Projeto de Controladores (Digitais)
Aula de 27/03/204
Seja a seguinte planta:
Vamos amostrar esta planta à segundos.
Calculando :
x>> G=tf(1,poly([-1 -2 -10]));>> zpk(G) 1 ------------------ (s+10) (s+2) (s+1) Continuous-time zero/pole/gain model.>> T=0.1;>> BoG=c2d(G, T);>> zpk(BoG) 0.00012224 (z+2.747) (z+0.1903) -------------------------------- (z-0.9048) (z-0.8187) (z-0.3679) Sample time: 0.1 secondsDiscrete-time zero/pole/gain model.1. Controlador Proporcional
Suponha que o requisito de controle seja .
xxxxxxxxxx>> OS=10;>> zeta=(-log(OS/100))/(sqrt(pi^2+(log(OS/100)^2)))zeta = 0.59116>> % Traçando o RL>> rlocus(BoG)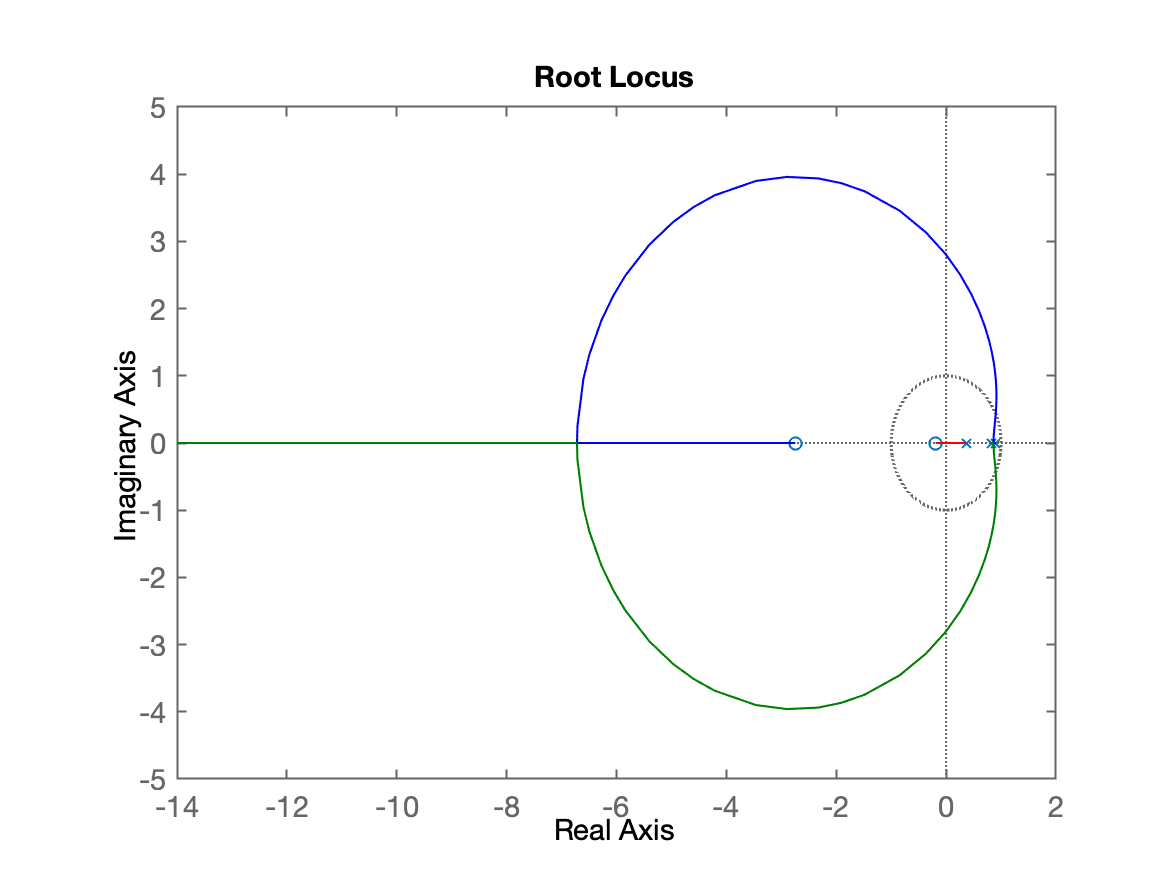
