Uso do Octave
- Uso do Octave
Instalação do Octave
O Octave pode ser obtido à partir de: https://octave.org/download.html.
No Windows, o arquivo de instalação ocupa 364 MB na versão 7.2.0. Porém, depois de instalado (descompactado), e acrescentado os pacotes que necessitaremos para trabalhar na área de controle, o Octave passa a ocupar aproximadamente 2,17 GBytes.
No Linux/Ubuntu, a versão snap do Octave 7.2.0 uma vez instalado (sem nenhum pacote extra) ocupa aproximadamente 345 Mbytes. Mas, diferente da versão para Windows, no Linux/Ubuntu, cada pacote (comandos/funções) extras deve se instalado à mão conforme se mostra à seguir e então, o espaço ocupado em disco aumenta.
Segue um janela de comandos comum do Octave:
Primeiro Teste
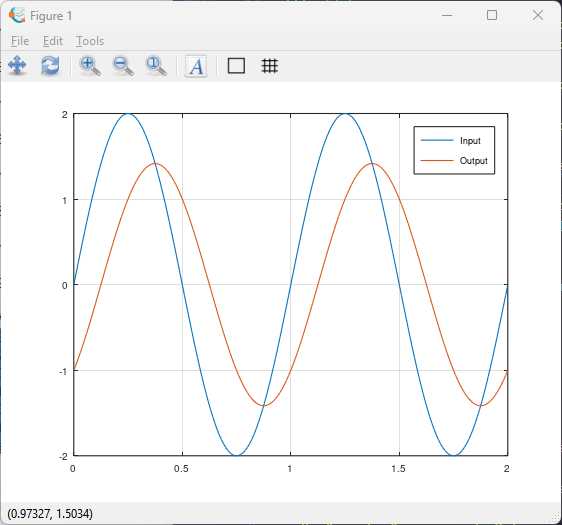
Vamos tentar imprimir um simples gráfico:
>> t=0:0.01:2; % cria vetor tempo
>> pi % constante pi
ans = 3.1416
>> y=2*sin(2*pi*1*t); % cria onda senoidal 1 Hz
>> % suponha um FPB com fc = 1 Hz, queda de 3 dB em 1 Hz:
>> G=10^(-3/20) % calculando "ganho" do FPB
G = 0.7079
>> y2=G*2*sin(2*pi*1*t-pi/4); % senóide de saída, defasagem de 45 graus
>> plot(t,y, t,y2) % plotando 2 curvas
>> legend('Input', 'Output') % legenda
Se não houve erros de digitação, uma janela gráfica como a mostrada abaixo deve ter sido gerada:
Instalando pacotes (comandos extras)
De forma a ampliar as possibilidades de uso do Octave com a área de Controle Automático, se sugere a instalação de algumas ferramentas extras, chamadas de "pacotes".
Os "pacotes" no caso do Octave, são equivalentes aos "toolboxes" no caso do Matlab.
Para listar pacotes já instalados
Para listar pacotes já instalados no Octave, fazer:
>> pkg list
Package Name | Version | Installation directory
---------------------+---------+-----------------------
audio | 2.0.5 | C:\Program Files\GNU Octave\Octave-7.2.0\mingw64\share\octave\packages\audio-2.0.5
biosig | 2.4.2 | C:\Program Files\GNU Octave\Octave-7.2.0\mingw64\share\octave\packages\biosig-2.4.2
communications | 1.2.4 | C:\Program Files\GNU Octave\Octave-7.2.0\mingw64\share\octave\packages\communications-1.2.4
control | 3.4.0 | C:\Users\fpassold\AppData\Roaming\octave\api-v57\packages\control-3.4.0
data-smoothing | 1.3.0 | C:\Program Files\GNU Octave\Octave-7.2.0\mingw64\share\octave\packages\data-smoothing-1.3.0
database | 2.4.4 | C:\Program Files\GNU Octave\Octave-7.2.0\mingw64\share\octave\packages\database-2.4.4
...
Repare que eventualmente alguns pacote já estão instalados (caso do Windows). Entre eles o "control" A lista acima é maior, mas apenas uma parte foi mostrada.
Pacotes Interessantes para nosso caso de uso
No nosso caso estamos interessados nos pacotes:
- control
- data-smoothing
- fits
- generate_html
- geometry
- miscellaneous
- symbolic
- signal
Para instalar pacotes
Para descobrir que pacotes estão disponíveis (e versão dos mesmos):
>> pkg list -forge
Octave Forge provides these packages:
arduino 0.10.0
audio 2.0.5
bim 1.1.5
bsltl 1.3.1
cgi 0.1.2
communications 1.2.4
control 3.4.0
data-smoothing 1.3.0
database 2.4.4
dataframe 1.2.0
dicom 0.5.1
divand 1.1.2
doctest 0.7.0
econometrics 1.1.2
fem-fenics 0.0.5
financial 0.5.3
fits 1.0.7
fpl 1.3.5
fuzzy-logic-toolkit 0.4.6
ga 0.10.3
general 2.1.2
generate_html 0.3.3
geometry 4.0.0
gsl 2.1.1
image 2.14.0
image-acquisition 0.2.2
instrument-control 0.8.0
interval 3.2.1
io 2.6.4
level-set 0.3.0
linear-algebra 2.2.3
lssa 0.1.4
ltfat 2.3.1
mapping 1.4.2
matgeom 1.2.3
miscellaneous 1.3.0
msh 1.0.10
mvn 1.1.0
nan 3.7.0
ncarray 1.0.5
netcdf 1.0.16
nurbs 1.4.3
ocl 1.2.0
ocs 0.1.5
octclip 2.0.1
octproj 2.0.1
optics 0.1.4
optim 1.6.2
optiminterp 0.3.7
parallel 4.0.1
quaternion 2.4.0
queueing 1.2.7
secs1d 0.0.9
secs2d unknown
secs3d 0.0.1
signal 1.4.3
sockets 1.4.0
sparsersb 1.0.9
splines 1.3.4
statistics 1.4.3
stk 2.7.0
strings 1.3.0
struct 1.0.18
symbolic 3.0.1
tisean 0.2.3
tsa 4.6.3
vibes 0.2.0
video 2.0.2
vrml 1.0.13
windows 1.6.3
zeromq 1.5.5
>>
Obs.: a listagem acima é resultado do Octave sendo executado no Windows.
