Projeto Controladores
Aula de 16/09/2024. Aula anterior: aula de 09/09/2024.
Recordando da aula passada → embasamento teórico:
- Projeto de PI usando contribuição angular (versão antiga, de 2019/2) e
- Projeto de PI (por contribuição angular) + Lag; (Aula de 30/10/2020].
Recomeçando da aula passada:
xxxxxxxxxx>> load planta % carregando dados da aula passada>> zpk(G) % recordando da planta 20 ------------------ (s+10) (s+4) (s+1) Continuous-time zero/pole/gain model.
Projeto de Controlador PI
Eq. genérica do PI:
Incognitas:
- Ganho do PI, (determinado via RL);
- zero do PI, -- à ser determinado usando alguma metodologia.
Raciocínio com opções para zero do PI:
Esperada foto capturada do quadro branco com 4 esboços de locais possíveis para o zero do PI.
Projeto do PI (Opção 1)
Opção 1: com .
Montando eq. do PI:
xxxxxxxxxx>> PI1=tf( [ 1 0.9] , [1 0])PI1 = s + 0.9 ------- s Continuous-time transfer function.>> ftma_PI1=PI1*G; % calculando eq. de malha-direta>> zpk(ftma_PI1) % verificando... 20 (s+0.9) -------------------- s (s+10) (s+4) (s+1) Continuous-time zero/pole/gain model.>> rlocus(ftma_PI1) % levantando RL para esta planta + controladorRealizando zoom na região de interesse, obtemos o seguinte RL:
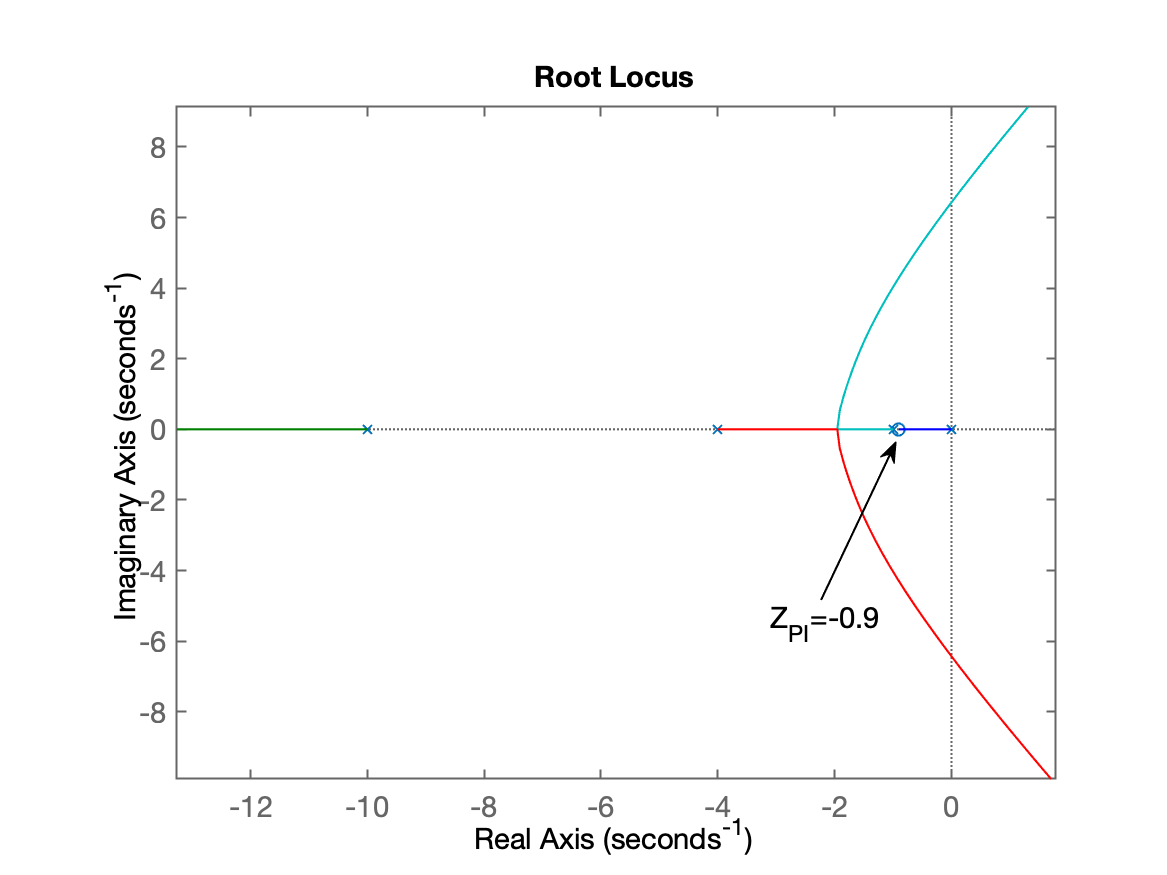
Sintonizando o controlador:
xxxxxxxxxx>> hold on;>> sgrid(zeta,0)>> [K_PI1,polosMF]=rlocfind(ftma_PI1)Select a point in the graphics windowselected_point = -1.5449 + 2.1478iK_PI1 = 3.7195polosMF = -10.98 + 0i -1.5844 + 2.1577i -1.5844 - 2.1577i -0.85085 + 0iFechando a malha:
