 Espécie de camaleão considerada extinta ainda sobrevive.
Espécie de camaleão considerada extinta ainda sobrevive.
Projeto Controladores
Recuperando dados da aula passada (27/10/2023) e iniciando nova seção de trabalho:
>> diary aula_10112023.txt
>> load planta
Continuando as atividades...
Projeto de Lead
Base teórica, ver:
Lembrando da eq. do PD (da aula passada (27/10/2023)):
>> zpk(PD4)
(z-0.9608)
----------
z
Sample time: 0.02 seconds
Discrete-time zero/pole/gain model.
>> % E lembrando dos pólos e zeros da planta:
>> zpk(BoG)
0.00046711 (z+3.27) (z+0.2335)
--------------------------------
(z-0.9608) (z-0.9048) (z-0.6703)
Sample time: 0.02 seconds
Discrete-time zero/pole/gain model.
>> % podemos arbitrar o zero do PD entre os 2 pólos dominantes da planta:
>> z_Lead=(0.9608+0.9048)/2
z_Lead =
0.9328
Se vamos usar contribuição angular para determinar o local do pólo ou zero do controlador, necessitamos um parâmetro extra para poder definir a posição desejada para os pólos de MF. Além do
Mas... além disto, devemos determinar um valor "razoável" para
Estabelecendo
Usando o script angulos2.m (que exige a rotina arc.m), vamos obter:
>> angulos2
PD/Lead Controller Design
In this version you should arbitrate the initial position of the pole of C(z)
Plant (in s-plan) informed, G(s):
ans =
400
------------------
(s+20) (s+5) (s+2)
Continuous-time zero/pole/gain model.
Sampling time informed: T=0.02
Plant in discrete form, BoG(z):
ans =
0.00046711 (z+3.27) (z+0.2335)
--------------------------------
(z-0.9608) (z-0.9048) (z-0.6703)
Sample time: 0.02 seconds
Discrete-time zero/pole/gain model.
Maximum overshoot desired (%OS), in %: ? 10
zeta (damping factor) should be: 0.5912
Enter desired settling time, t_s: ? 0.5
It results in the natural oscillation frequency, wn = 13.5328 (rad/s)
The MF poles (in the s-plane) should be located in:
8.0000 +/- j10.9150
Localization of MF poles in the z-plane should be:
z = 0.8319 +/- j0.1845
Enter the position of the controller pole (z-plane): ? 0.25
Working with the temporary FTMA(z)...
Open poles = 0.960789
Open poles = 0.904837
Open poles = 0.67032
Open poles = 0.25
Open zeros = -3.27018
Open zeros = -0.233457
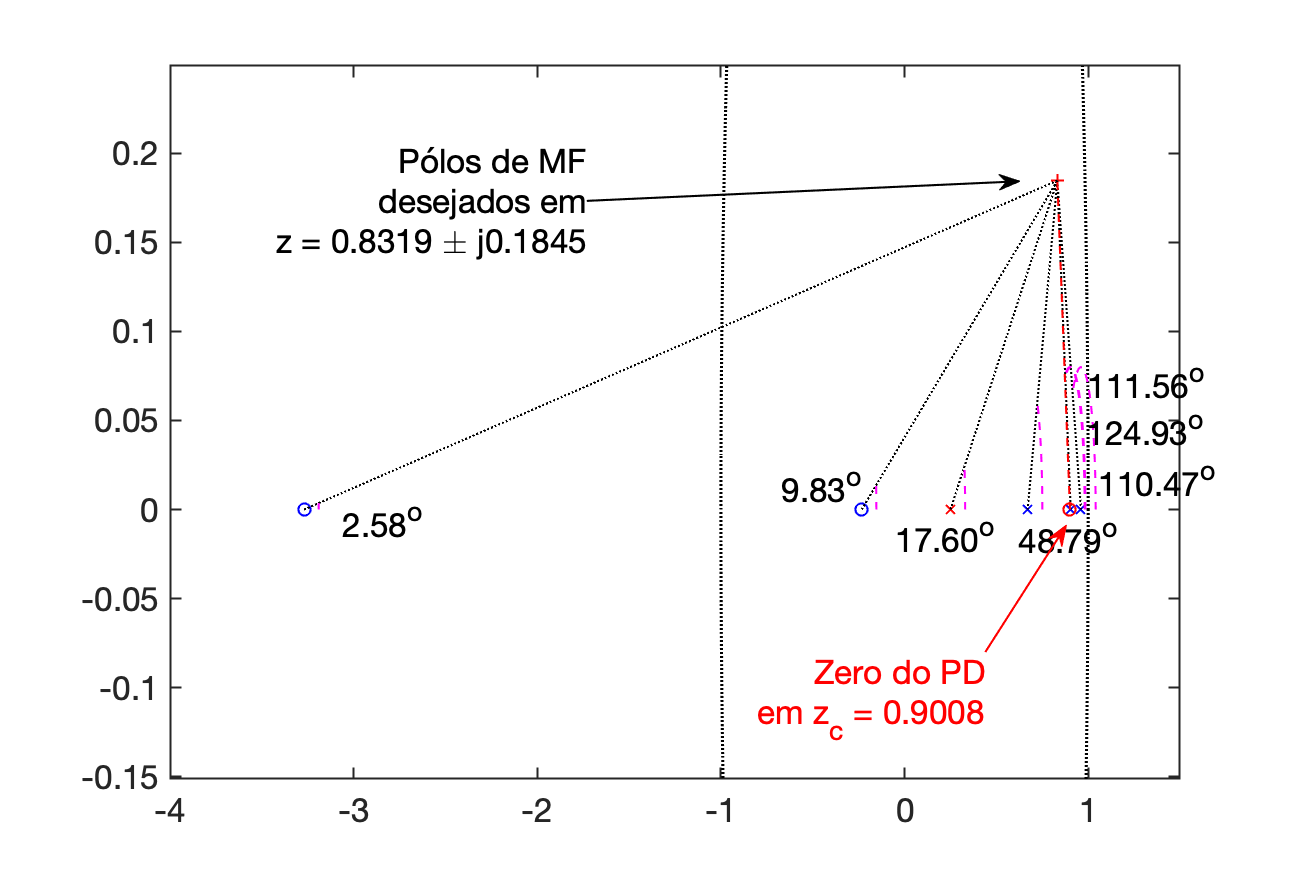
