Teste de Onda Triangular
A título de experimentação a onda triangular com período de oscilação de 10 segundos e tensão variando entre 0 à 5 Volts, obtido a partir da saída PWM filtrada da placa Arduino One, foi aplicada diretamente numa das entradas do driver de potência (módulo SA150D).
O código usado para gerar a onda triangular é o mesmo já apresentado antes aqui: https://fpassold.github.io/Lab_Controle_2/Projeto_Final/onda_triangular.html.
Montagem realizada:
- A saída filtrada RC depois do pino 6 do Arduíno foi primeiramente diretamente conectada à entrada "1" do driver de potência (módulo SA150D);
- O canal 1 do osciloscópio foi conectada à entrada 1 do driver de potência para monitorar a tensão efetivamente aplicada;
- O canal 2 do osciloscópio foi conectado aos terminais 1 e 2 do tacogerador (módulo GT150X), para, através da d.d.p. gerada, monitorar no osciloscópio as velocidades alançadas pelo motor. Note que no painel do módulo GT150X, se realizada a conexão do pino 1 ao sei pino 3, e se sua chave seletora for ajustada para a posiçao tacho rpm, pode ser observado no painel deste instrumento, as velocidades geradas já convertidas para a escala de RPM. Não esquecer de alimentar o módulo GT150X se for desejado que o mesmo realize as medições. Se é apenas para monitorar a tensão gerada no tacogerador, não necessariamente este módulo necessita ser alimentado.
O que se prentede aqui é apenas reparar como o motor reage quando lhe é aplicado (em malha-aberta), uma tensão de entrada (no seu driver de potência) variando lentamente entre certa faixa de valores. Seria uma espécie de "controle´´ de velocidade em malha-aberta.
Observado:
Ocorre uma boa queda de tensão na saída filtrada do PWM (depois da rede RC), quando o sinal é efetivamente usado para excitar o módulo SA150D. Pôde ser observado na tela do osciloscópio que a tensão variou apenas entre 0 à 2,28 Volts aproximadamente. Isto significa que devemos acrescentar um Amp.Op. seguidor de tensão na saída do filtro RC. Mesmo assim, se comprovou que a velocidade do motor oscilou entre uns 250 RPM e pouco mais de 2000 RPM, quando excitado com esta forma de onda.
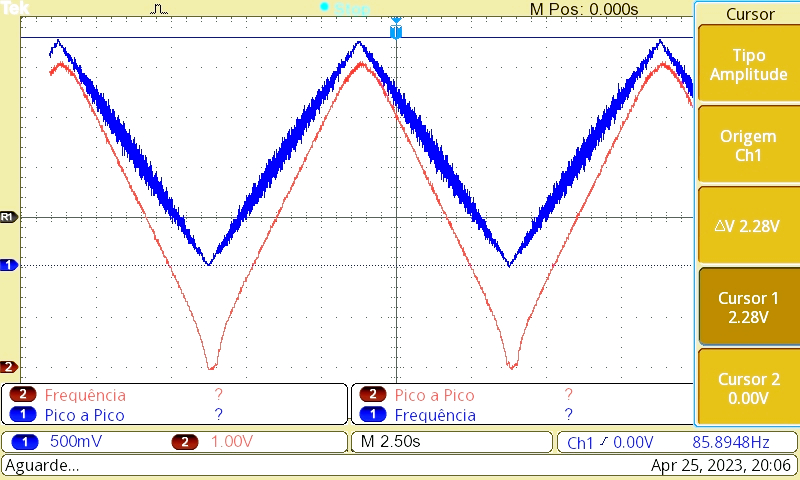
A figura acima mostra no canal 1 (curva azul), os níveis de tensão diretamente aplicados apenas à entrada 1 do driver de potência (módulo SA150D), sem passar por nenhum Amp.Op. isolador. E o canal 2, mostra as tensões desenvolvidas (d.d.p.) na saída do tacogerador do kit (módulo GTX150X), entre seus pinos 1 e 2. No painel deste instrumento pode-se captar leituras de RPM variando entre uns 250 RPM à pouco mais de 2000 RPM, significando que mesmo um sinal de controle oscilando entre 0 à 2,28 Volts é capaz de fazer variar o motor até sua velocidade máxima. Note que pode-se considerar o motor com certa carga, uma vez que estava acoplado ao eixo de saída do tacogerador, o potenciometro usado como sensor de posição angular (módulo OP150K). Mas... poderia-se ter incluído o freio magnético na montagem (módulo LU150L).
