Projeto Controladores
Continuação da aula anterior, de 28/04/2025, Projeto de PDs.
Recuperando dados da aula passada, arquivo: dados.mat.
Projeto de Lead (1)
Lembrando da planta:
x>> zpk(BoG)ans = 0.00012224 (z+2.747) (z+0.1903) -------------------------------- (z-0.9048) (z-0.8187) (z-0.3679) Sample time: 0.1 secondsDiscrete-time zero/pole/gain model.O PD, opção (c) (aula passada), chegou à equação:
Mantendo o zero do Lead na mesma posição do zero dos PD's anteriores, falta apenas definir a posição do pólo para o Lead. Este pólo correspondeo ao pólo do filtro passa-baixas incorporado ao PD). Como nbão queremos filtrar as respostas dinâmicas do pólo mais rápido da planta: .
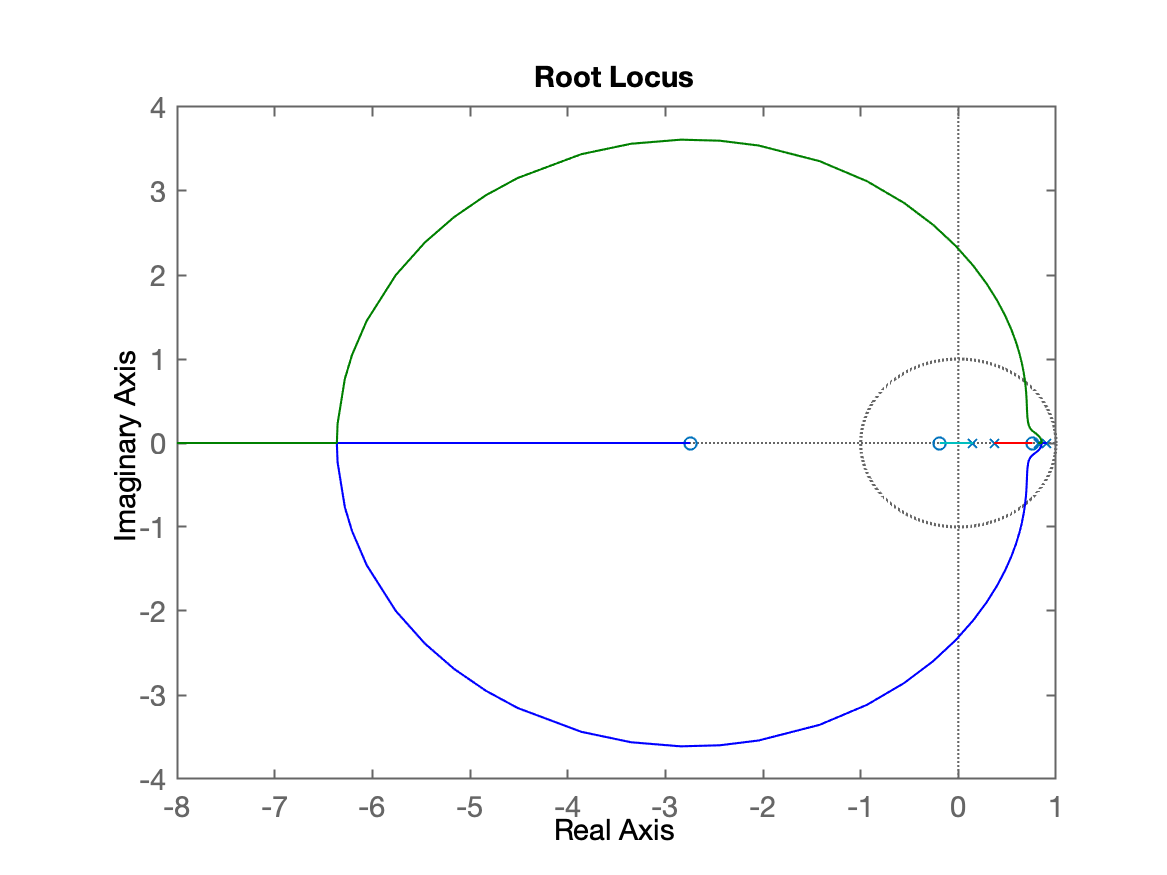
xxxxxxxxxx>> Lead=tf([1 -0.76],[1 -0.15],T)Lead = z - 0.76 -------- z - 0.15 Sample time: 0.1 secondsDiscrete-time transfer function.>>ftma_Lead=Lead*BoG;>> rlocus(ftma_Lead)>> axis equal>> axis([-8 1 -4 4])RL da plata + Lead:
"Sintonizando" este controlador...