Angular contribution of each pole in the z-plane:
p1 = 0.9608 --> 124.93^o
p2 = 0.9048 --> 111.56^o
p3 = 0.6703 --> 48.79^o
p4 = 0.2500 --> 17.60^o
Sum of angular contribution of poles: 302.87^o
Check the figure window -> Paused (enter to continue)...
Angular contribution of each zero in the z-plane:
z1 = -3.2702 --> 2.58^o
z2 = -0.2335 --> 9.83^o
Sum of angular contribution of zeros: 12.40^o
Final angle for the zero of C(z): 110.4714^o
Ok, determining the position for zero of C (z)...
Final position for the Lead zero: z_c=0.9008
Updating final RL graph...
The Lead controller final result is (variable C):
ans =
(z-0.9008)
----------
(z-0.25)
Sample time: 0.02 seconds
Discrete-time zero/pole/gain model.
Notamos alguns detalhes:
-
O script angulos2.m só calcula o local do zero do controlador. Não permite arbitar um local para o zero e depois calular o valor do pólo do controlador. O usuário do mesmo deve determinar (arbitrar) inicialmente o local do pólo do controlador ⚠️.
-
O pólo deste controlador foi arbitrado num local abaixo do pólo mais lento da planta (em
). Isto é, se o pólo do filtro foi colocado numa posição superior ao pólo mais rápido da planta, significa que a resposta temporal deste pólo vai ser afetada (reduzida) pelo filtro. Na prática, costumamos definir a frequência de corte do filtro passa-baixas, uma década abaixo da frequência (pólo) mais rápida do sistema. Motivo pelo qual o local arbitrado para o pólo deste controlador foi em . Lembrando da eq. da planta no plano-s, notamos que o pólo mais rápido está localizado em
. Este pólo quando o sistema foi amostrado à taxa de Hz, ficou localizado no plano-z em (note que ). Este pólo em equivale a uma frequência de: Hz. Isto implica que a freq. de corte do filtro deveria fica uma década acima disto, ou em Hz. O pólo deste filtro no plano-z resulta na posição: . Neste caso em particular, definir o pólo em é como estabelar a freq. de corte do filtro em: Hz. Isto significa que neste caso, nosso filtro está com freq. de corte quase acima da freq. máxima da planta ( ). -
O script angulos2.m gera 2 gráficos, um da contribuição angular e outro do RL final já considerando todos os dados do controlador sendo projetado.
