Projeto Controladores Ação Derivativa
Reiniciando seção de trabalho
Recomeçando as atividades, desde a aula de 29/09/2023:
>> diary aula_27oct2023.txt % iniciando outro registro das atividades
>> pwd % diretório atual de trabalho
ans =
'/Volumes/DADOS/fpassold (DADOS)/Documents/UPF/Controle_3/2023_2'
>> load planta % recupera dados aula passada
Projeto de PD1
Referência: Projeto de Controlador PD (Aula de 28/05/2020):
Lembrando da eq. do PD:
ou em resumo:
Incógnita: zero do PD:
Lembrando da eq. da planta:
>> zpk(BoG)
ans =
0.00046711 (z+3.27) (z+0.2335)
--------------------------------
(z-0.9608) (z-0.9048) (z-0.6703)
Sample time: 0.02 seconds
Discrete-time zero/pole/gain model.
Segue "estudo de casos" para localização do zero do PD.
Podemos alocar o zero do PD nas seguintes opções:
(entre o pólo + lento da planta e o círculo unitário); (entre os 2 pólos + lentos da planta); (entredo os 2 pólos + "internos" da planta);
Podemos esboçar RL's para tentar prever o comportamento do sistema em MF:
%
Analisando as figuras, percebemos uma 4a-opção mais interessante, que seria tentar anular o pólo mais lento da planta usando o zero do PD. Neste caso, os "próximos" pólos à partir dos quais partiriam novas curvas do RL, seriam, as que que partem dos outros 2 pólos mais "iternos" da planta, com ponto de partida entre
>> % Extraíndo o dado do polo mais lento
>> [numd,dend]=tfdata(BoG,'v')
numd =
0 0.00046711 0.0016366 0.00035661
dend =
1 -2.5359 2.1199 -0.58275
>> polos_BoG=roots(dend)
polos_BoG =
0.96079
0.90484
0.67032
>> % Ou poderíamos simplesmente ter feito:
>> polos_BoG=pole(BoG)
polos_BoG =
0.96079
0.90484
0.67032
>> % Note, o polo que nos interessa é o 1o do vetor polos_BoG()
polos_BoG(1)
ans =
0.96079
>> % Motando a eq. do PD
>> PD4=tf([1 -polos_BoG(1)], [1 0], T)
PD4 =
z - 0.9608
----------
z
Sample time: 0.02 seconds
Discrete-time transfer function.
>> % continuando com os cálculos...
>> ftma_PD4 = PD4*BoG; % Verificando o cancelamento...
zpk(ftma_PD4)
0.00046711 (z+3.27) (z-0.9608) (z+0.2335)