xxxxxxxxxx>> hold on; zgrid(zeta,0)>> axis([0.2 1.2 -0.3 0.7])>> [K, polosMF] = rlocfind(BoG)Select a point in the graphics windowselected_point = 0.8718 + 0.14427iK = 25.132polosMF = 0.87003 + 0.14445i 0.87003 - 0.14445i 0.34831 + 0i>> K=25;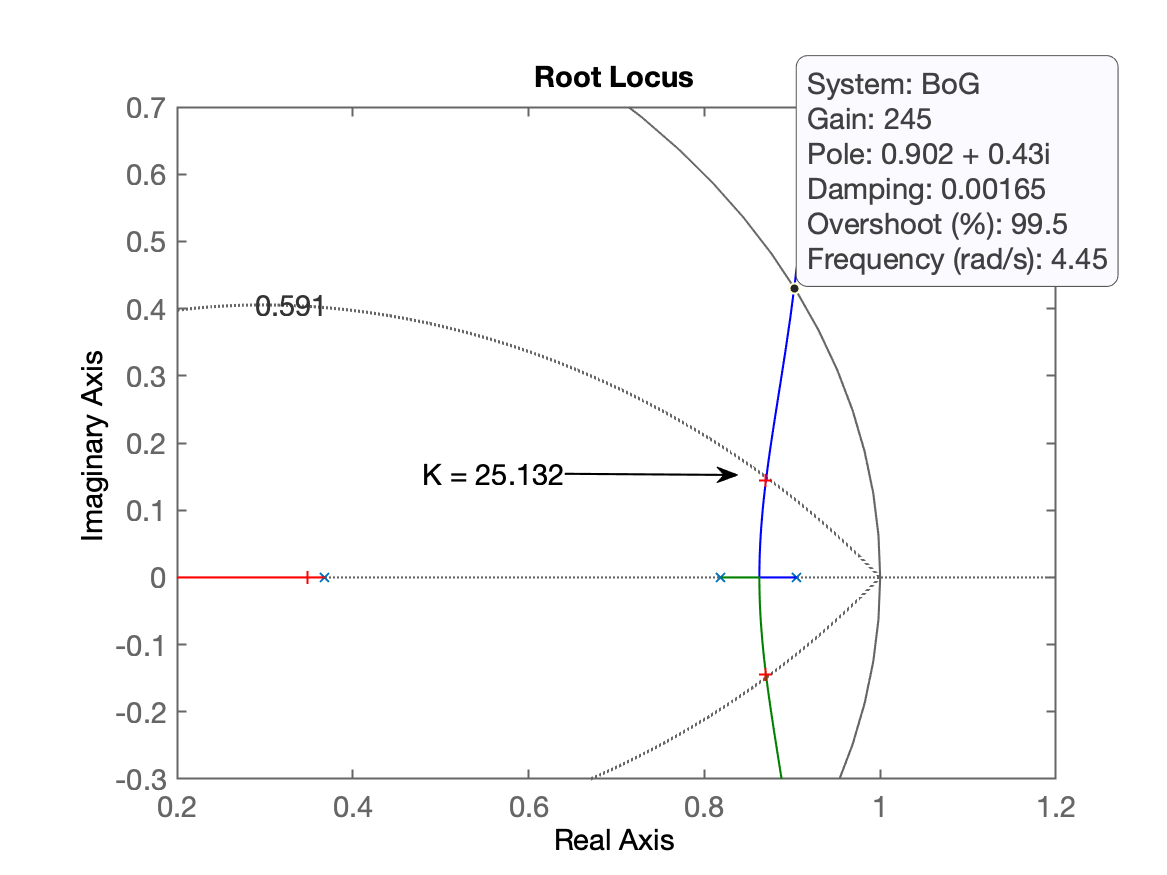
xxxxxxxxxx>> ftmf=feedback(K*BoG,1);>> pole(ftmf)ans = 0.86999 + 0.14405i 0.86999 - 0.14405i 0.34841 + 0i>> figure; step(1*ftmf)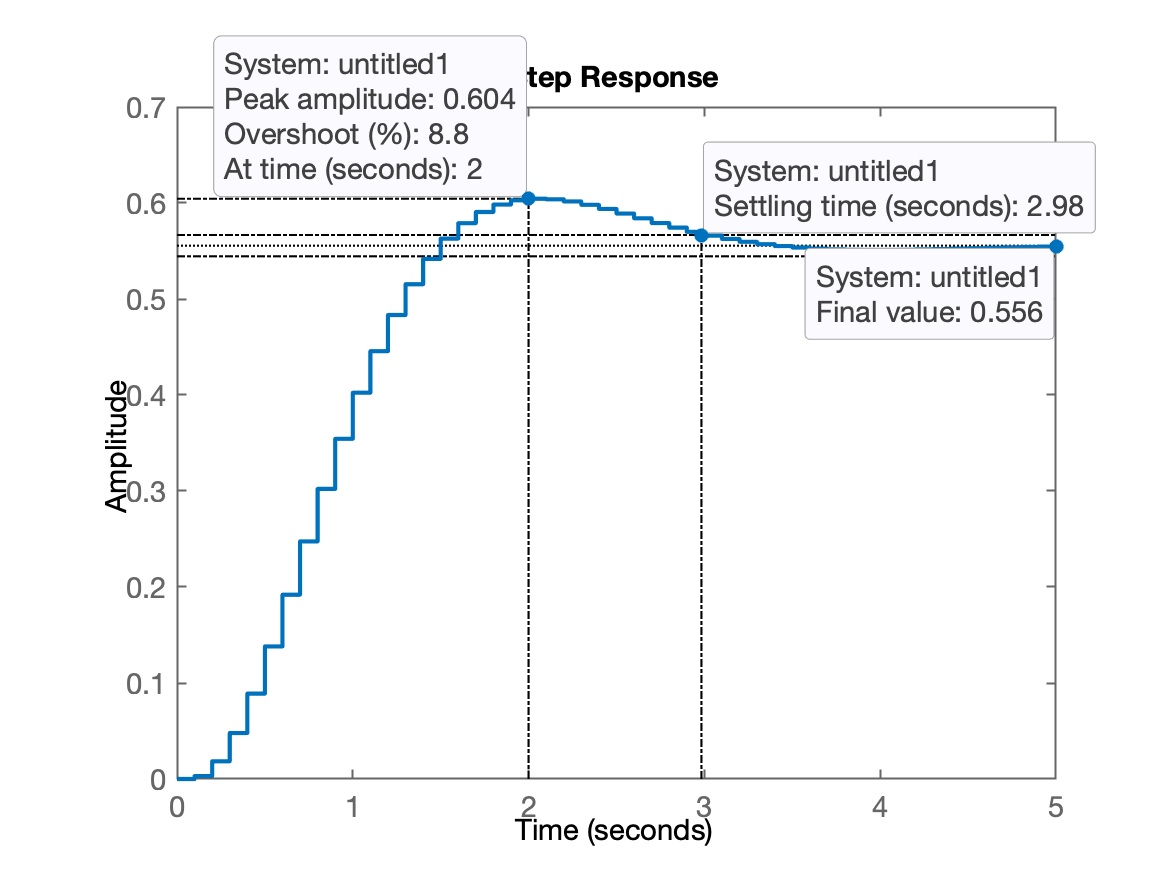
xxxxxxxxxx>> stepinfo(ftmf) RiseTime: 0.9 SettlingTime: 3 SettlingMin: 0.51537 SettlingMax: 0.60442 Overshoot: 8.7957 Undershoot: 0 Peak: 0.60442 PeakTime: 2Comentários: Nota-se que o sistema converge com erro:
xxxxxxxxxx>> dcgain(ftmf)ans = 0.55556>> erro=((1-dcgain(ftmf))/1)*100erro = 44.444Comentários: note que a referência era um degrau unitário, isto é, a saída deveria ter convergido para . Isto significa que posso aumentar o ganho.
Considerando que , e que se tolera um , temos então que .
Do RL anterior, percebemos entretanto que: .
Para Controladores Proporcionais Industrias, é usual fixar o ganho como de . Se fizermos isto, nossa planta vai reagir da seguinte forma:
xxxxxxxxxx>> K2=245/2K2 = 122.5>> ftmf2=feedback(K2*BoG,1);>> figure; step(ftmf2)>> stepinfo(ftmf2) RiseTime: 0.4 SettlingTime: 6.7 SettlingMin: 0.58335 SettlingMax: 1.3387 Overshoot: 55.731 Undershoot: 0 Peak: 1.3387 PeakTime: 1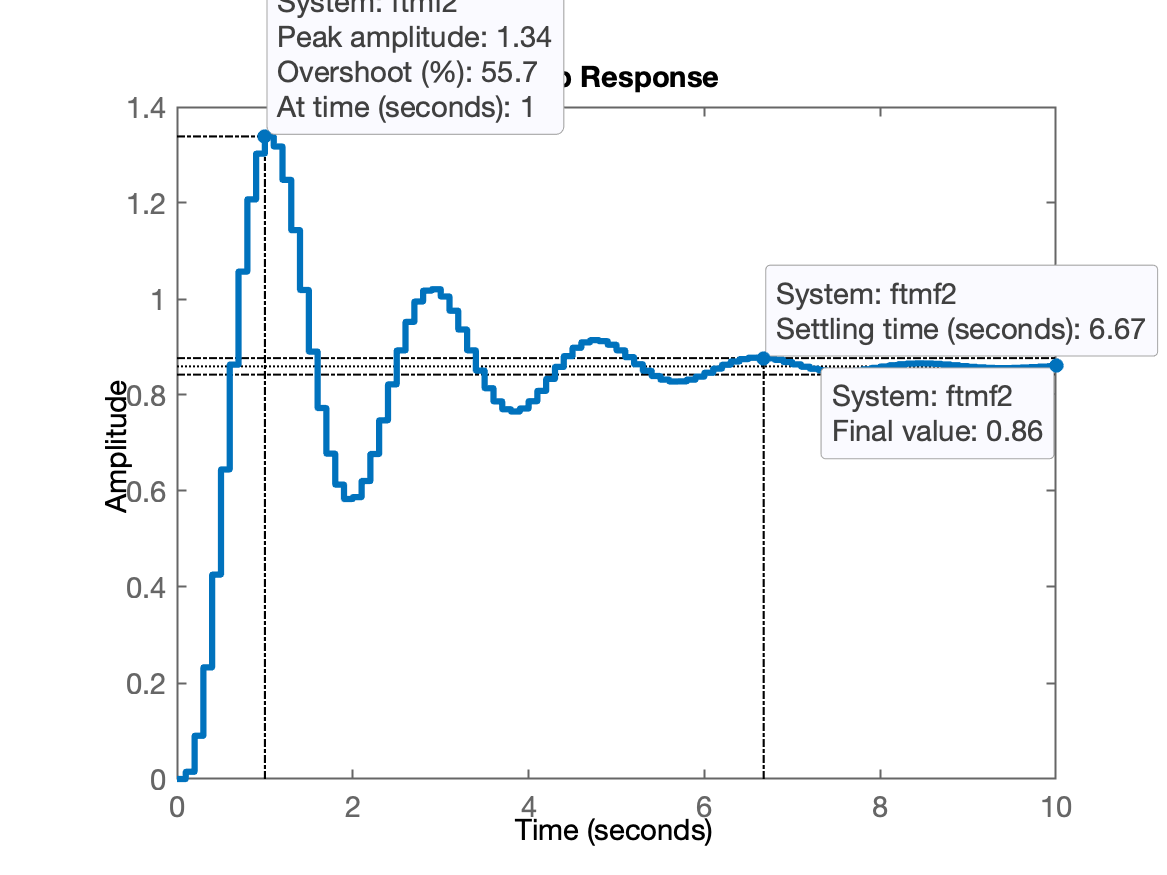