Depois de realizar alguns ajustes de escala (range) nos gráficos gerados, temos:
-
Gráfico da contribuição angular:
Mas antes de usar o RL para definir o ganho do controlador e acabar perdendo conteúdo (variáveis) calculadas usando o script, vamos passar alguns dados calculados para outra variáveis para eventual uso posterior:
Depois de executar angulos2.m, note o seguinte:
>> zpk(ftma) % FTMA(z) da planta + controlador completo recém projetado:
ans =
0.00046711 (z+3.27) (z-0.9008) (z+0.2335)
-----------------------------------------
(z-0.9608) (z-0.9048) (z-0.6703) (z-0.25)
Sample time: 0.02 seconds
Discrete-time zero/pole/gain model.
>> zpk(C) % C(z) do controlador recém projetado:
ans =
(z-0.9008)
----------
(z-0.25)
Sample time: 0.02 seconds
Discrete-time zero/pole/gain model.
Salvando alguns dados e continuando com o projeto:
>> ftma_Lead = ftma; % "salva" o ftma recém calculado
>> Lead = C; % "salva" a eq. do controlador
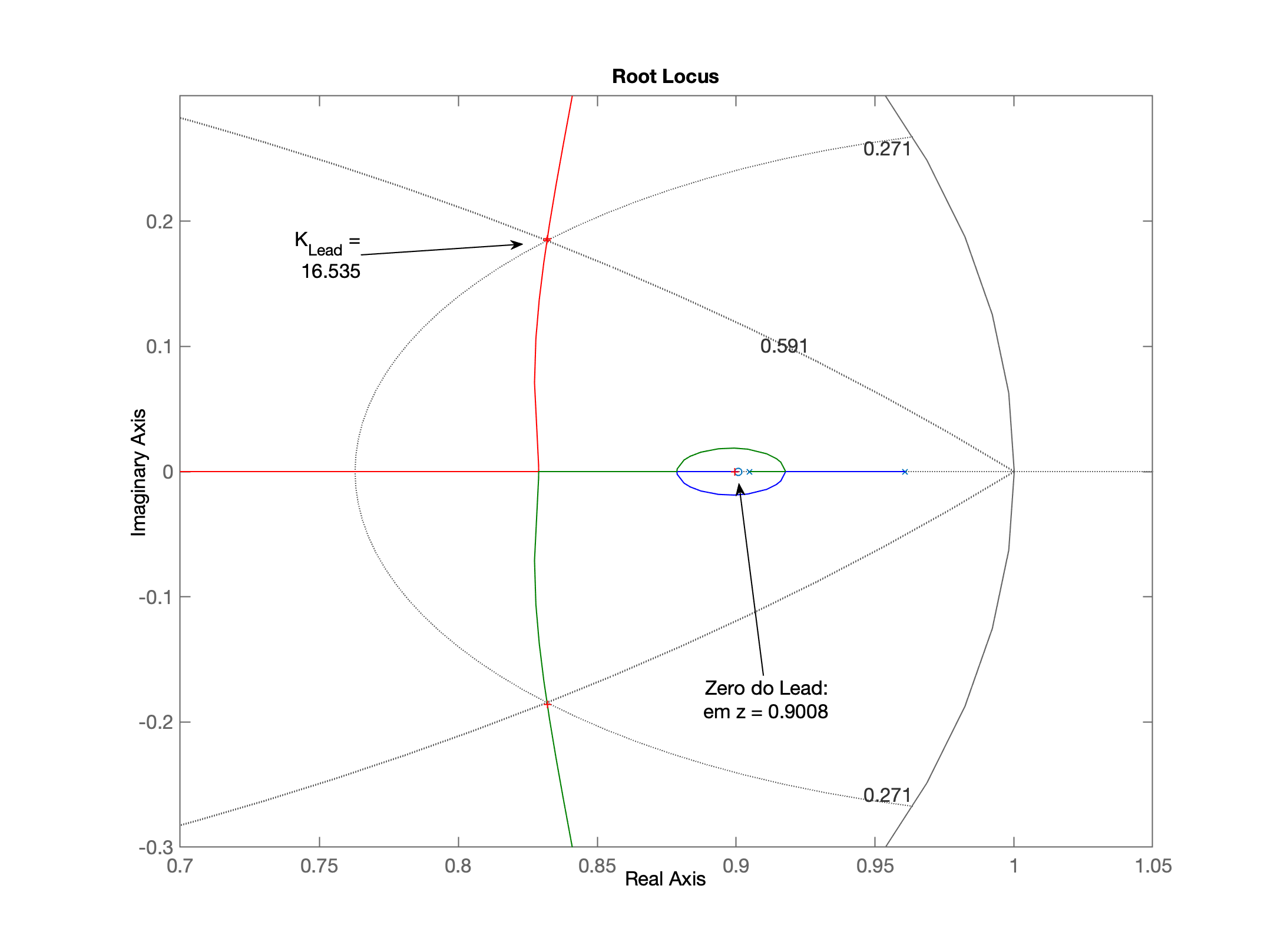
>> [K_Lead,polosMF_Lead]=rlocfind(ftma_Lead)
Select a point in the graphics window
selected_point =
0.83191 + 0.18597i
K_Lead =
16.535
polosMF_Lead =
0.89947 + 0i
0.83202 + 0.18596i
0.83202 - 0.18596i
0.21472 + 0i
Temos o RL ressaltando alguns dados importantes:
Fechando a malha...
>> K_Lead = 17;
>> ftmf_Lead = feedback(K_Lead*ftma_Lead, 1);
>> pole(ftmf_Lead)
ans =
0.89952 + 0i
0.83229 + 0.18994i
0.83229 - 0.18994i
0.2139 + 0i
>> figure; step(ftmf_Lead, ftmf_PD4)
>>legend('Lead', 'PD4')
E temos a resposta ao degrau unitário para este sistema:
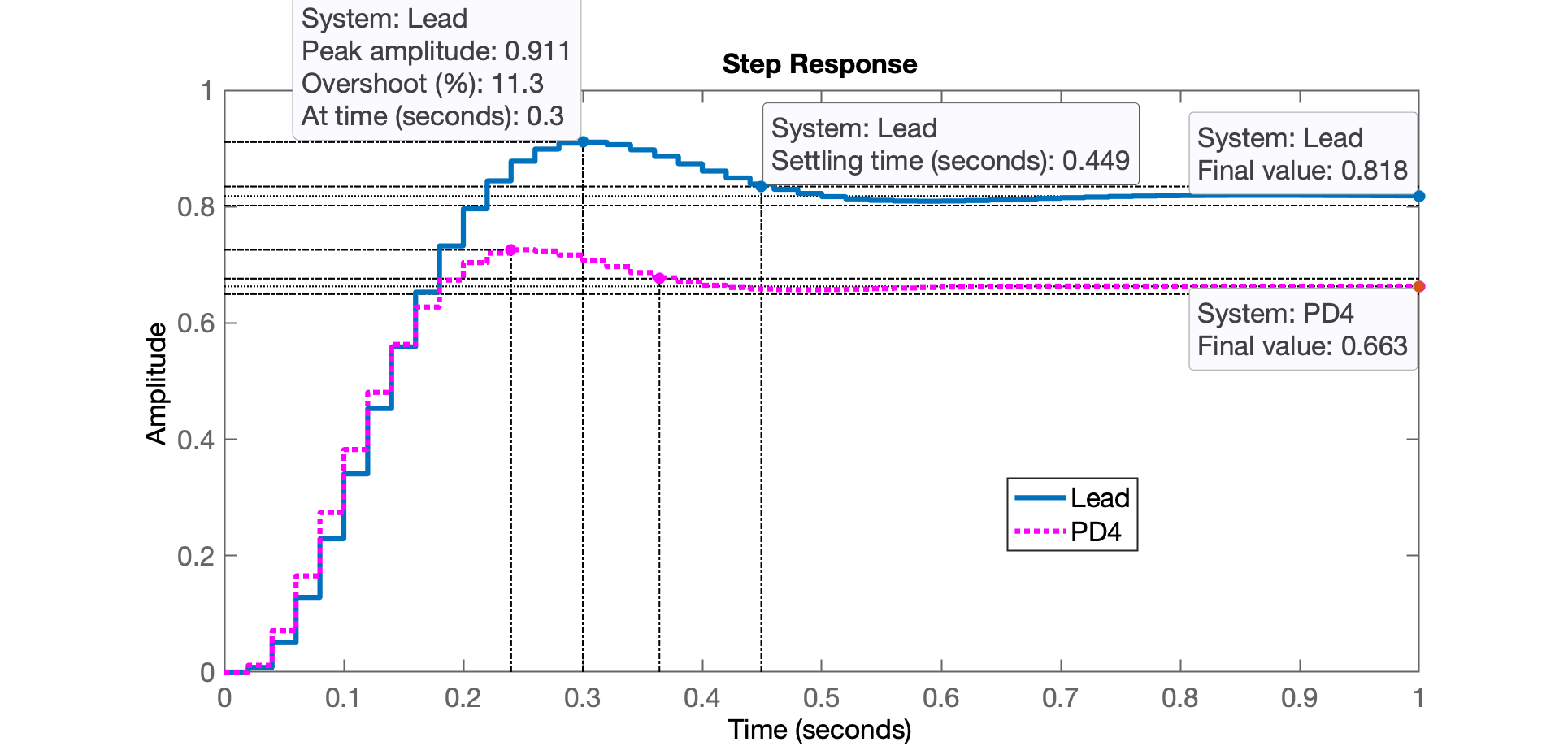
>> stepinfo(ftmf_Lead)
RiseTime: 0.14
SettlingTime: 0.46
SettlingMin: 0.79616
SettlingMax: 0.91086
Overshoot: 11.343
Undershoot: 0
Peak: 0.91086
PeakTime: 0.3
>> erro_Lead = (1 - dcgain(ftmf_Lead))/1*100
erro_Lead =
18.194
O que acontece se é especificado um
A questão que ficou anteriormente é: - Consigo um Lead mais rápido?
Vamos testar o valor:
>> angulos2
PD/Lead Controller Design
In this version you should arbitrate the initial position of the pole of C(z)
Plant (in s-plan) informed, G(s):
ans =
400
------------------
(s+20) (s+5) (s+2)
Continuous-time zero/pole/gain model.
Sampling time informed: T=0.02
Plant in discrete form, BoG(z):
ans =
0.00046711 (z+3.27) (z+0.2335)
--------------------------------
(z-0.9608) (z-0.9048) (z-0.6703)
Sample time: 0.02 seconds
Discrete-time zero/pole/gain model.
Maximum overshoot desired (%OS), in %: ? 10
zeta (damping factor) should be: 0.5912
Enter desired settling time, t_s: ? 0.4
It results in the natural oscillation frequency, wn = 16.9160 (rad/s)
The MF poles (in the s-plane) should be located in:
10.0000 +/- j13.6438
Localization of MF poles in the z-plane should be:
z = 0.7884 +/- j0.2206
Enter the position of the controller pole (z-plane): ? 0.25
Working with the temporary FTMA(z)...