Se for necessário instalar pacotes (caso do Linux), use o comando:
>> pkg install -forge <package_name>
A opção -forge carrega diretamente do repositório internet da Octave (obviamente exige conexão à internet).
Por exemplo:
>> pkg install -forge symbolic
For information about changes from previous versions of the symbolic package, run 'news symbolic'.
>>
Se você deseja instalar pacotes e acompanhar o processo de download e instalação, use a opção -verbose, mas isto pode gerar longas mensagens:
Por exemplo:
>> pkg install -forge -verbose control
mkdir (/tmp/oct-T38v9D)
untar (/tmp/control-3.4.0-RNDqAP.tar.gz, /tmp/oct-T38v9D)
checking for mkoctfile... /app/bin/mkoctfile-7.2.0 --verbose
checking for octave-config... /app/bin/octave-config-7.2.0
checking whether the C++ compiler works... yes
checking for C++ compiler default output file name... a.out
checking for suffix of executables...
checking whether we are cross compiling... no
checking for suffix of object files... o
checking whether we are using the GNU C++ compiler... yes
checking whether g++ accepts -g... yes
checking is_real_type or isreal... isreal
checking is_cell or iscell... iscell
checking is_object or isobject... isobject
checking is_complex_type or iscomplex... iscomplex
checking is_numeric_type or isnumeric... isnumeric
checking for g77... no
checking for xlf... no
checking for f77... no
checking for frt... no
checking for pgf77... no
checking for cf77... no
checking for fort77... no
checking for pghpf... no
checking for epcf90... no
checking for gfortran... gfortran
checking whether we are using the GNU Fortran 77 compiler... yes
checking whether gfortran accepts -g... yes
checking for library containing dgges... no
configure: creating ./config.status
config.status: creating Makefile.conf
config.status: creating config.h
make: Entrando no diretório '/tmp/oct-T38v9D/control-3.4.0/src'
tar -xzf slicot.tar.gz
/app/bin/mkoctfile-7.2.0 --verbose -Wall -Wno-deprecated-declarations __control_helper_functions__.cc
g++ -c -I/app/include -fPIC -I/app/include/octave-7.2.0/octave/.. -I/app/include/octave-7.2.0/octave -I/app/include -pthread -fopenmp -O2 -g -pipe -Wp,-D_FORTIFY_SOURCE=2 -fexceptions -fstack-protector-strong -grecord-gcc-switches -Wall -Wno-deprecated-declarations __control_helper_functions__.cc -o /tmp/oct-PTj2gZ.o
mkdir sltmp
mv slicot/src/*.f ./sltmp
mv slicot/src_aux/*.f ./sltmp
if [ "0" = "1" ]; then \
echo "copy routines using DGGES"; \
cp SB04OD.fortran ./sltmp/SB04OD.f; \
cp SG03AD.fortran ./sltmp/SG03AD.f; \
cp SG03BD.fortran ./sltmp/SG03BD.f; \
fi;
cp AB08NX.fortran ./sltmp/AB08NX.f
cp AG08BY.fortran ./sltmp/AG08BY.f
cp SB01BY.fortran ./sltmp/SB01BY.f
cp SB01FY.fortran ./sltmp/SB01FY.f
gfortran -c -fPIC -g -O2 -std=legacy UD01MZ.f -o UD01MZ.o
gfortran -c -fPIC -g -O2 -std=legacy UD01ND.f -o UD01ND.o
gfortran -c -fPIC -g -O2 -std=legacy UE01MD.f -o UE01MD.o
ar -rc slicotlibrary.a ./sltmp/*.o
rm -rf sltmp slicot
LDFLAGS="-L/app/lib -lopenblas -L/app/lib -L/usr/lib/gcc/x86_64-unknown-linux-gnu/11.3.0 -L/usr/lib/gcc/x86_64-unknown-linux-gnu/11.3.0/../../../x86_64-linux-gnu -L/usr/lib/gcc/x86_64-unknown-linux-gnu/11.3.0/../../../../lib64 -L/lib/x86_64-linux-gnu -L/lib/../lib64 -L/usr/lib/x86_64-linux-gnu -L/usr/lib/../lib64 -L/usr/lib/gcc/x86_64-unknown-linux-gnu/11.3.0/../../../../x86_64-unknown-linux-gnu/lib -L/usr/lib/gcc/x86_64-unknown-linux-gnu/11.3.0/../../.. -lgfortran -lm -lquadmath" \
/app/bin/mkoctfile-7.2.0 --verbose -Wall -Wno-deprecated-declarations __control_slicot_functions__.cc common.cc slicotlibrary.a
g++ -c -I/app/include -fPIC -I/app/include/octave-7.2.0/octave/.. -I/app/include/octave-7.2.0/octave -I/app/include -pthread -fopenmp -O2 -g -pipe -Wp,-D_FORTIFY_SOURCE=2 -fexceptions -fstack-protector-strong -grecord-gcc-switches -Wall -Wno-deprecated-declarations __control_slicot_functions__.cc -o /tmp/oct-2fVEiL.o
