Projeto Controladores
Continuação da aula de 17/04/2024:
Controlador DeadBeat #3
>> load planta>> zpk(C_dead2)ans = (z-0.9048) (z-0.8187) (z-0.3679) -------------------------------- z (z-1) (z+0.1903) Sample time: 0.1 secondsDiscrete-time zero/pole/gain model.>> Abrindo a planta e este controlador no App Control System Designer:
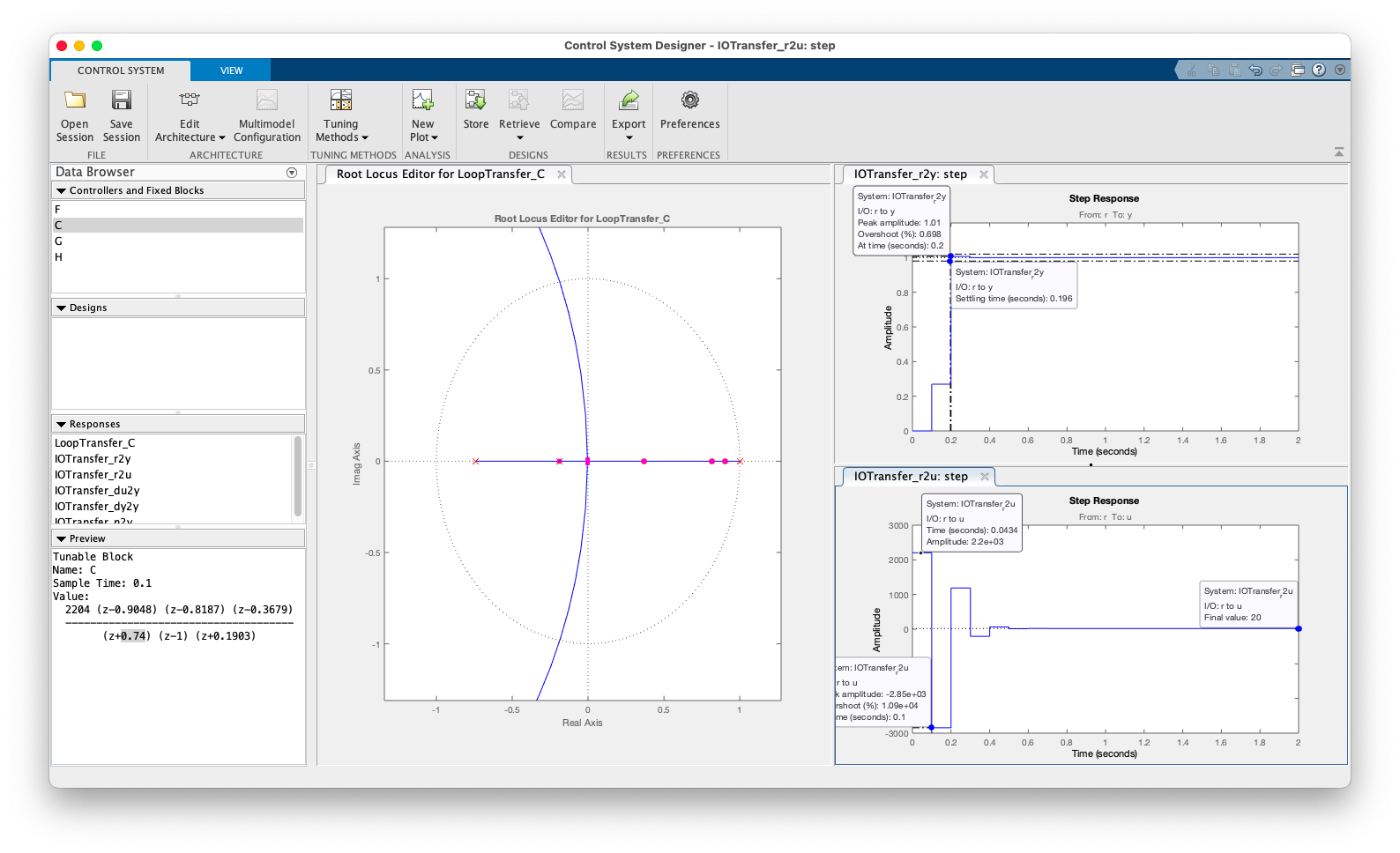
Chegamos à equação do controlador como sendo:
em comparação com o , deslocamos o pólo (do controlador) que antes estava em (na origem) e o "arrastamos" até a posição .
Projeto salvo como: ControlSystemDesigner-Dead3.mat.
Continuando com:
- Teoria de controlador PID Digital
Fernando Passold, em 24/04/2024