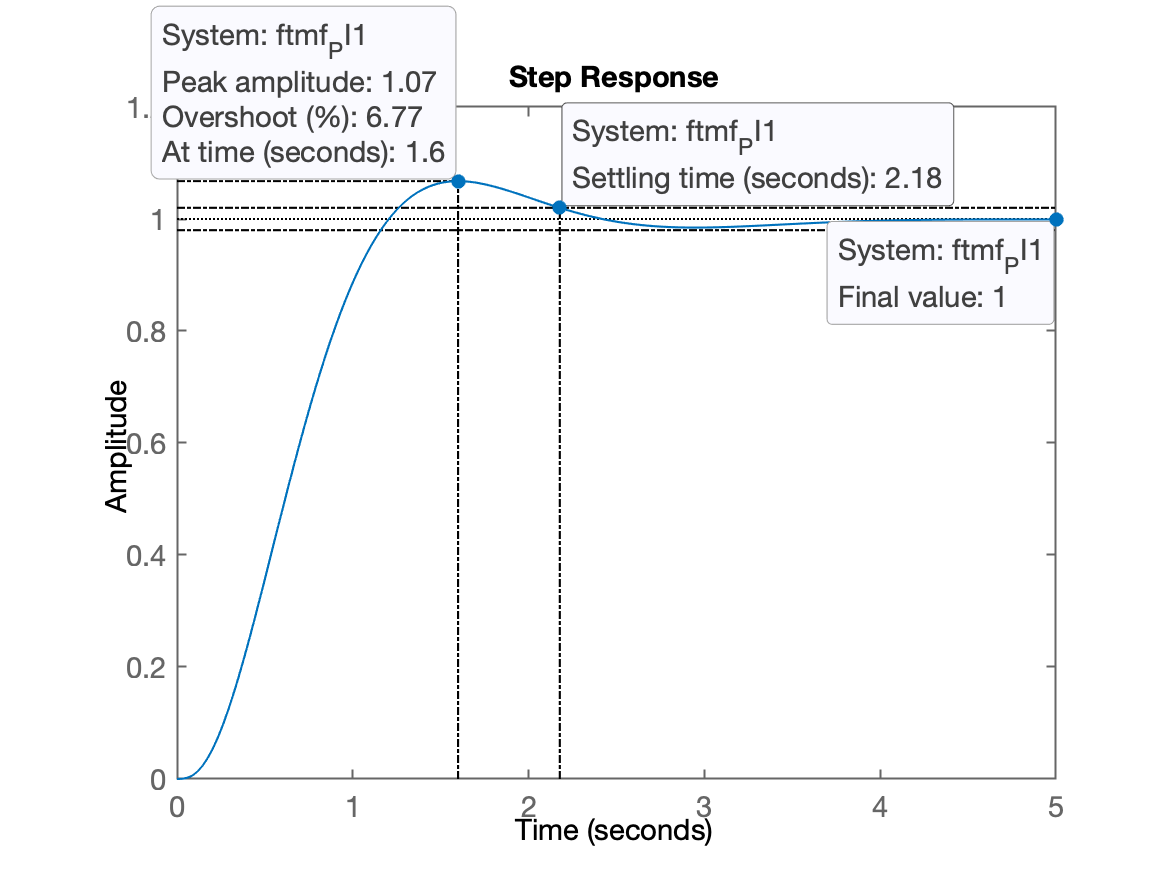
xxxxxxxxxx>> ftmf_PI1=feedback(K_PI1*ftma_PI1, 1);>> figure; step(ftmf_PI1)>> stepinfo(ftmf_PI1) RiseTime: 0.75423 SettlingTime: 2.1777 SettlingMin: 0.91804 SettlingMax: 1.0677 Overshoot: 6.7667 Undershoot: 0 Peak: 1.0677 PeakTime: 1.5986Resposta ao degrau unitário obtida para este PI:
Comparando resposta com Controlador Integrador Puro e Proporcional
xxxxxxxxxx>> figure; step(ftmf, ftmf_I2, ftmf_PI1)>> legend('K=4', 'Int. Puro', 'PI_1')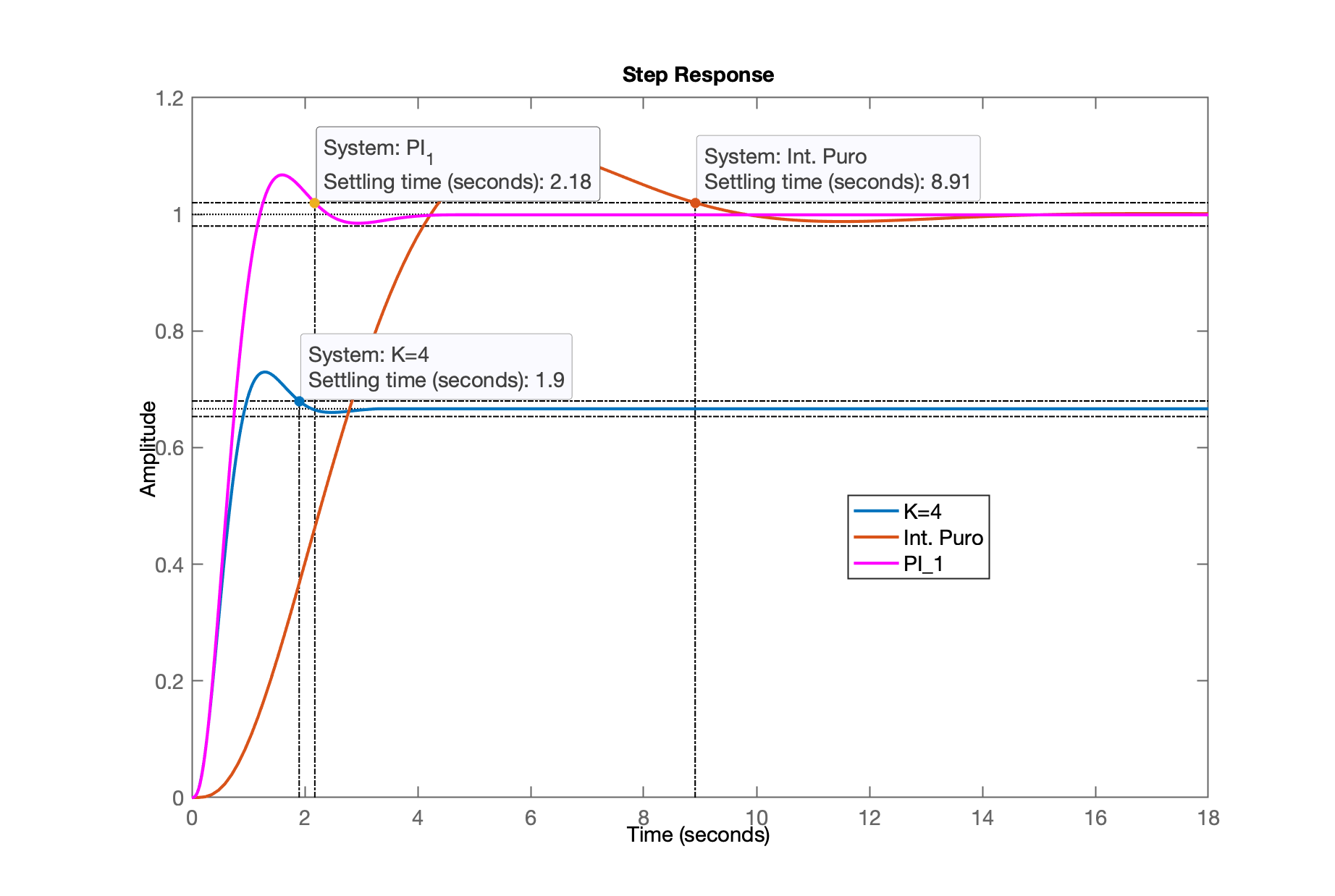
Realizando projeto de outros PI's. Outros PI's promissores:
- Opção 5) ; cancelando o pólo mais lento do sistema;
- Opção 3) .