g++ -c -I/app/include -fPIC -I/app/include/octave-7.2.0/octave/.. -I/app/include/octave-7.2.0/octave -I/app/include -pthread -fopenmp -O2 -g -pipe -Wp,-D_FORTIFY_SOURCE=2 -fexceptions -fstack-protector-strong -grecord-gcc-switches -Wall -Wno-deprecated-declarations common.cc -o /tmp/oct-x9Eujr.o
g++ -I/app/include/octave-7.2.0/octave/.. -I/app/include/octave-7.2.0/octave -I/app/include -pthread -fopenmp -O2 -g -pipe -Wp,-D_FORTIFY_SOURCE=2 -fexceptions -fstack-protector-strong -grecord-gcc-switches -Wall -Wno-deprecated-declarations -o __control_slicot_functions__.oct /tmp/oct-2fVEiL.o /tmp/oct-x9Eujr.o slicotlibrary.a -shared -Wl,-Bsymbolic -L/app/lib -lopenblas -L/app/lib -L/usr/lib/gcc/x86_64-unknown-linux-gnu/11.3.0 -L/usr/lib/gcc/x86_64-unknown-linux-gnu/11.3.0/../../../x86_64-linux-gnu -L/usr/lib/gcc/x86_64-unknown-linux-gnu/11.3.0/../../../../lib64 -L/lib/x86_64-linux-gnu -L/lib/../lib64 -L/usr/lib/x86_64-linux-gnu -L/usr/lib/../lib64 -L/usr/lib/gcc/x86_64-unknown-linux-gnu/11.3.0/../../../../x86_64-unknown-linux-gnu/lib -L/usr/lib/gcc/x86_64-unknown-linux-gnu/11.3.0/../../.. -lgfortran -lm -lquadmath -L/app/lib -shared -Wl,-Bsymbolic -L/app/lib -Wl,-z,relro,-z,now -Wl,--as-needed
make: Saindo do diretório '/tmp/oct-T38v9D/control-3.4.0/src'
copyfile /tmp/oct-T38v9D/control-3.4.0/src/__control_helper_functions__.oct /tmp/oct-T38v9D/control-3.4.0/src/__control_slicot_functions__.oct /tmp/oct-T38v9D/control-3.4.0/inst/x86_64-pc-linux-gnu-api-v57
For information about changes from previous versions of the control package, run 'newscontrol'.
>>
Pacotes mínimos para área de Controle
Os pacotes mínimos necessários para a área de Controle Automático Clássico aparecem listados abaixo:
>> ver
----------------------------------------------------------------------
GNU Octave Version: 7.2.0 (hg id: 6c1e310b2230)
GNU Octave License: GNU General Public License
Operating System: Linux 5.15.0-56-generic #62-Ubuntu SMP Tue Nov 22 19:54:14 UTC 2022 x86_64
----------------------------------------------------------------------
Package Name | Version | Installation directory
--------------+---------+-----------------------
control *| 3.4.0 | .../.var/app/org.octave.Octave/data/octave/api-v57/packages/control-3.4.0
signal *| 1.4.3 | .../.var/app/org.octave.Octave/data/octave/api-v57/packages/signal-1.4.3
symbolic *| 3.0.1 | .../.var/app/org.octave.Octave/data/octave/api-v57/packages/symbolic-3.0.1
>>
Novidades no pacote Control
>> news control
Alguns destaques:
- Declare
tf([1],[1])as static gain - Returned num and den of
tfdatehave same length (bug #43947) - Fixes for Octave 7.1.0: removed deprecated
.+operator and unsupportedplotstyle - Fixed time response for first order systems
- new function
rlocusxproviding gain, damping and frequency for selected poles together with the possibility to generate open loop bode plots and simulations of the closed loop for selected closed loop poles. - Fixed several issues in
bode,c2d,lsimandstep(control-3.3.0, Release Date: 2021-06-19). - Fixed issues in legends of time and frequency responses when requested for multiple systems.
- Added discretization method
fohtoc2d. - Fixed transposing a tfploy.
- new function
sgrid(control-3.2.0, Release Date: 2019-04-01) - new function:
ss2ss. - added demos to
rlocus,pzmap,bode,nichols,nyquist,impulse,lsim,rampandstep. - improved
pzmapto plot with only zeros. - New function:
damp(control-3.1.0, Release Date: 2018-03-11). - The new function
imp_invar.mconverts a Laplace tranfer function to a discrete tranfer function. - Function
lsimnow plots inputs as well.
Atualizando pacotes já instalados
De vez em quando pode ser interessante atualizar os pacotes já instalados. Para tanto, simplesmente execute:
>> pkg update
>> pkg update
For information about changes from previous versions of the netcdf package, run 'news netcdf'.