Comentários: desta vez, , isto significa um overshoot de 33,87%. Mas... percebemos que o tempo de assentamento "aumentou" para segundos.
Para manter o overshoot em 10% teríamos que trabalhar com um ganho: .
Determinando um valor intermediário:
xxxxxxxxxx>> K=(122.5+25)/2K = 73.75>> K3=70;>> ftmf3=feedback(K3*BoG,1);>> figure; step(ftmf3)>> stepinfo(ftmf3) RiseTime: 0.5 SettlingTime: 4.1 SettlingMin: 0.69 SettlingMax: 1.0349 Overshoot: 33.064 Undershoot: 0 Peak: 1.0349 PeakTime: 1.3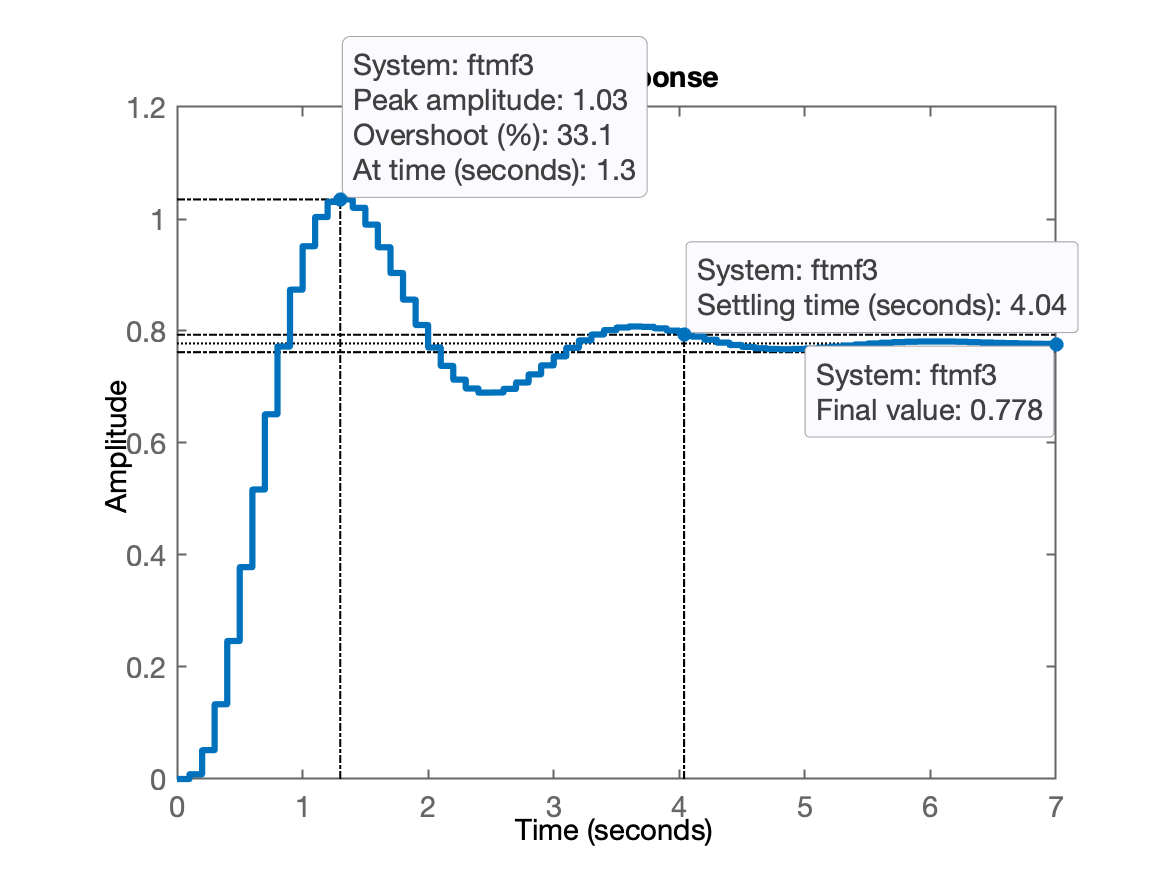
Desta vez, em relação à referência, o overshoot ficou em 3%. Isto significa que poderia talvez ter sido feito .