Projeto do PI (Opção 5)
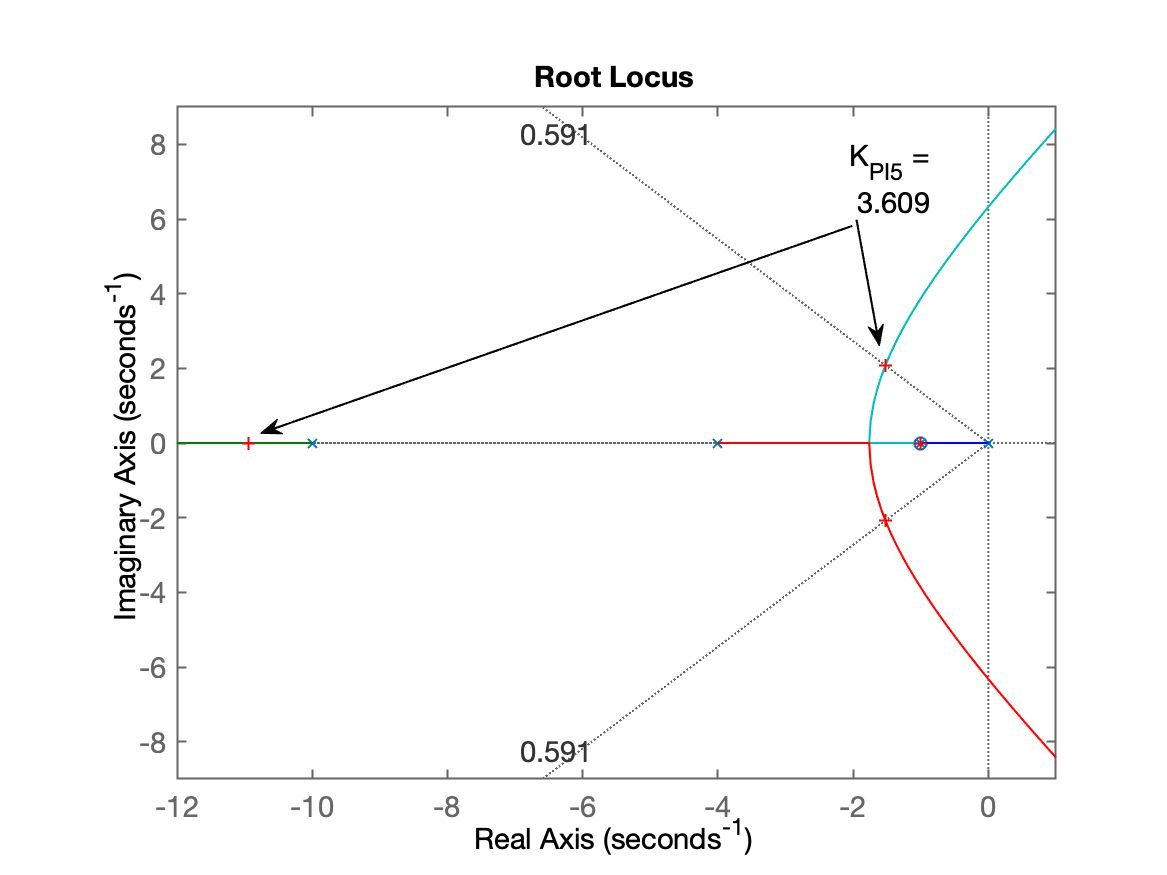
Opção 5) ; cancelando o pólo mais lento do sistema (propositalmente ⚠️).
xxxxxxxxxx>> PI5=tf( [ 1 1] , [1 0])PI5 = s + 1 ----- s Continuous-time transfer function.>> ftma_PI5=PI5*G;>> figure; rlocus(ftma_PI5)>> % segue zoom na região de interesse:>> axis([-12 1 -9 9])>> hold on;>> sgrid(zeta,0)>> [K_PI5,polosMF]=rlocfind(ftma_PI5)Select a point in the graphics windowselected_point = -1.5107 + 2.0619iK_PI5 = 3.609polosMF = -10.949 + 0i -1.5256 + 2.0652i -1.5256 - 2.0652i -1 + 0i>> zpk(ftma_PI5) % verificando pólos e zeros da FTNMA(s) neste caso 20 (s+1) -------------------- s (s+10) (s+4) (s+1) Continuous-time zero/pole/gain model.RL obtido:
Fechando a malha:
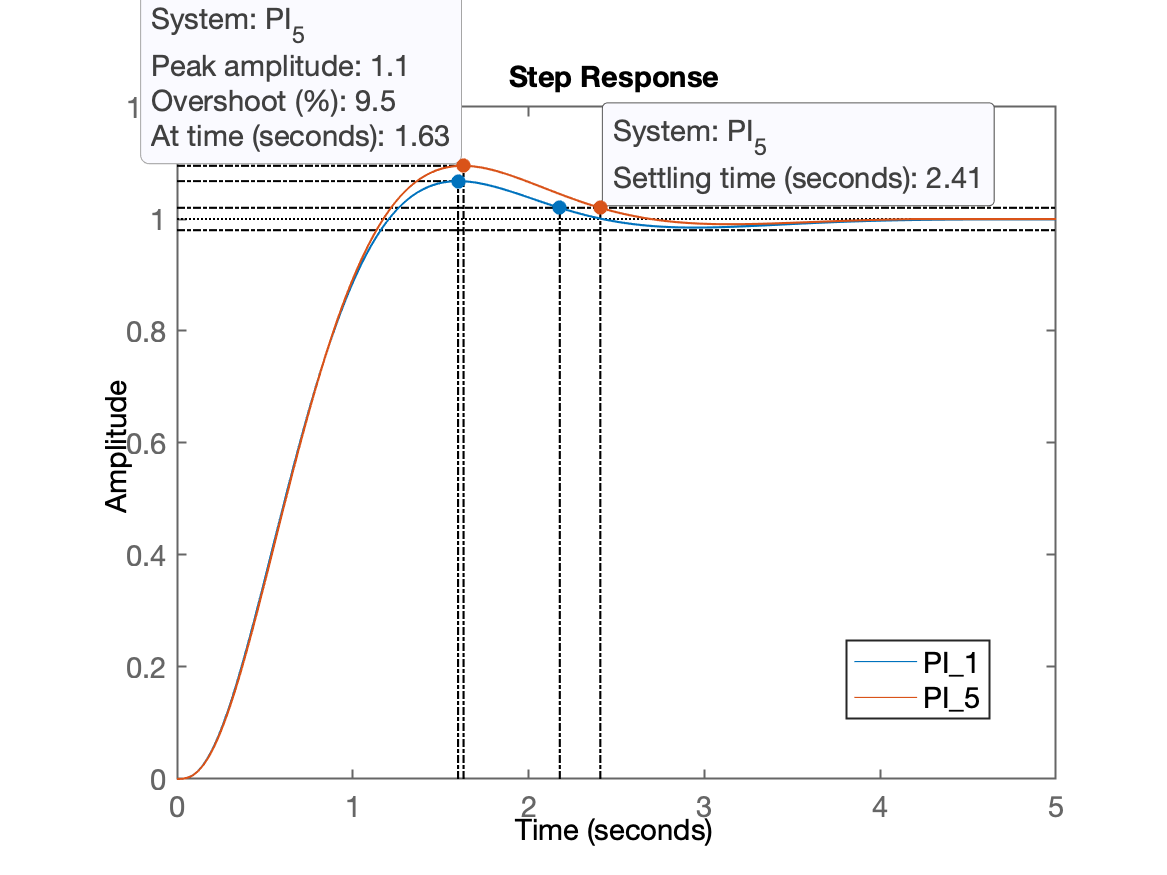
xxxxxxxxxx>> ftmf_PI5=feedback(K_PI5*ftma_PI5, 1); % fechando a malha>> figure; step(ftmf_PI1, ftmf_PI5) >> legend('PI_1', 'PI_5')Resposta ao degrau unitário, comparando com PI anterior (opções 1 e 5):
Projeto de PI (Opção 3)
Opção 3) .
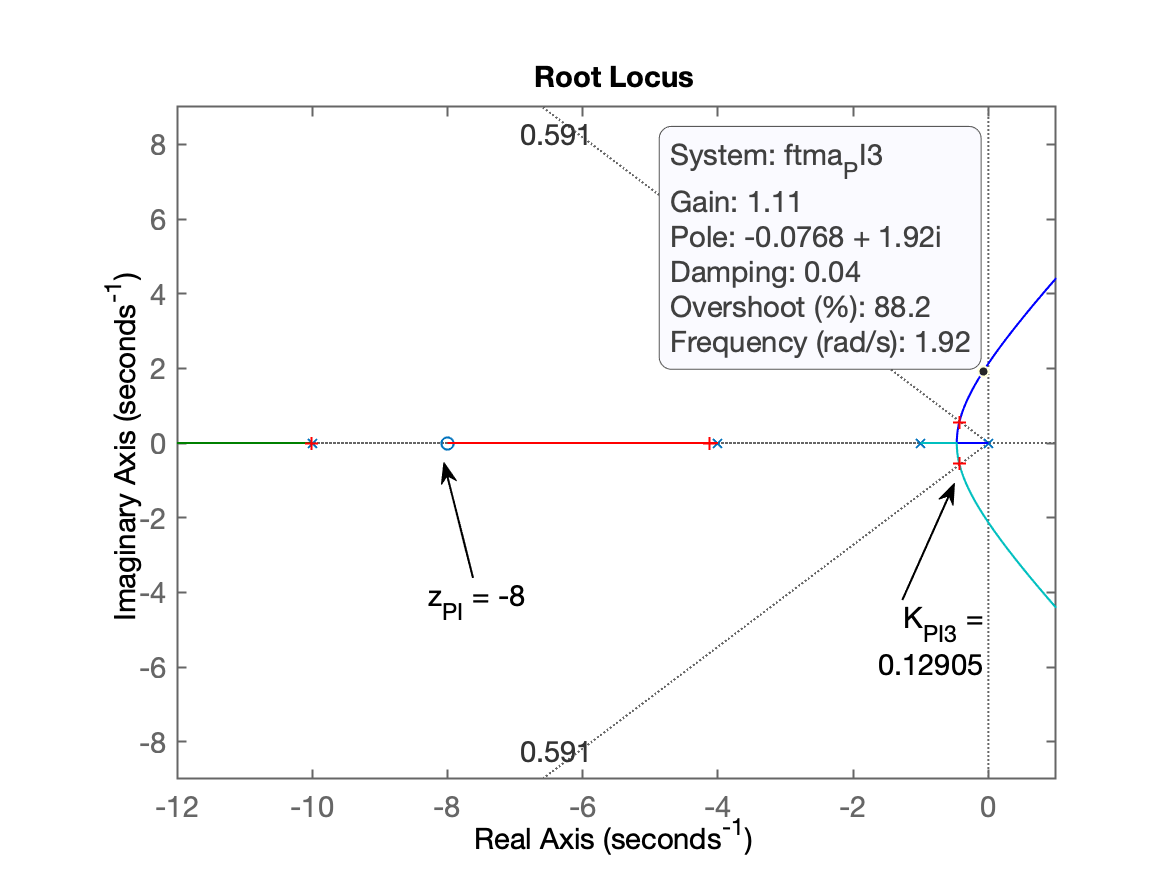
xxxxxxxxxx>> PI3=tf( [ 1 8] , [1 0])PI3 = s + 8 ----- s Continuous-time transfer function.>> ftma_PI3=PI3*G;>> figure; rlocus(ftma_PI3)>> % Zoom na região de interesse>> axis([-12 1 -9 9])>> hold on; sgrid(zeta,0)>> [K_PI3,polosMF]=rlocfind(ftma_PI3)Select a point