Open poles = 0.960789
Open poles = 0.904837
Open poles = 0.67032
Open poles = 0.25
Open zeros = -3.27018
Open zeros = -0.233457
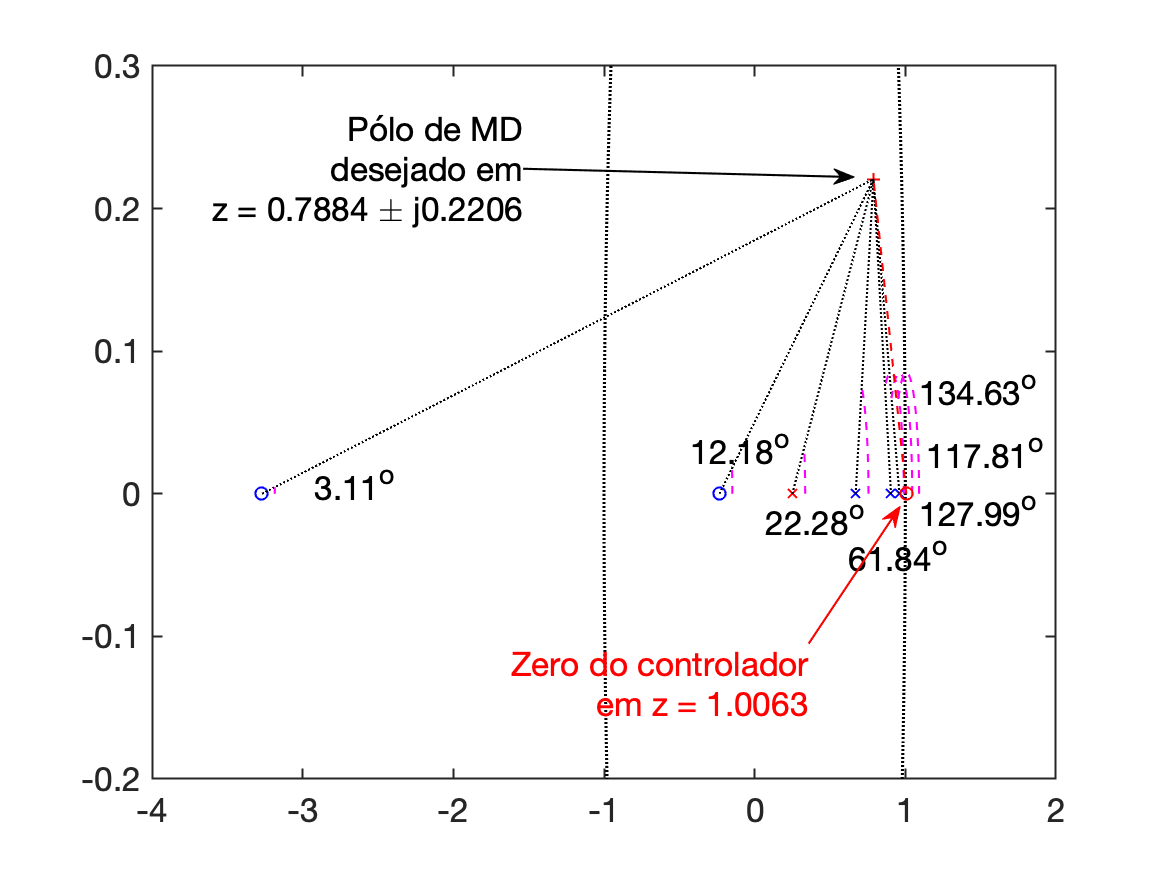
Angular contribution of each pole in the z-plane:
p1 = 0.9608 --> 127.99^o
p2 = 0.9048 --> 117.81^o
p3 = 0.6703 --> 61.84^o
p4 = 0.2500 --> 22.28^o
Sum of angular contribution of poles: 329.93^o
Check the figure window -> Paused (enter to continue)...
Angular contribution of each zero in the z-plane:
z1 = -3.2702 --> 3.11^o
z2 = -0.2335 --> 12.18^o
Sum of angular contribution of zeros: 15.30^o
Final angle for the zero of C(z): 134.6333^o
Ok, determining the position for zero of C (z)...
Final position for the Lead zero: z_c=1.0063
Updating final RL graph...
The Lead controller final result is (variable C):
ans =
(z-1.006)
---------
(z-0.25)
Sample time: 0.02 seconds
Discrete-time zero/pole/gain model.
Aqui é bom ter percebido certos detalhes:
-
O zero ddo controlador calculado pelo algoritmo ficou fora do círculo unitário (Ok, ainda é um zero de malha-aberta). Mas... dependendo do valor do ganho que será adotado para fechar a malha, poderá implicar em pólos de MF instáveis!
Uma "espiada" no gráfico da contribuição angular gerado desta vez, revela:
-
Zeros instáveis afetam o ganho final do sistema (amplitude em regime permanente) do sistema.
Então, já são esperados problemas, mas vamos continuar o projeto apenas para comprovar que tipo de problemas serão enfrentados se insistimos em continuar este controlador.