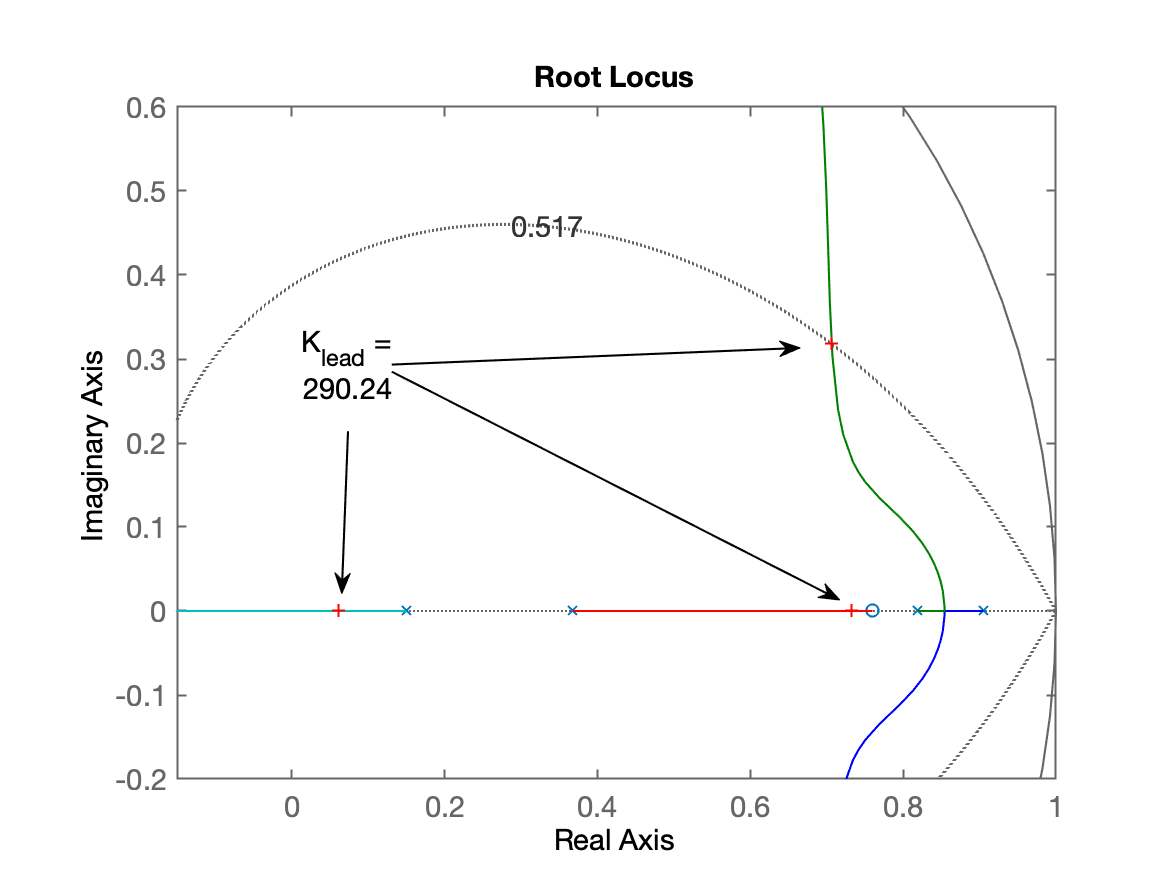
xxxxxxxxxx>> axis([-0.15 1 -0.2 0.6]) % zoom na região de interesse>>hold on>> zgrid(zeta,0)>> [K_lead,polosMF]=rlocfind(ftma_Lead)Select a point in the graphics windowselected_point = 0.70705 + 0.31889iK_lead = 290.24polosMF = 0.70646 + 0.31885i 0.70646 - 0.31885i 0.73216 + 0i 0.060893 + 0iE assim temos o RL:
xxxxxxxxxx>> % Fechando a malha>> ftmf_Lead=feedback(K_lead*ftma_Lead, 