in the graphics windowselected_point = -0.40166 + 0.55728iK_PI3 = 0.12905polosMF = -10.01 + 0i -4.1315 + 0i -0.42946 + 0.56111i -0.42946 - 0.56111iRL obtido mostrando ponto do RL com ponto de sintonização e outros detalhes:
Fechando a malha:
x
>> ftmf_PI3=feedback(K_PI3*ftma_PI3, 1);>> figure; step(ftmf_PI3, ftmf_PI1, ftmf_I2)>> legend('PI_3', 'PI_1', 'Int Puro')Resposta ao derau unitário comparando alguns controladores com ação integral: PI opção 1 e 3, e Integrador Puro:
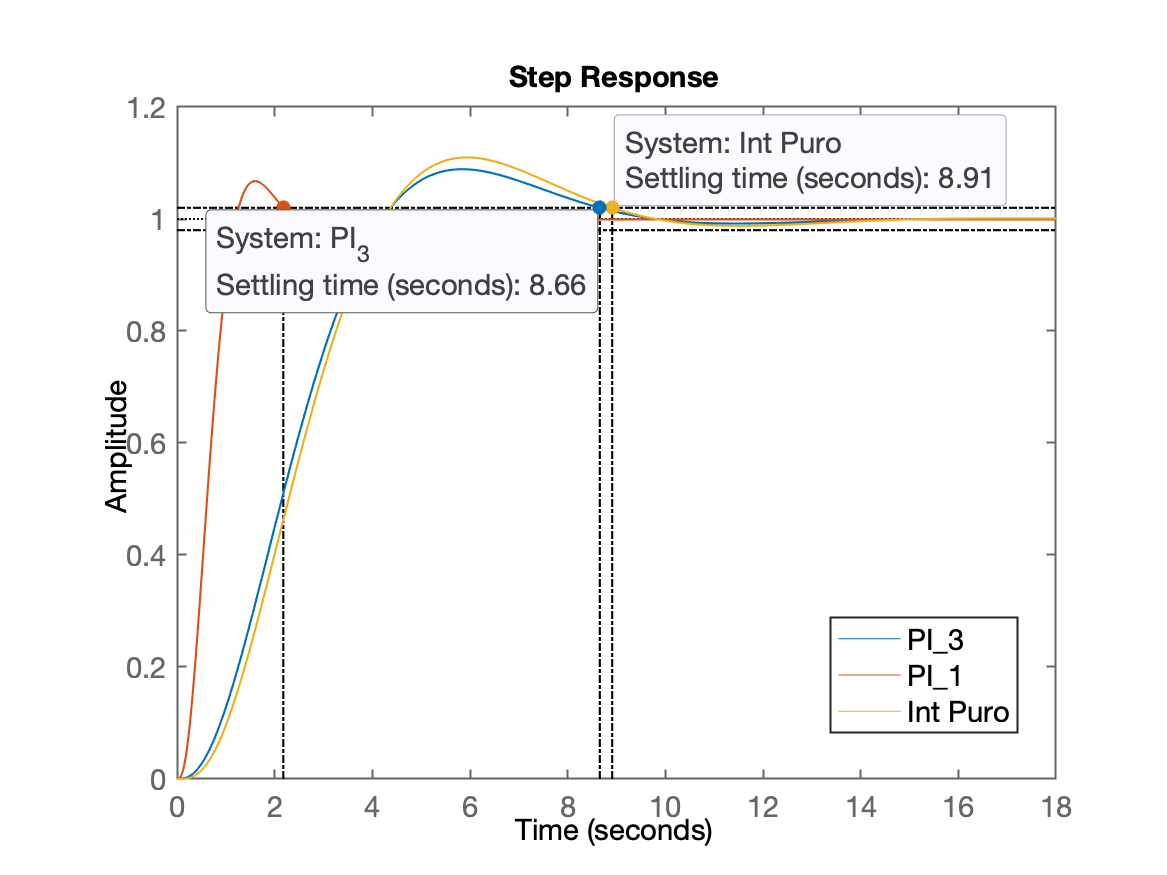
Alguns comentários: note que o zero deste controlador (PI) tão afastado do eixo , praticamente transforma este PI num Integrador Puro.