>> Lead2 = C; % salvando dados para uso posterior
>> ftma_Lead2 = ftma; % salvando dados para uso posterior
>> axis([0.7 1.05 -0.3 0.3]) % realizando zoom na região de interesse
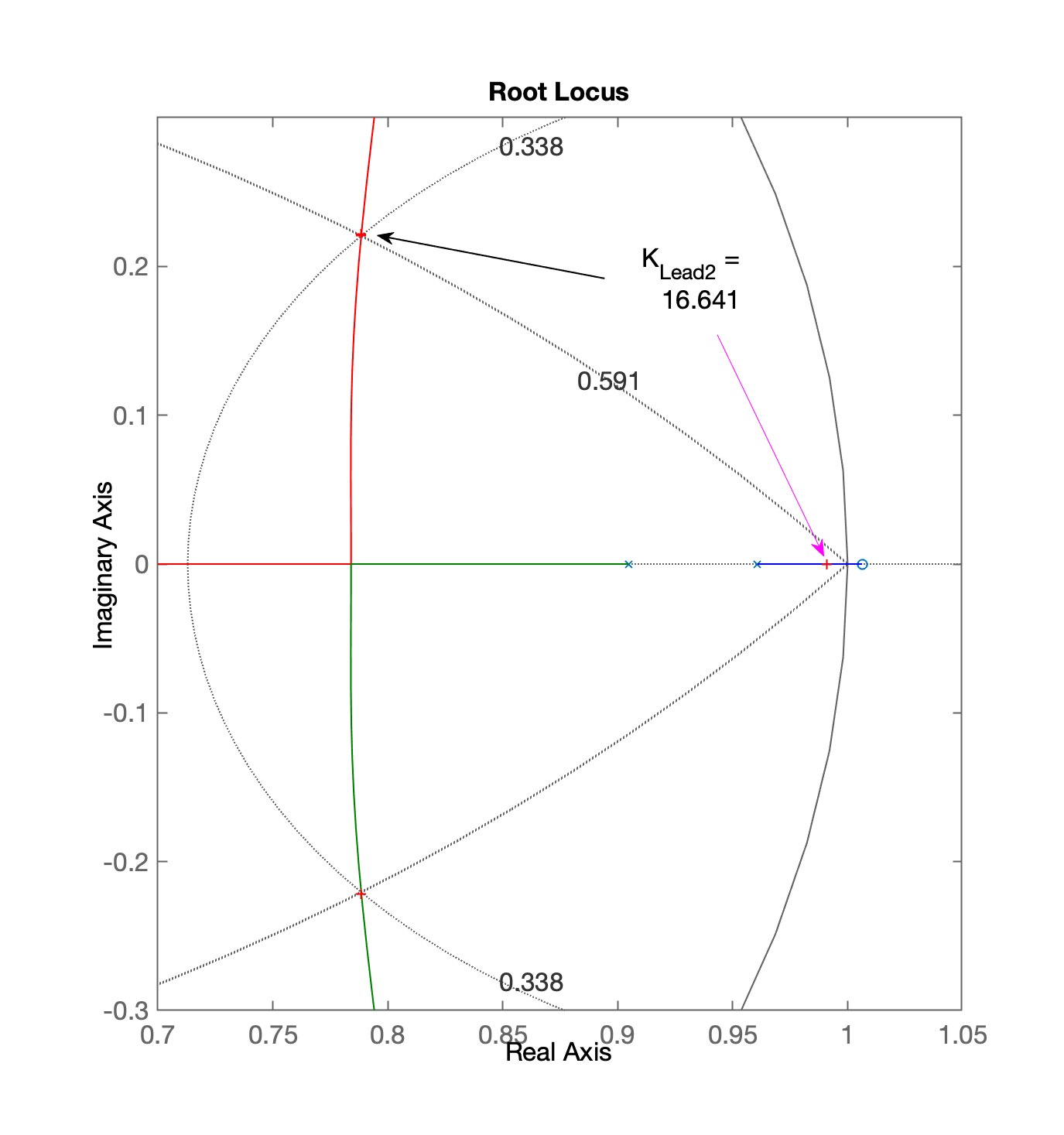
>> [K_Lead2,polosMF_Lead2]=rlocfind(ftma_Lead2)
Select a point in the graphics window
selected_point =
0.78873 + 0.22148i
K_Lead2 =
16.641
polosMF_Lead2 =
0.99102 + 0i
0.78849 + 0.22149i
0.78849 - 0.22149i
0.21018 + 0i
Obs.: neste caso em particular, os pólos de MF ainda ficaram estáveis (mas por muito pouco, note o pólo real em