O erro neste caso ficou:
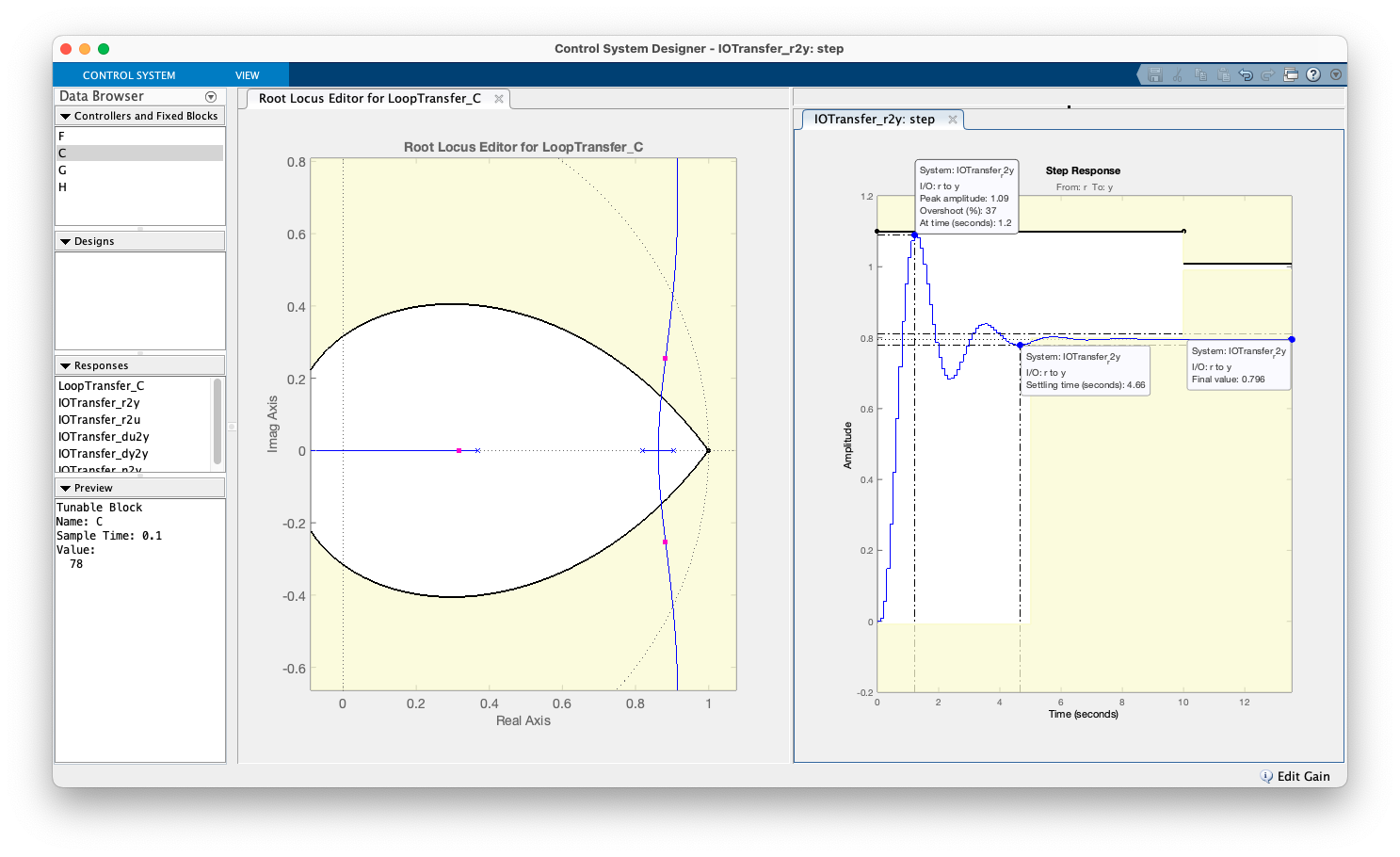
xxxxxxxxxx>> erro=((1-dcgain(ftmf3))/1)*100>> erro = 22.222Usando o "App Control Systems Designer"...