-----------------------------------------
z (z-0.9608) (z-0.9048) (z-0.6703)
Sample time: 0.02 seconds
Discrete-time zero/pole/gain model.
Note o que está acontecendo:
Podemos forçar este cancelamento no Matlab usando a função minreal():
>> ftma_PD4r = minreal(ftma_PD4);
zpk(ftma_PD4r)
ans =
0.00046711 (z+3.27) (z+0.2335)
------------------------------
z (z-0.9048) (z-0.6703)
Sample time: 0.02 seconds
Discrete-time zero/pole/gain model.
Continuando com os cálculos:
>> rlocus(ftma_PD4)
>> hold on; zgrid(zeta,0)
>> axis ([-0.2 1.1 -0.2 1.1]) % "zoom" na área de interesse
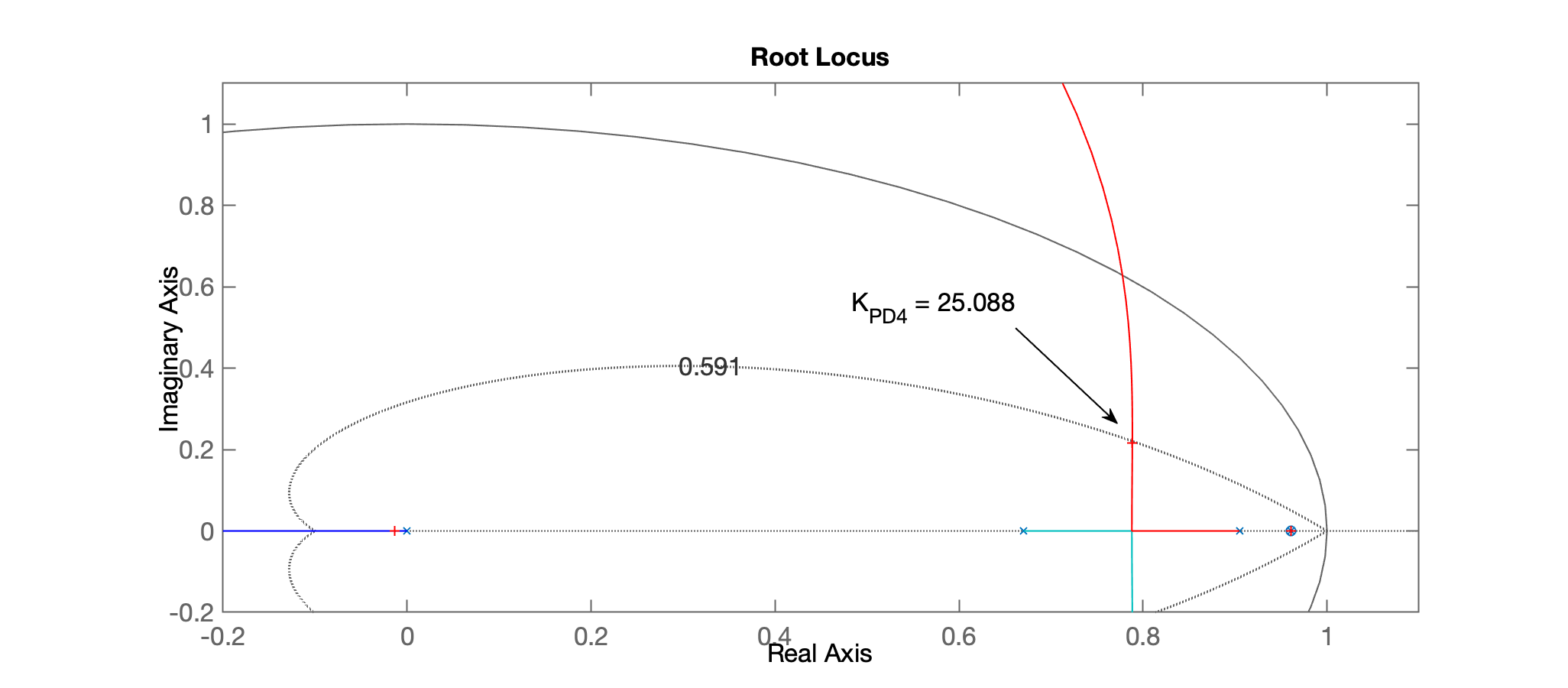
>> [K_PD4,polosMF_PD4] = rlocfind(ftma_PD4)
Select a point in the graphics window
selected_point =
0.78928 + 0.21702i
K_PD4 =
25.088
polosMF_PD4 =
0.96079 + 0i
0.78841 + 0.21702i
0.78841 - 0.21702i
-0.01338 + 0i
Desta forma, obtivemos o seguinte RL, mostrando o ganho adotado e locais dos outros pólos de MF:
Continuando...
K_PD = 25;
ftmf_PD4 = feedback(K_PD4*ftma_PD4, 1);
