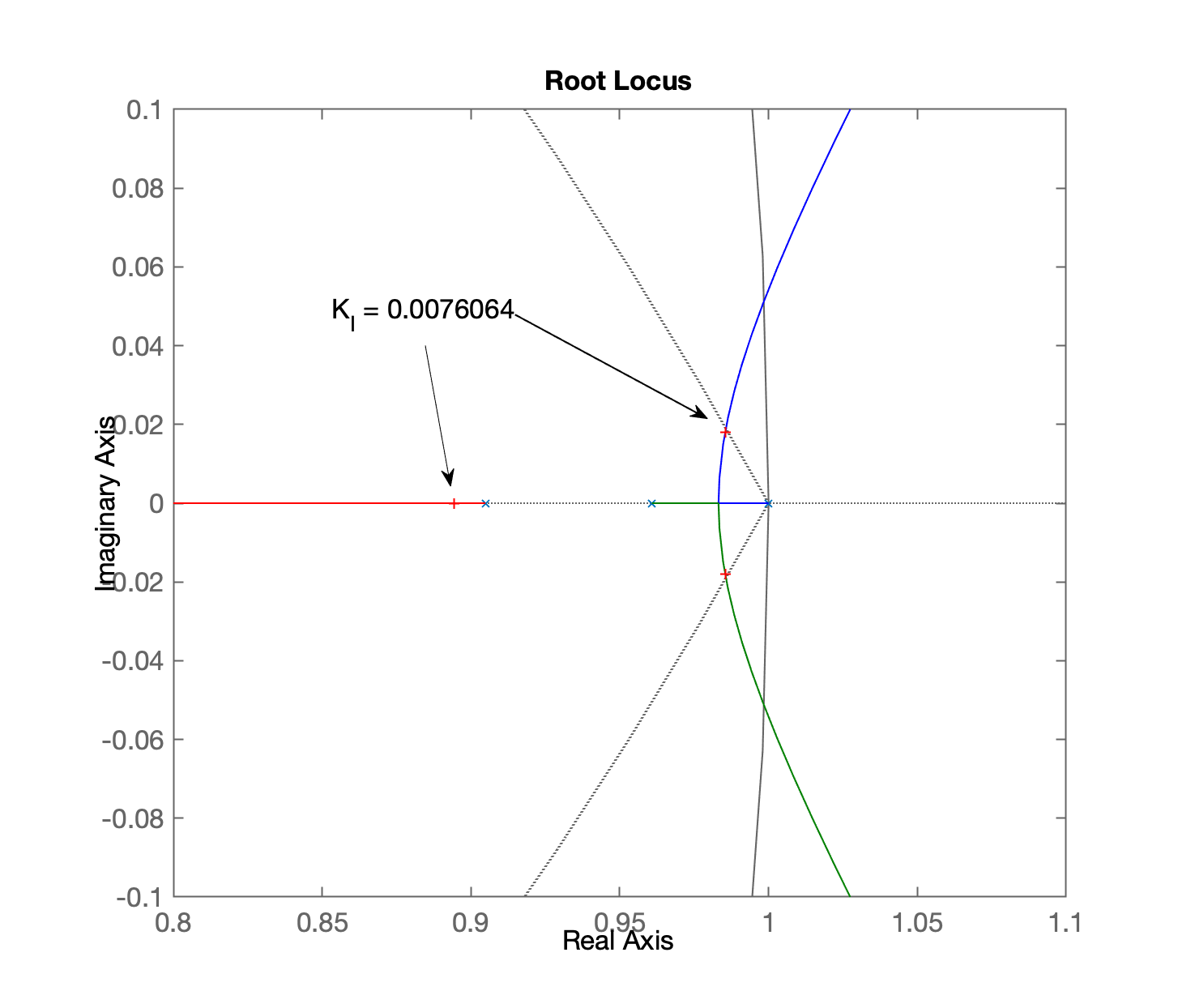
Realizando o ajuste do controlador (ou "sintonizando" o controlador):
>> [K_I,polosMF_I] = rlocfind(ftma_I)
Select a point in the graphics window
selected_point =
0.98629 + 0.017811i
K_I =
0.0076064
polosMF_I =
0.98541 + 0.01802i
0.98541 - 0.01802i
0.89425 + 0i
0.67089 + 0i
Ou seja, o RL final ressaltando o ganho adotado aparece na próxima figura:
Fechando a malha:
>> ftmf_I = feedback(K_I*ftma_I, 1);
>> figure; step(ftmf_I, ftmf_K_OS10);
>> legend('Integrador Puro', 'Kp (%OS < 10%)')
E então obtemos a seguinte resposta em MF para entrada degrau unitário:
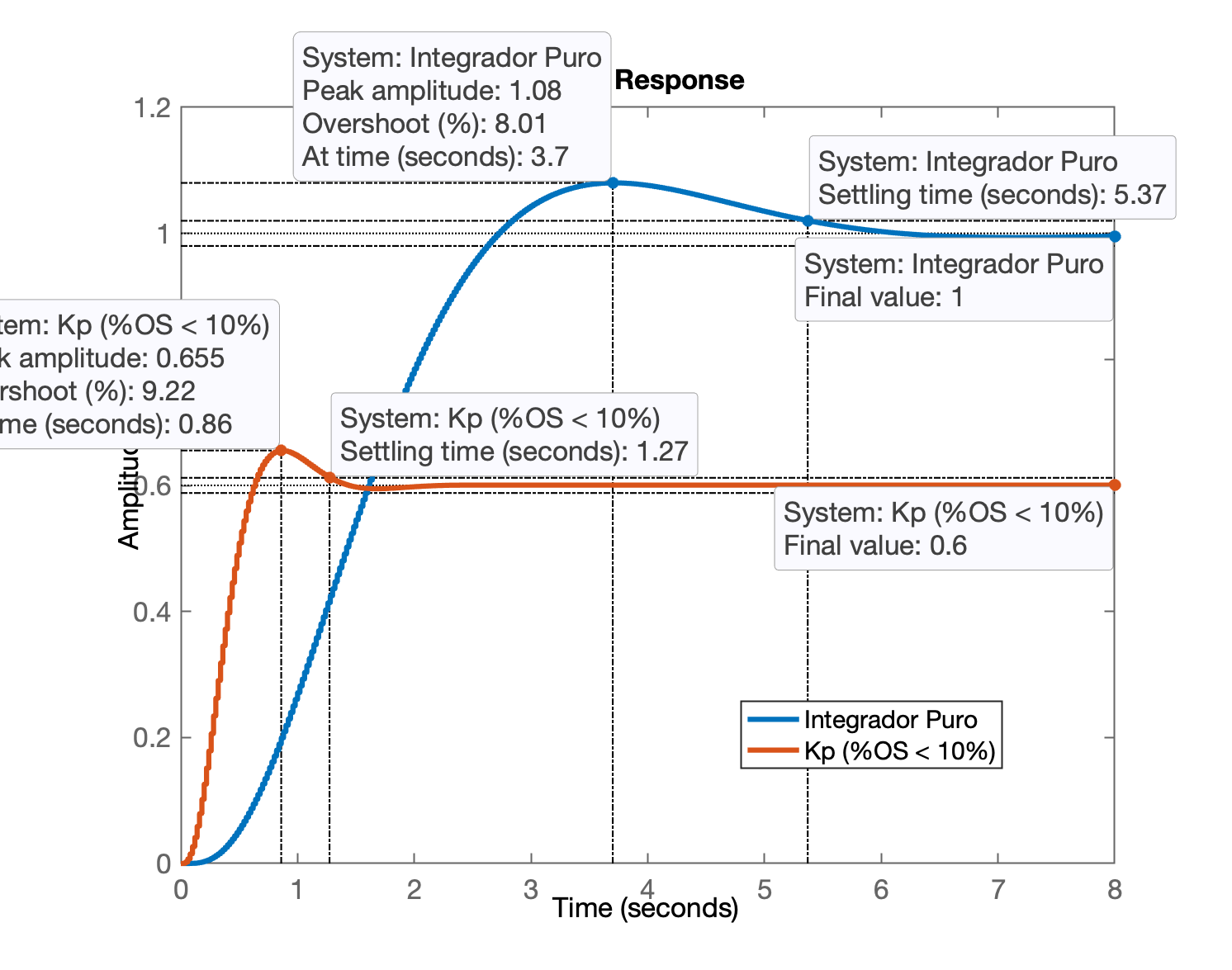
>> stepinfo(ftmf_I)
RiseTime: 1.68
SettlingTime: 5.38
SettlingMin: 0.90063
SettlingMax: 1.0801
Overshoot: 8.0065
Undershoot: 0
Peak: 1.0801
PeakTime: 3.7
Repare no valor do ganho encontrado para o Integrador Puro, ele é muito baixo:
Este valor é tão baixo que provavelmente é irrealizável. Ou vamos cair no problema da zona morta da planta sob controle (considerando não-linearidades num sistema).
A titulo de curiosidade
>> 5.37/1.27
ans =
4.2283
Este controlador é 4,23 vezes mais lento que o controlador Proporcional.
Finalizando a seção de trabalho no Matlab:
>> save planta
>> diary off
Fernando Passold, em 22/09/2023