1);>> figure; step(ftmf_Lead, ftmf_PDc)>> legend('Lead', 'Pd (c)') % comparando com PD(c)Resposta ao degrau em MF comparando com PD (c) projetado na aula passada:
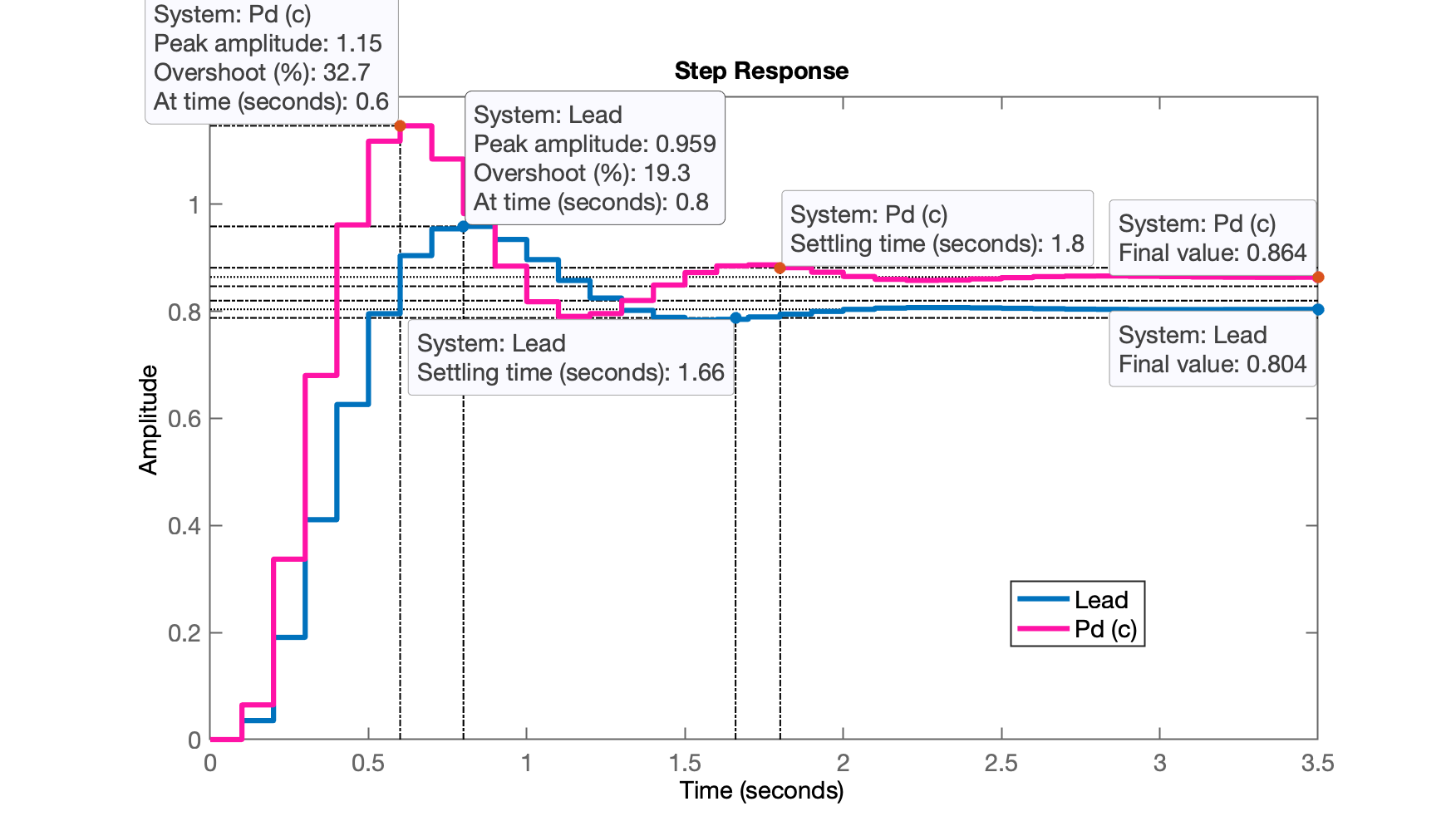
xxxxxxxxxx>> erro_Lead=((1-dcgain(ftmf_Lead))/1)*100erro_Lead = 19.618Melhorando este PD:
Projeto de Lead (2)
Versão 2 do lead susando o App Control System Designer:
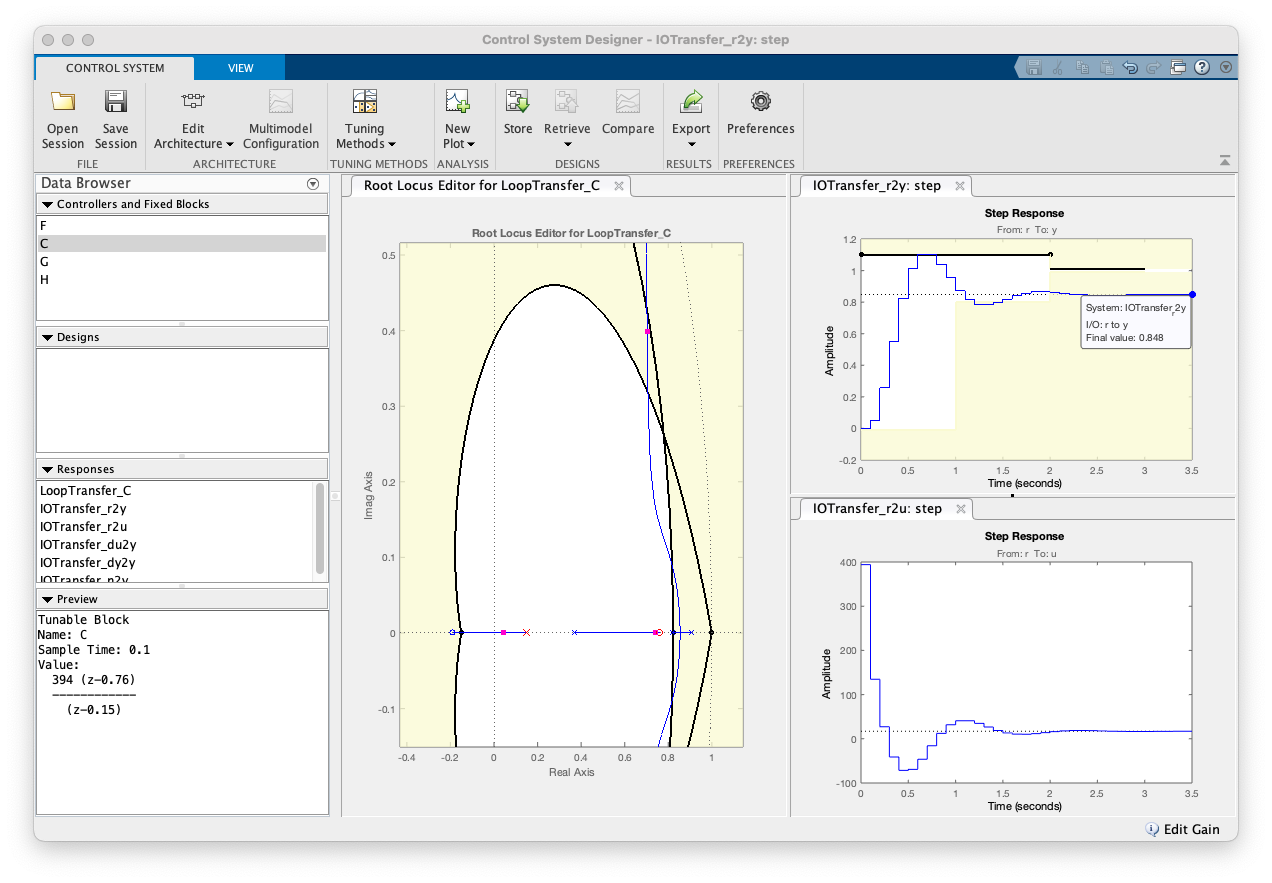
xxxxxxxxxx>> % Exportado controlador C para Lead2>> zpk(Lead2)ans = 394 (z-0.76) ------------ (z-0.15) Name: CSample time: 0.1 secondsDiscrete-time zero/pole/gain model.Podemos modificar a posição do zero do Lead, quase cancelando o 2o-pólo mais rápido da planta em , para obter um controlador mais rápido (ver PD(d) da aula passada).
Projeto de Lead (3)
Usando App Control System Designer, vamos aproveitar e modificar posição do zero do Lead, colocando-o próximo de .