Outra opção Projeto Controlador Proporcional
O ganho de um controlador Proporcional poderia ainda ser definido em função do erro máximo permitido em regime permanente.
Para tanto, ver: https://fpassold.github.io/Controle_3/Controle3_2021_2/aula_1.html, que mostra como usar a Teoria do Erro, para determinar o valor do ganho em função do erro desejado.
2. Controlador Integrador Puro
Equação do controlador:
O pólo deste controlador fica localzado em (é o próprio integrador).
xxxxxxxxxx>> C_I=tf(1,[1 -1])C_I = 1 ----- s - 1 Continuous-time transfer function.>> % Ops... ingressado TF no plano-s (mundo contínuo)>> C_I=tf(1,[1 -1], T)C_I = 1 ----- z - 1 Sample time: 0.1 secondsDiscrete-time transfer function.>> ftma_I=C_I*BoG;>> zpk(ftma_I) 0.00012224 (z+2.747) (z+0.1903) -------------------------------------- (z-1) (z-0.9048) (z-0.8187) (z-0.3679) Sample time: 0.1 secondsDiscrete-time zero/pole/gain model.>> figure; rlocus(ftma_I)>> axis equal>> axis([-4 2 -1.5 1.5])>> axis equal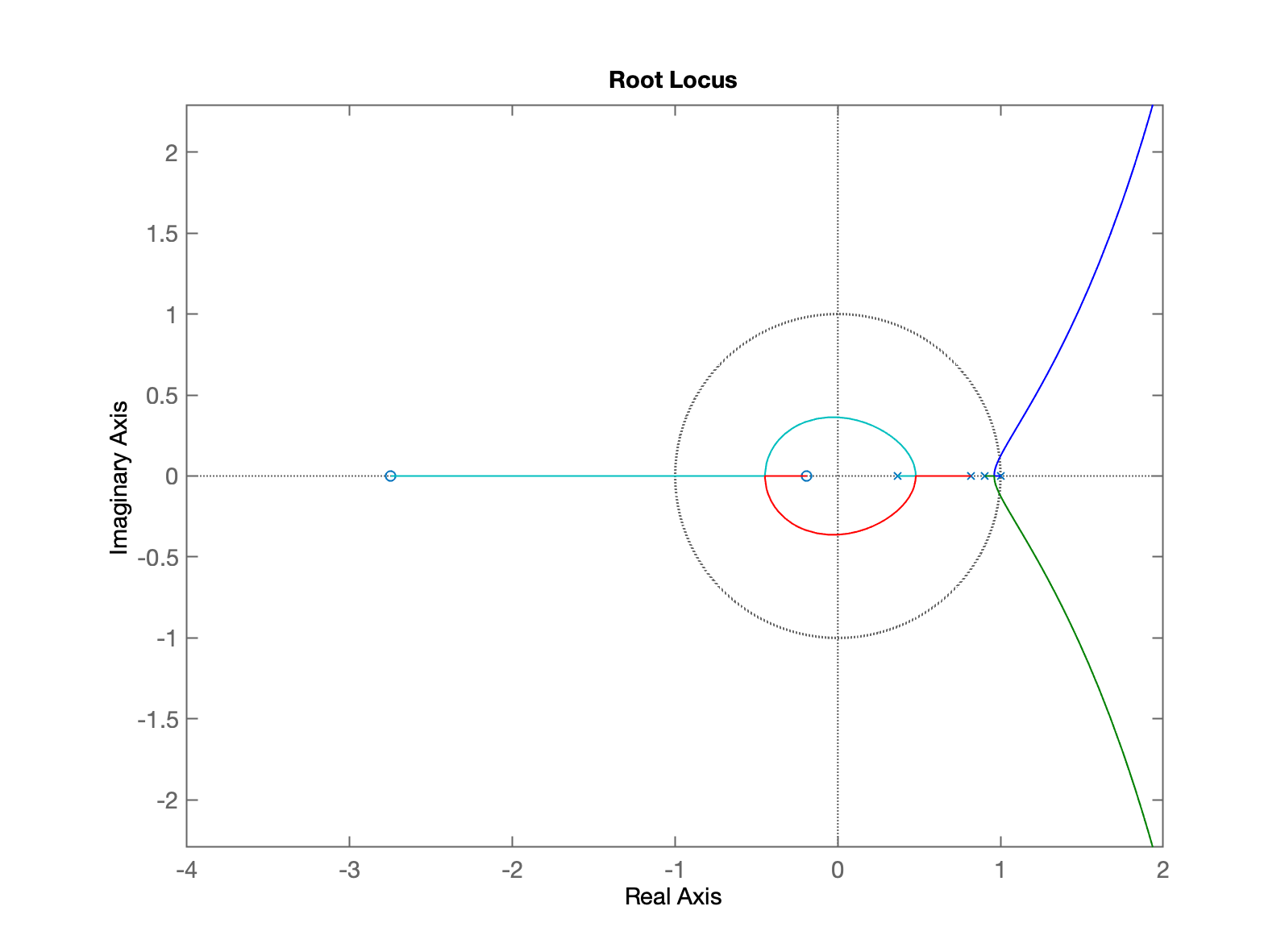
Sintonizando controlador, fazendo zoom na região de interesse...