For information about changes from previous versions of the symbolic package, run 'news symbolic'.
For information about changes from previous versions of the windows package, run 'news windows'.
>>
Obs.: usar a opção "global" apenas se deseja aplicar alterações à todos os usuários e se tiver permissão (estiver executando o Octave como) de administrador para acessar/alterar arquivos de instalação, senão ocorrerão erros!
Executando o pacote "control"
Informações adicionais sobre este pacote podem ser encontradas em:
Segue lista das funções mais utilizadas:
Obs.: ANTES de chamar qualquer função associado a este pacote, você deve "carregar" este pacote executando comandos como:
>> pkg load control
>> pkg load symbolic
>>
Segue exemplo de ingresso de uma "transfer function" (função transferência):
objeto tf, exemplo de uso:
>> s = tf('s');
>> G = 1/(s+1)
>> z = tf('z', tsam);
>> z = tf('z', 0.2);
>> Gd = 0.095/(z-0.9)
>> sys = tf (num,den);
>> G = tf([1, 5, 7], [1, 8, 6])
>> sys = tf (num,den,tsam);
Exemplo
>> num=poly([0, -2])
num =
1 2 0
>> den=poly([-1, -4, -8]);
>> G=tf(num,den)
Transfer function 'G' from input 'u1' to output ...
s^2 + 2 s
y1: ------------------------
s^3 + 13 s^2 + 44 s + 32
Continuous-time model.
>> zpk(G)
Transfer function 'ans' from input 'u1' to output ...
s^2 + 2 s
y1: ------------------------
s^3 + 13 s^2 + 44 s + 32
Continuous-time model.
>> % conferindo detalhes da função transferência:
>> pole(G)
ans =
-8
-4
-1
>> zero(G)
ans =
-2
0
>> % de outra forma:
>> [z,p,k]=tf2zp(G)
z = [](0x1)
p =
-10
-4
-1
k = 40
>>
Note: a função
tf2zp()(disponível no pacotesignal) permite obter um resultado simular ao que seria obtido usando a funçãozpk()do MATLAB
Exemplo de Uso: Projeto de um Controlador Proporcional
Seja uma planta como:
O projeto de um controlador Proporcional com sobressinal máximo de 10% poderia ser desenvolvido como:
>> % Nâo esquecer de carregar certos pacotes:
>> pkg load control
>> pkg load symbolic
>>
>> G=tf(40,poly([-1 -4 -10])) % ingressando a planta
Transfer function 'G' from input 'u1' to output ...
40
y1: ------------------------
s^3 + 15 s^2 + 54 s + 40
Continuous-time model.
>> pole(G) % confirmando polos da planta
ans =
-10
-4
-1
>> zero(G) % confirmando zeros da planta
ans = [](0x1)
>> dcgain(G) % confirmando ganho DC da planta
ans = 1
>> % Isto significa que um degrau de amplitude u(t)=1 na entrada da planta