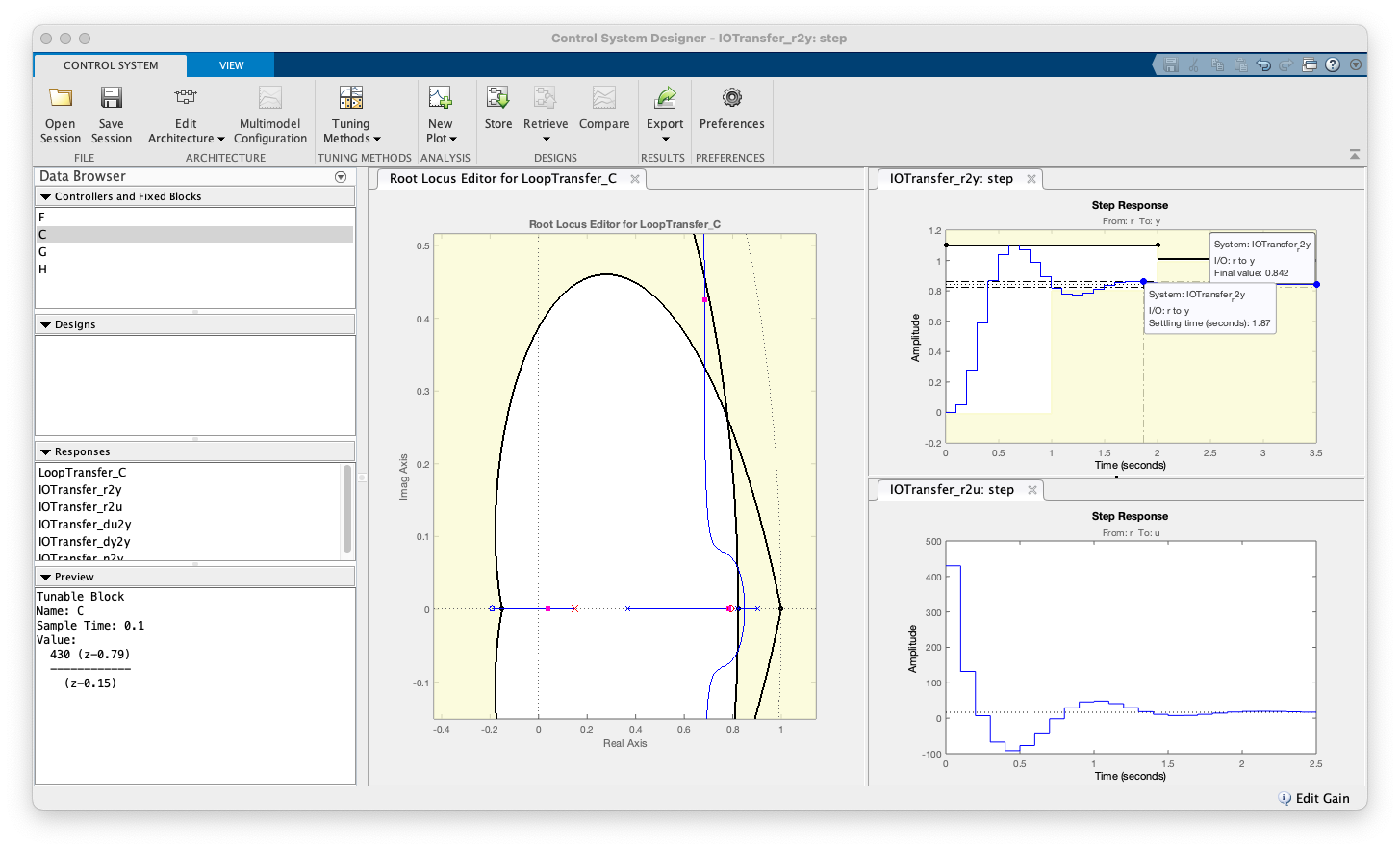
xxxxxxxxxx>> % Exporando controlador C para Lead3>> zpk(Lead3)ans = 430 (z-0.79) ------------ (z-0.15) Name: CSample time: 0.1 secondsDiscrete-time zero/pole/gain model.Finalizando seção de trabalho para próxima aula:
xxxxxxxxxx>> save dados>> diary offFernando Passold, em 05/05/2025