Projeto de "Lag"
Este é o Controlador por Atraso de Fase, "Lag", onde simplesmente o pólo sai da origem, deixando de ser um integrador, mas não se se afastando muito da origem. Quanto mais distante este pólo for localizado da origem maior será o erro em MF.
Lembrando da eq. do PI (opção 1):
Podemos implementar um lag semelhante à este PI, removendo o pólo da origem e colocando o mesmo em e então verificar o que acontece:
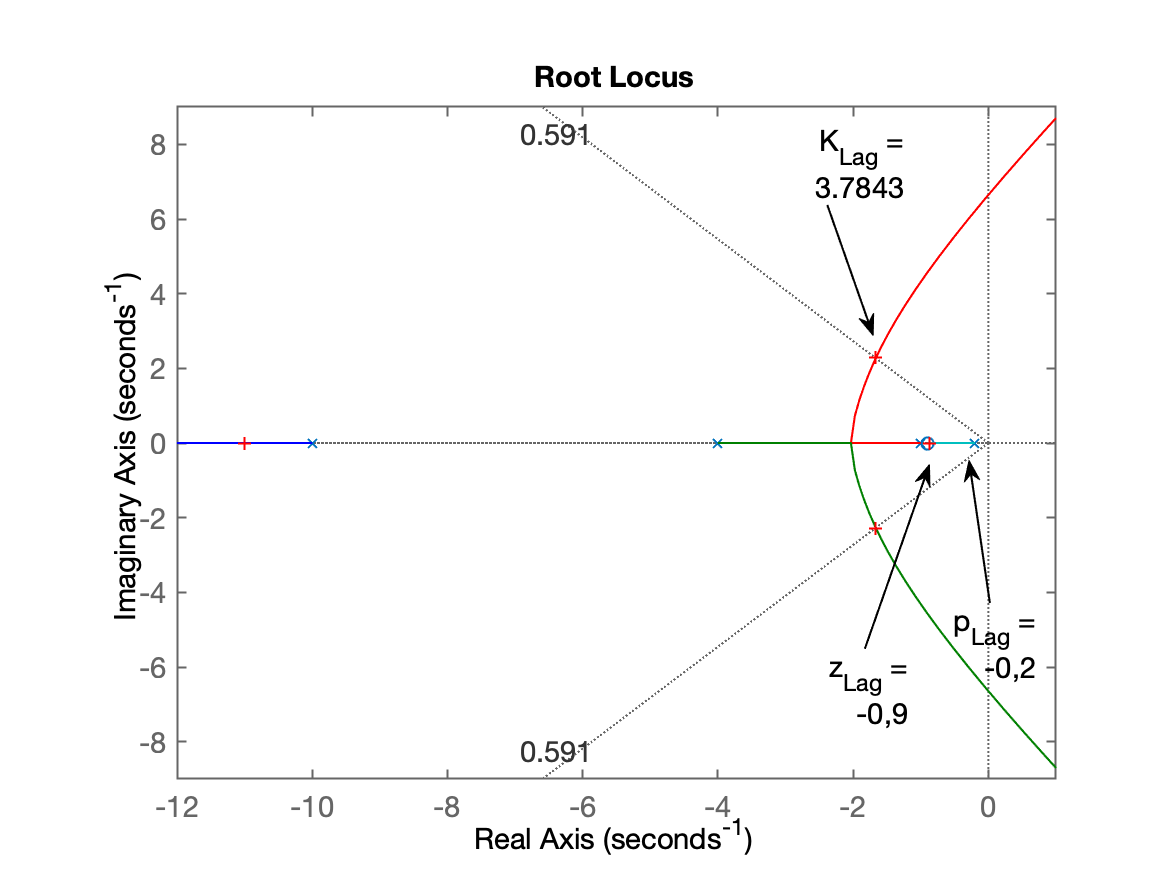
xxxxxxxxxx>> % PI1=tf( [ 1 0.9] , [1 0])>> Lag=tf( [1 0.9], [1 0.2])Lag = s + 0.9 ------- s + 0.2 Continuous-time transfer function.>> ftma_Lag=Lag*G;>> zpk(ftma_Lag) 20 (s+0.9) -------------------------- (s+10) (s+4) (s+1) (s+0.2) Continuous-time zero/pole/gain model.>> figure; rlocus(ftma_Lag)>> % realizando zoom na região de origem>> axis([-12 1 -9 9])>> hold on; sgrid(zeta,0)>> [K_Lag,polosMF]=rlocfind(ftma_Lag)Select