xxxxxxxxxx>> axis([0.7 1.05 -0.05 0.2])>> hold on; zgrid(zeta,0)>> [K_I, polosMF] = rlocfind(ftma_I)Select a point in the graphics windowselected_point = 0.96717 + 0.042477iK_I = 0.71425polosMF = 0.96665 + 0.042613i 0.96665 - 0.042613i 0.78926 + 0i 0.36888 + 0i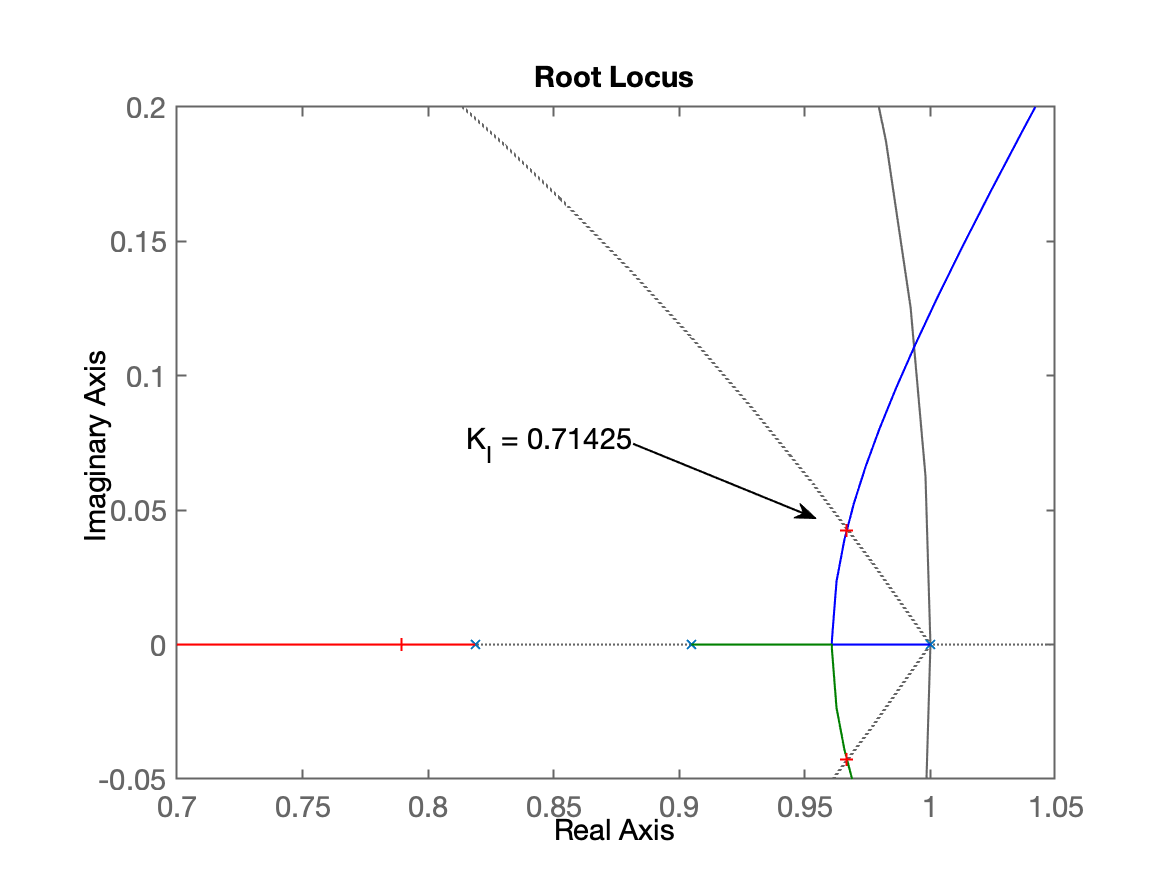
xxxxxxxxxx>> ftmf_I=feedback(K_I*ftma_I,1);>> figure; step(ftmf_I)>> stepinfo(ftmf_I) RiseTime: 3.5 SettlingTime: 11.5 SettlingMin: 0.90263 SettlingMax: 1.0923 Overshoot: 9.2258 Undershoot: 0 Peak: 1.0923 PeakTime: 7.8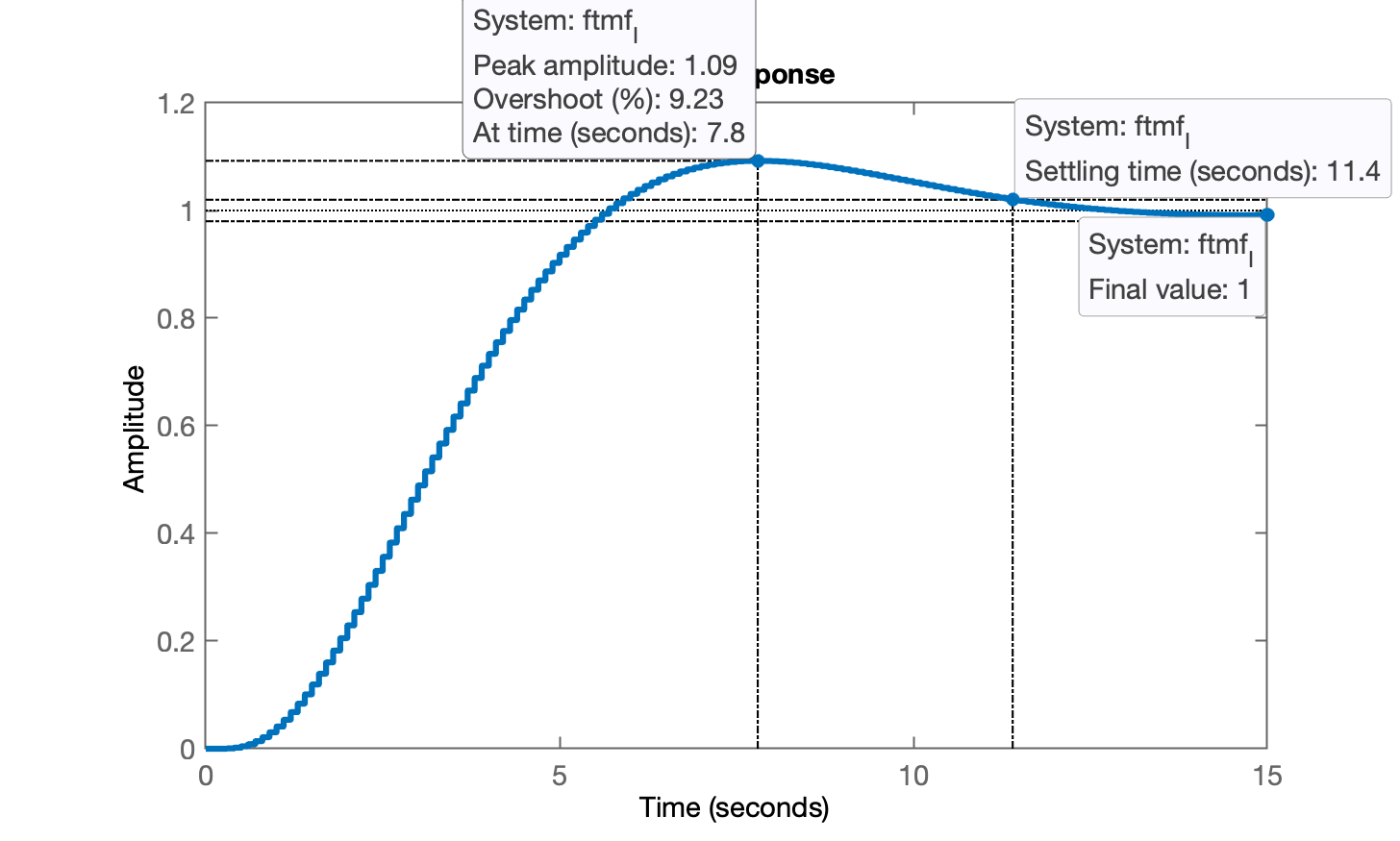
Comentário: o erro foi anulado (como esperado), mas... o aumentou consideravelmente.
Uma solução é acrescentar ação Proporcional.
3. Controlador PI
Equação do controlador PI:
ou simplesmente:
Temos uma incógnita à ser determinada: a posição do zero do controlador, .
Ver: https://fpassold.github.io/Controle_3/Controle3_2021_2/aula_1.html, parte do "Controlador PI (P + I)"...
xxxxxxxxxx>> % Lembrando dos pólos e zeros de MA de BOG(z)>> zpk(BoG) 0.00012224 (z+2.747) (z+0.1903) -------------------------------- (z-0.9048) (z-0.8187) (z-0.3679) Sample time: 0.1 secondsDiscrete-time zero/pole/gain model.Próxima aula: usaremos o Control System Designer para testar as opções "b" e "d" do PI que aparece em https://fpassold.github.io/Controle_3/Controle3_2021_2/aula_1.html.
Finalizando a seção de trabalho...
xxxxxxxxxx>> save planta>> diary off>> quitFernando Passold, em 27/03/2024.