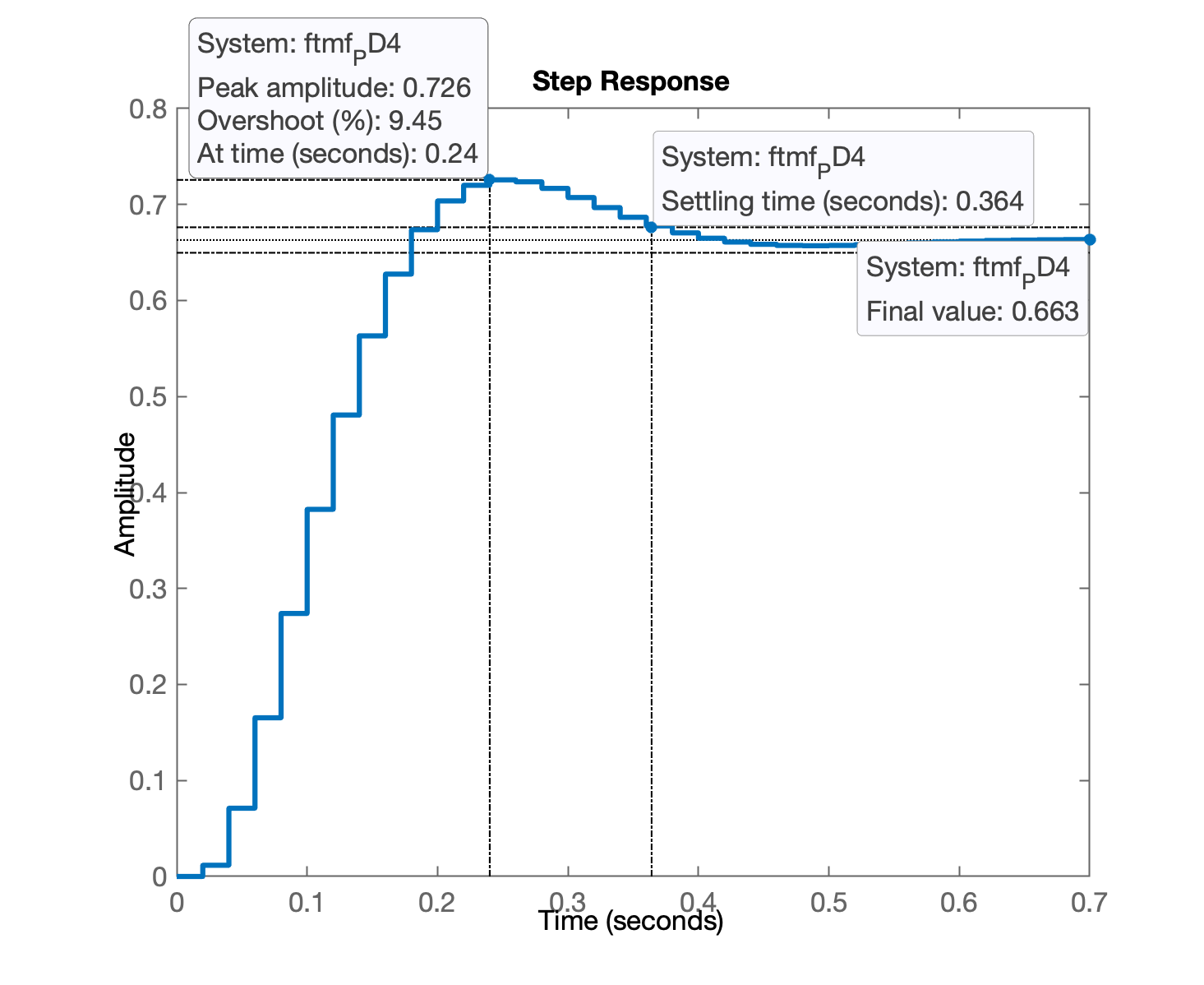
figure; step(ftmf_PD4)
stepinfo(ftmf_PD4)
ans =
RiseTime: 0.12
SettlingTime: 0.38
SettlingMin: 0.6275
SettlingMax: 0.72566
Overshoot: 9.4498
Undershoot: 0
Peak: 0.72566
PeakTime: 0.24
>> erro_PD4 = (1 - dcgain(ftmf_PD4))/1*100
erro_PD4 =
33.699
Segue gráfico da resposta do sistema em MF para entrada degrau unitário:
Comparando esta resposta com outros controladores
>> figure; step(ftmf_K_OS10, ftmf_PI5, ftmf_PD4)
>> legend('K (%OS=10%)', 'PI5', 'PD4')
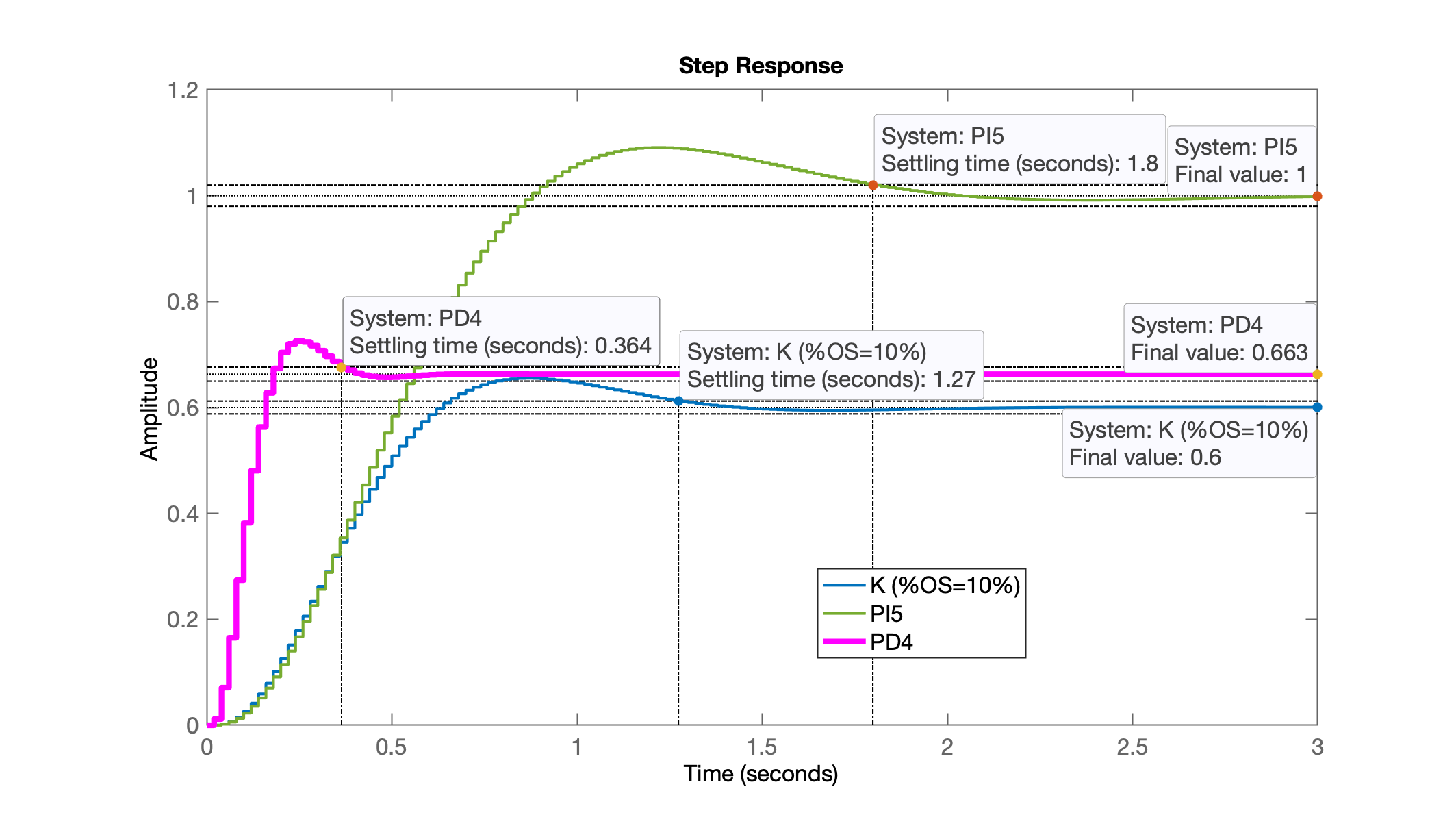
Continuando...
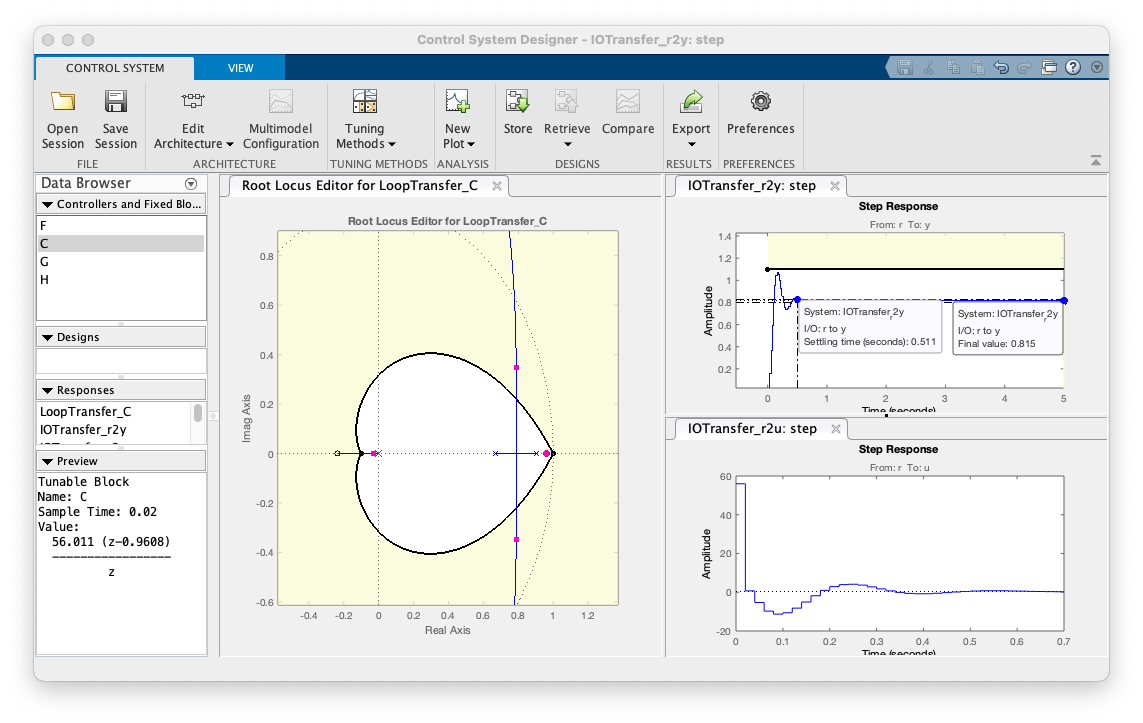
Melhoras com App Control System Designer
Simulando um caso mais real, sem o cancelamento pólo-zero.
Na prática, vamos nos aproximar mais do caso 2. Neste caso:
Usando o App do Control System Designer para verificar este resultado (e outros).
Obs.: Arquivo do projeto neste App: ControlSystemDesignerSession_PD4.mat
Note que aumentamos o ganho do PD4 para
Encerrando atividades
>> save planta
>> diary off
Fernando Passold, em 27/10/2023.