a point in the graphics windowselected_point = -1.6647 + 2.2848iK_Lag = 3.7843polosMF = -11.009 + 0i -1.6623 + 2.2842i -1.6623 - 2.2842i -0.86631 + 0iSegue RL obtido mostrando ponto de sintonização deste controlador:
Fechando a malha:
xxxxxxxxxx>> ftmf_Lag=feedback(K_Lag*ftma_Lag, 1);>> figure; step(ftmf_Lag, ftmf_PI1)Resposta ao degrau unitário obtida para o Lag, comparado com PI1:
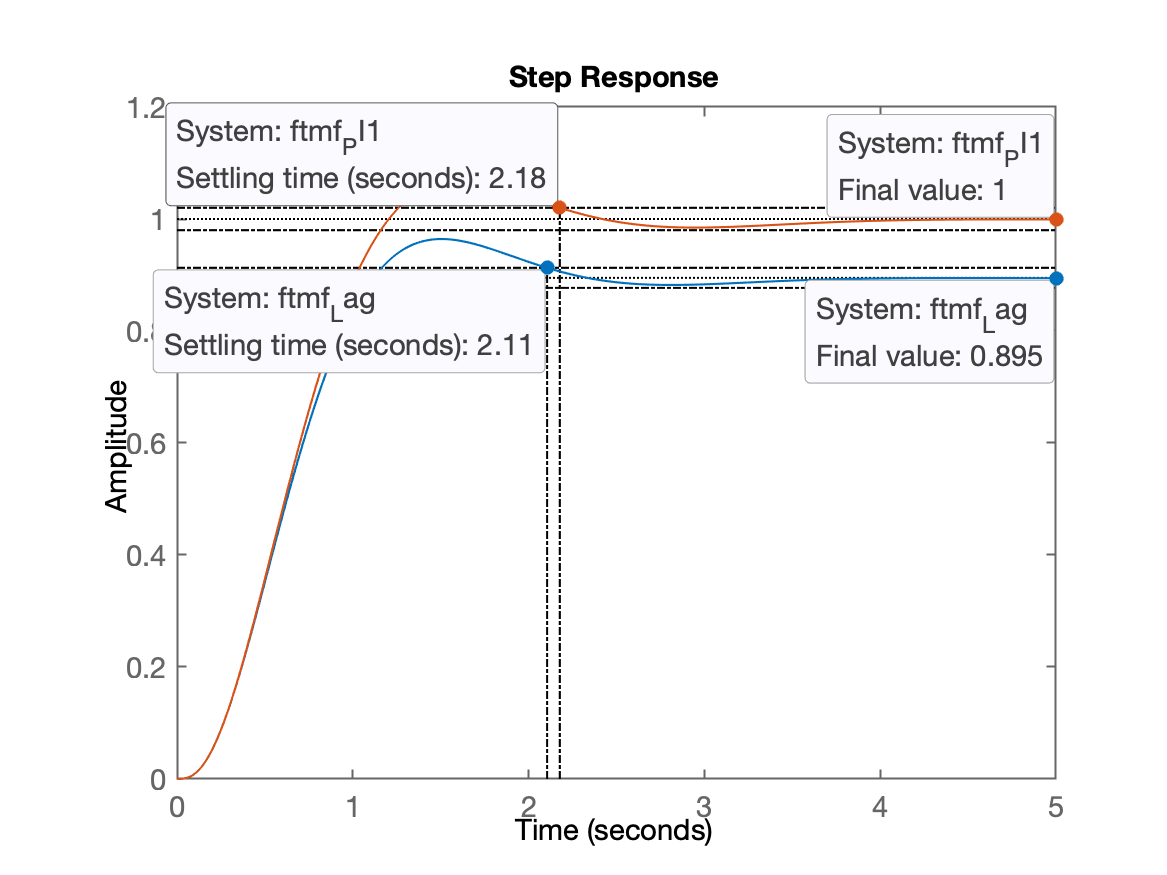
Note o erro ocasionado pelo Lag! Mas uma resposta ligeiramente mais rápida.
Calculando o erro em regime permanente:
xxxxxxxxxx>> dcgain(ftmf_Lag)ans = 0.8949>> erro_Lag= ((1-dcgain(ftmf_Lag))/1)*100erro_Lag = 10.51Fim, terminando esta seção de trabalho no Matlab, não esquecer de:
xxxxxxxxxx>> save planta>> diary off % se você inicio os trabalhos com algo como diary aula16092024.txt>> quitFernando Passold, em 16/09/2024.