>> % faz saída convergir para y(∞)=1
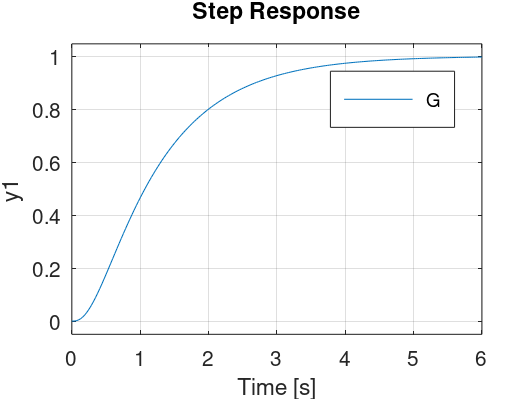
>> % confirmando aplicando degrau unitário na planta:
>> step(G)
O que deve ter gerado o seguinte gráfico:
Temos que fechar a malha definindo um ganho para o controlador, evitando o sobressinal máximo desejado, então:
>> OS=10; % valor do sobressinal em porcentagem
>> zeta=(-log(OS/100))/(sqrt(pi^2+(log(OS/100)^2)))
zeta = 0.5912
>> rlocus(G)
>> hold on;
>> sgrid(zeta,0)
error: sgrid: W argument (1) must have positive values larger than 0
error: called from
sgrid at line 147 column 7
>> % sgrid obriga 2 parâmetros de entrada no mínimo
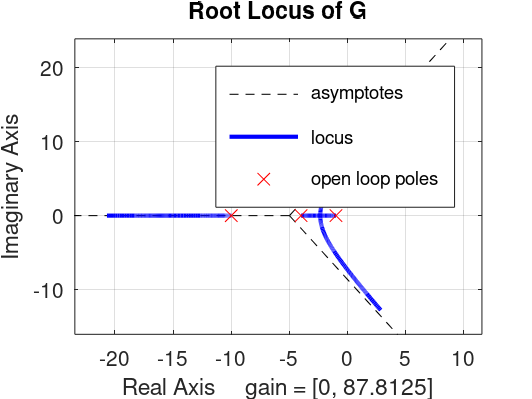
Mas podemos traçar uma reta axial que parte da origem do plano-s. Conhecendo-se o valor do
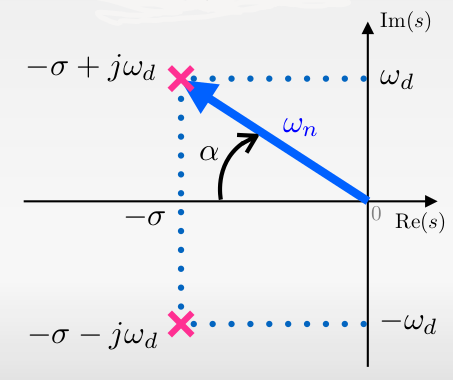
A figura anterior mostra polos de um sistema de 2a-ordem, do tipo:
com polos em:
então:
>> alpha=acos(zeta)
alpha = 0.9383
>> % convertendo para graus:
>> alpha_deg=alpha*180/pi
alpha_deg = 53.761
Podemos "automatizar" este cálculo e incluir os comandos para imprimir a reta correspondente a valores constantes de sgrid2(), cujo código aparece em seguinda:
function sgrid2 (zeta)
% função para plotar linha guia do zeta na última janela gráfica ativa
% a partir do valor de zetam calcula o angulo alpha e traça a reta
% que corresponde a linha guia
% Fernando Passold, em 29/12/2022
alpha=acos(zeta); % angulo correspondente ao zeta
% fig=gcf(); % descobre numero da última janela ativa atual - dá no mesmo que fazer:
fig = get (0, "currentfigure"); % recupera número da última figura ativa
% Capturando limite da figura atual
xlim=get(gca(),"xlim");
ylim=get(gca(),"ylim");
min_x=min(xlim);
x=[0 min_x]; % vetor pontos da reta
y2=abs(min_x)*tan(alpha);
y=[0 y2];
hold on;
plot(x,y,"color","cyan"); % ,"linestyle","--");
% sobre propriedades de plot ver:
% https://docs.octave.org/v6.3.0/Line-Properties.html
y=[0 -y2];
plot(x,y,"color","cyan");
shg % show the graph window
% Note: shg is equivalent to figure (gcf) assuming that a current figure exists.
end
O resultado da aplicação da mesma na figura anterior gera:
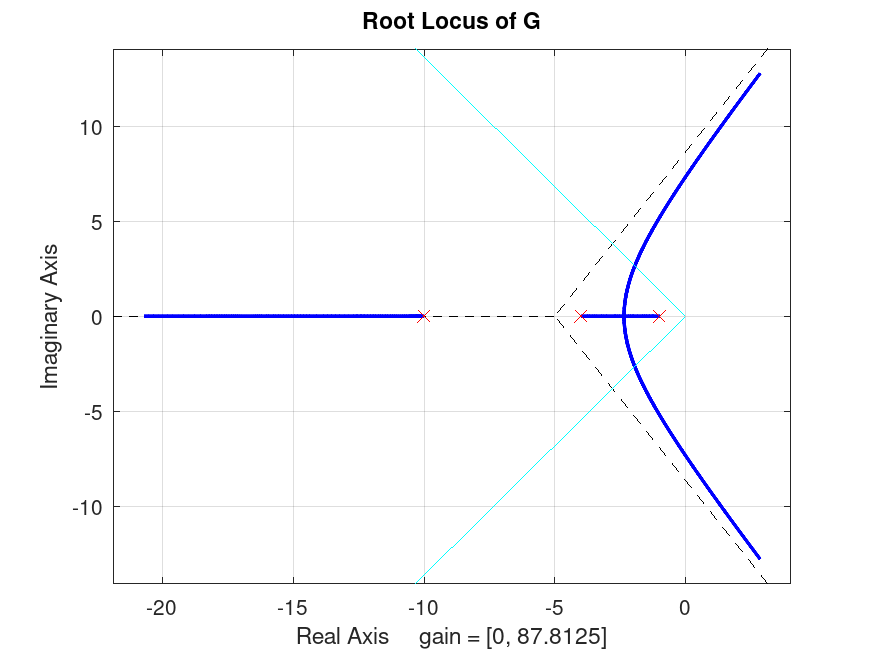
Podemos usar o comando >> legend off para sumir com o quadro que aparece junto a figura.
O Ocatve não possui uma função chamada rlocfind() como no caso do MATLAB, mas possui uma função similar: rlocusx().