O RL mostrando o ganho adotado e onde ficaram os pólos de MF aparece à seguir:
Fechando a malha:
>> ftmf_Lead2 = feedback(K_Lead2*ftma_Lead2, 1);
pole(ftmf_Lead2)
ans =
0.99102 + 0i
0.78849 + 0.22149i
0.78849 - 0.22149i
0.21018 + 0i
>> figure; step(ftmf_Lead2)
E temos então:
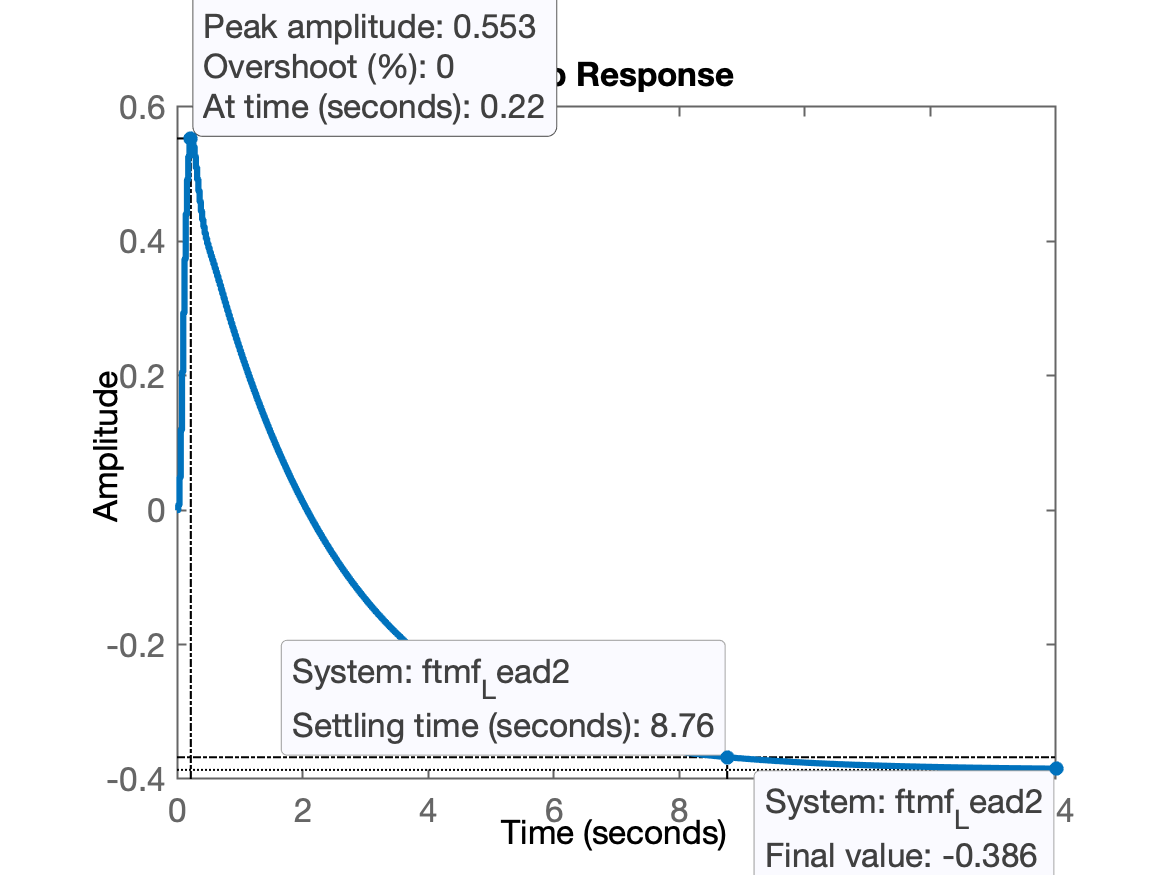
Obviamente está longe de ser a resposta desejada.
Salvando dados para a próxima aula:
>> save planta
>> diary off
Fernando Passold, em 11/11/2023