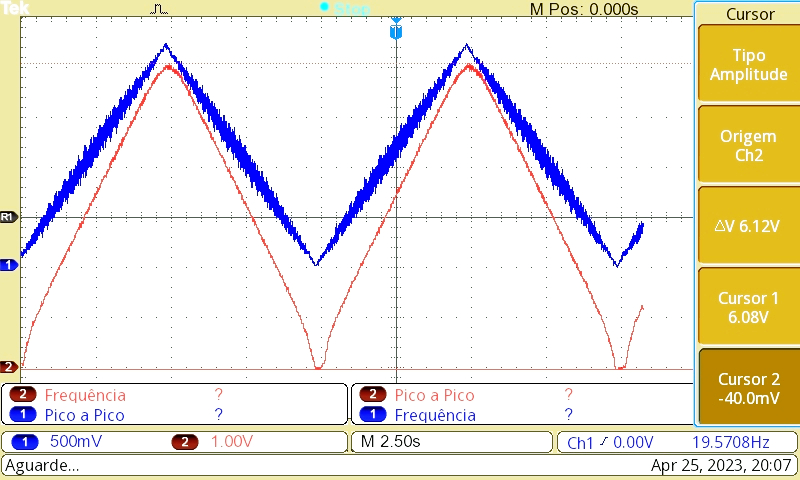
Já a próxima tela capturada se concentra nas amplitudes verificadas na saída do tacogerador, onde se pode regristrar um
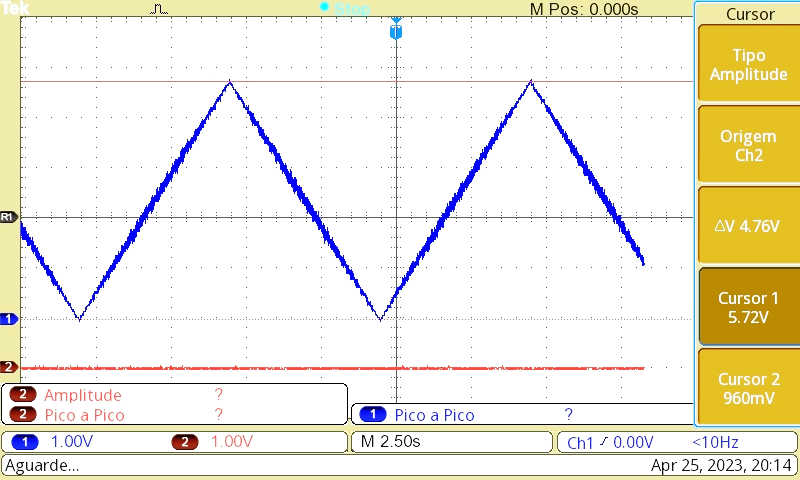
A próxima figura comprova as amplitudes originalmente esperadas na saída do filtro RC da saída PWM (pino 6) do Arduino. Nota-se que era esperada uma amplitude de oscilação entre:
Por fim, foi usado o Amp.Op. (módulo OA150A) do kit Feedback para trabalhar comum um ''buffer isolador´´ entre a saída PWM filtrada do Arduino e o sinal de entrada no driver de potência (módulo SA150D). Neste caso, a chave seletora de ''feedback selector`` foi ajustada para a posição do resistor de 100K
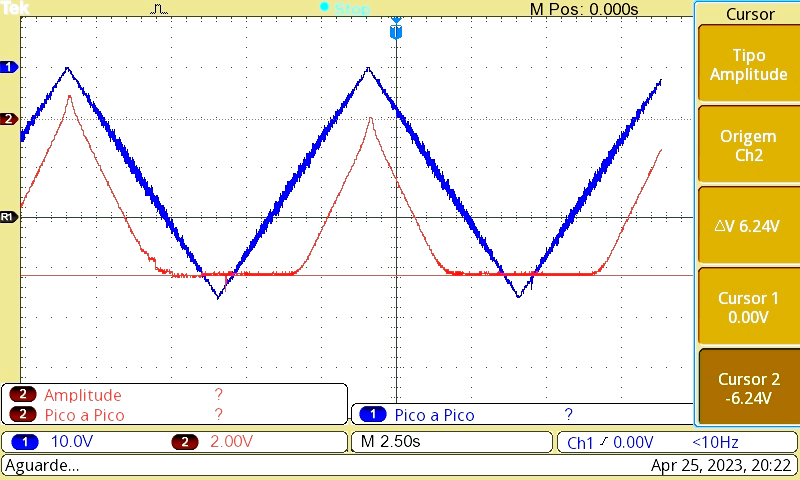
Neste caso, percebe-se que a amplitudo de sinal de entrada no módulo SA150D variou entre: -6, à 0 Volts. O sentido de giro do motor se inverteu em comparação ao teste anteiror. Mas, o motor se comportou de forma ligeiramente diferente, acusando alguma saturação no driver de potência SA150D. Note a parte infeior achatada da curva vermelha, acusando que o motor praticamente ''saturou´´ próximo da velocidade máxima (Cursos 2 em -6,24 Volts), o implica que não parece ser interessante repassar tensões
Fernando Passold, em 25/04/2023.