No caso deste exemplo, resultaria em algo como:
>> figure; rlocusx(G)
O que acaba gerando uma figura como a mostrada à seguir:
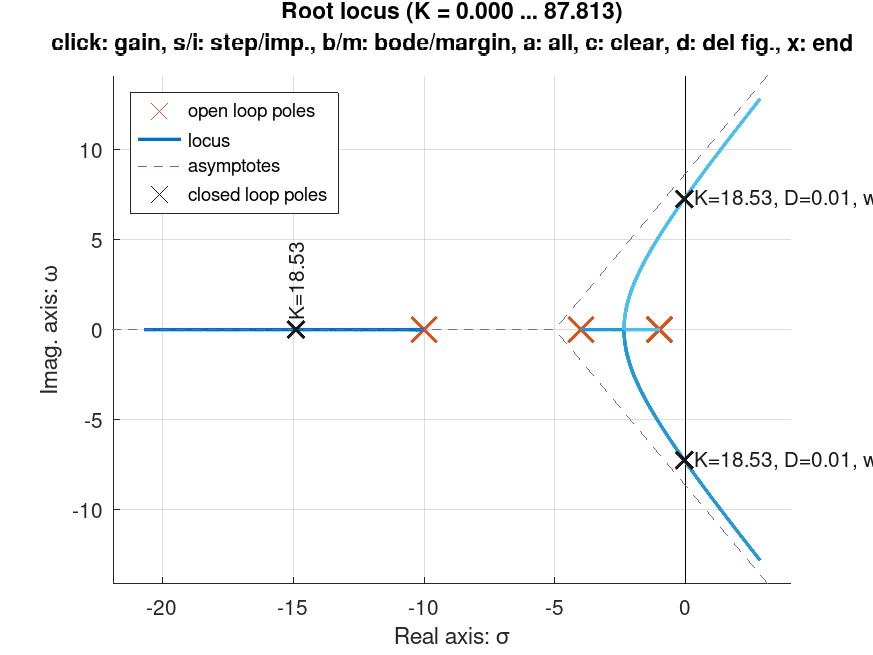
Mas note no exemplo anterior, que não foi possível imprimir uma linha guia para valores constantes de
Note que rlocuxx() entretanto traz outras opções. Uma vez ingressado este comando, a janela gráfica entra em modo interativo aceitando os seguintes comandos (https://octave.sourceforge.io/control/function/rlocusx.html):
| Tecla | Resultado |
|---|---|
| clique-esquerdo | mostra valor do ganho, polos de MF, |
| s | "step" = Resposta ao degrau unitário para ganho no ponto escolhido |
| b | "bode" = Diagrama de Bode |
| m | "margin" = Diagrama de Bode com margens de estabilidade (ganho e fase) |
| a | "all" = Plota os 4 gŕaficos anteriores |
| c | "clear" = limpa todas as anotações já feitas |
| d | "delete" = apaga todas as figuras abertas |
| x | "eXit" = sair do modo interativo |
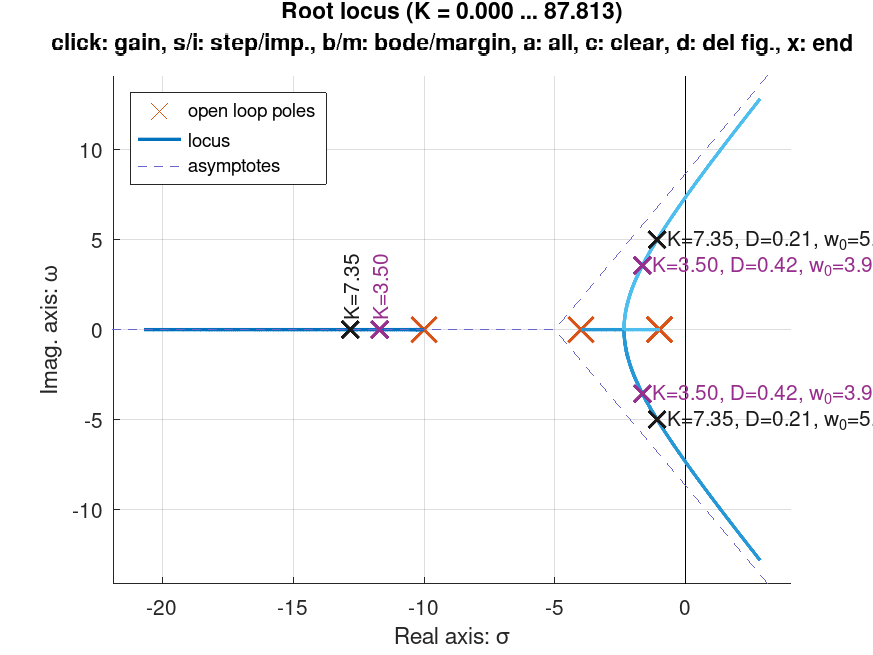
Por exemplo, apontando mais de uma posição no RL, podemos obter uma figura como:
O diagrama de bode com as margens de ganho e de fase são mostradas na próxima figura:
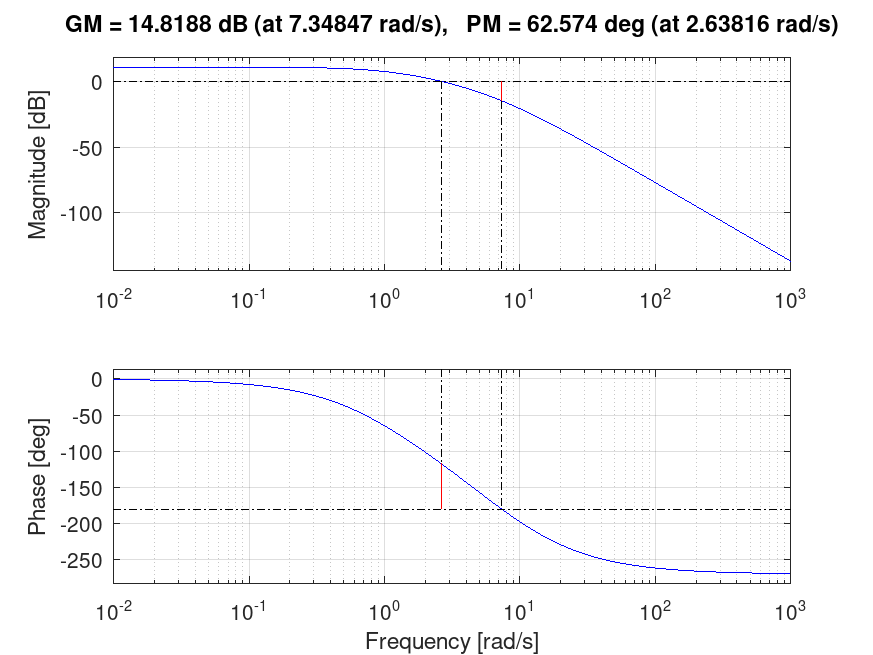
E a resposta à entrada degrau unitário para o ponto escolhido (
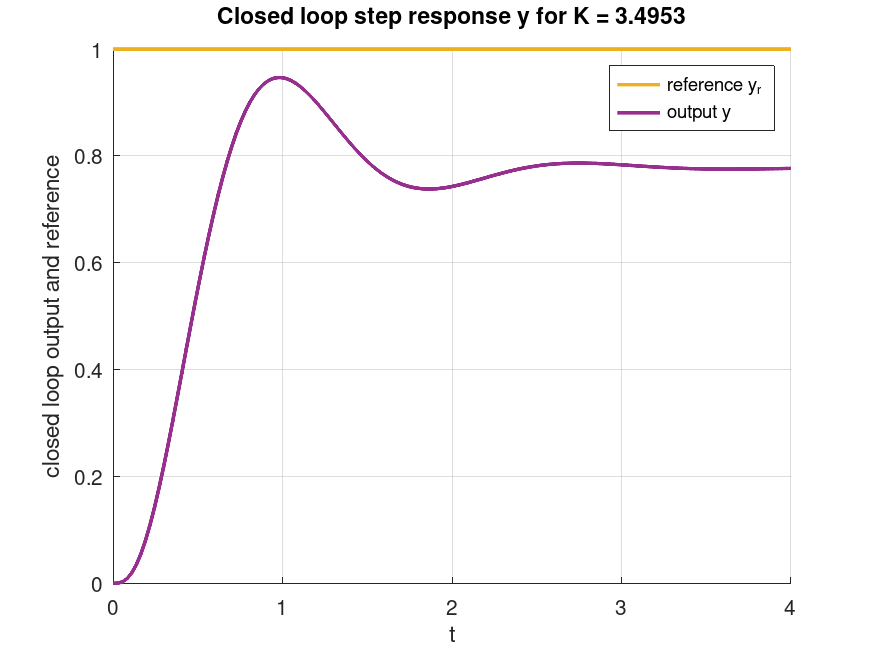
E clicamos "x" para sair do modo interativo e voltar para a janela de comandos do Octave.
A única limitação é que no RL mostrado, não aparece nenhuma linha guia referente a valores constantes de rlocusx() com sgrid2()...
Mas podemos tentar descobrir o ponto no RL com
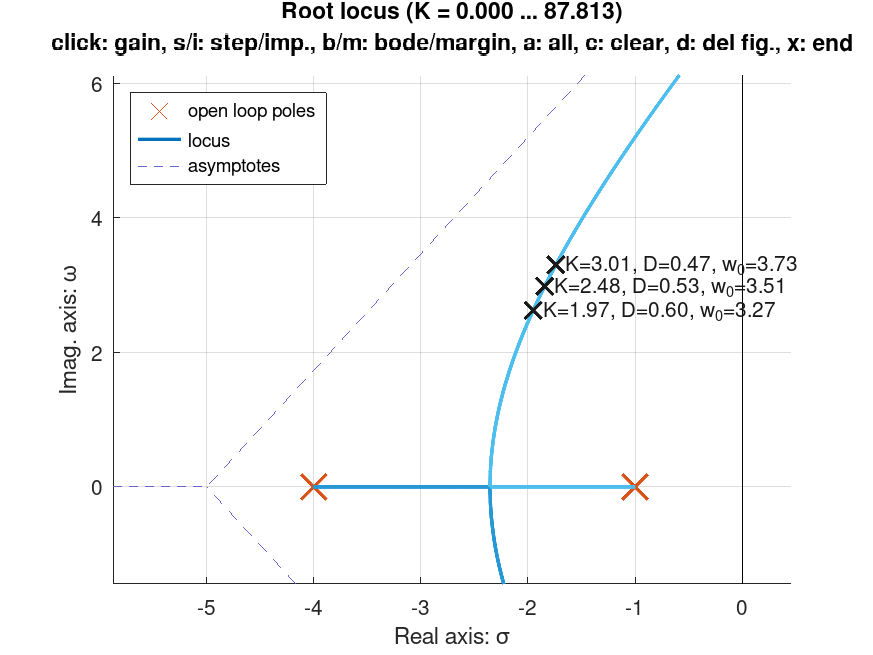
Encontramos um ganho aproximado de
Fechando a malha com
>> ftma=K*G
Transfer function 'ftma' from input 'u1' to output ...
78
y1: ------------------------
s^3 + 15 s^2 + 54 s + 40
>> H=tf(1,1)
Transfer function 'H' from input 'u1' to output ...
y1: 1
Static gain.
>> ftmf=feedback(ftma, H, -1)
Transfer function 'ftmf' from input 'u1' to output ...
78
y1: -------------------------
s^3 + 15 s^2 + 54 s + 118
Continuous-time model.
>> % gráfico da resposta ao degrau:
>> figure; step(ftmf)
>>
E a seguinte figura é gerada:
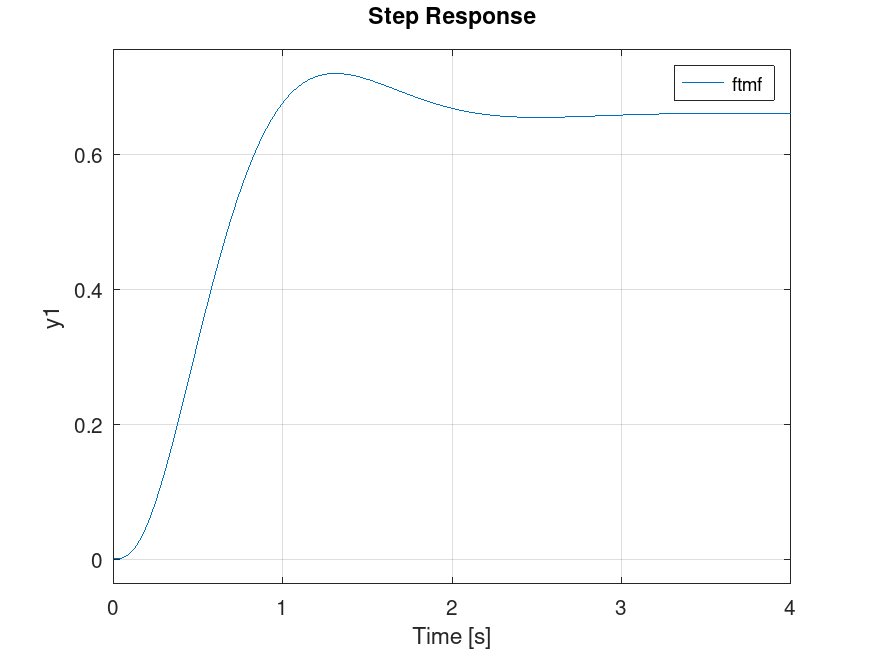
Percebemos um grande erro de regime permanente,
>> dcgain(ftmf)
ans = 0.6610
>> erro=(1-dcgain(ftmf))/1*100
erro = 33.898
>>
Por curiosidade, usando este controlador e limitando o erro à 10%, teríamos que usar outro valor de ganho:
Lembrando da Teoria do Erro:
onde
Neste caso,
Calculando a constante
Então
>> ftma2=9*G
Transfer function 'ftma2' from input 'u1' to output ...
360
y1: ------------------------
s^3 + 15 s^2 + 54 s + 40
Continuous-time model.
>> % Conferindo detalhes da FTMA2(s):
>> [z,p,k]=tf2zp(ftma2)
z = [](0x1)
p =
-10
-4
-1
k = 360
>>
>> ftmf2=feedback(ftma2, H, -1);
>> figure; step(ftmf2)
>>
E obtemos a resposta:
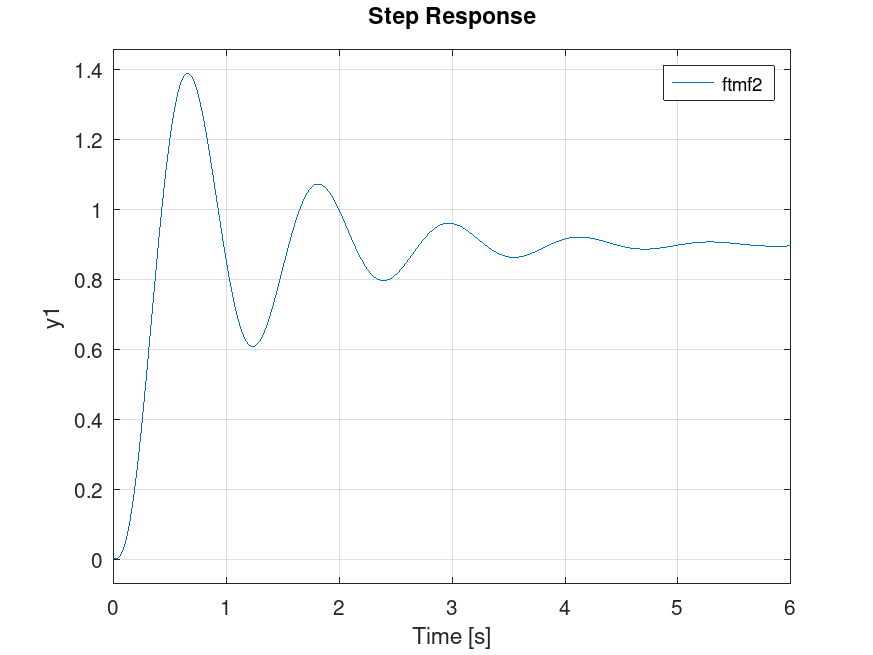
Faltaria obter informações sobre as características de resposta do sitema (função stepinfo() no MATLAB).
Outras funções do Octave
-
Blocos em série:
>> G = series(G1, G2) -
Blocos em paralelo:
>> G = parallel(G1, G2) -
Realimentação:
>> G = feedback(G1, G2, -1) -
Resíduos de uma função transferência:
>> [r,p,k]=residue (num,den)
Exemplo: Seja a seguinte função transferência:
supondo que esta função foi gerada à partir da eq. diferencial:
A expansão em frações parciais de (1), rende:
>> num=[4 6];
>> den=[2 10 16 8];
>> [r,p,k]=residue(num,den)
r =
-1
1
1
p =
-2
-2
-1
k = [](0x0)
>>
Resultado da expanção:
Lembrando da tabela de transformadas de Laplace:
vamos obter:
Fim