Sintonia de PID em Controle de Posição (angular)
A ideia neste laboratório é realizar controle de posição em malha-fechada, baseado em controlador analógico PID. Incluindo a sintonia do controlador PID para este processo.
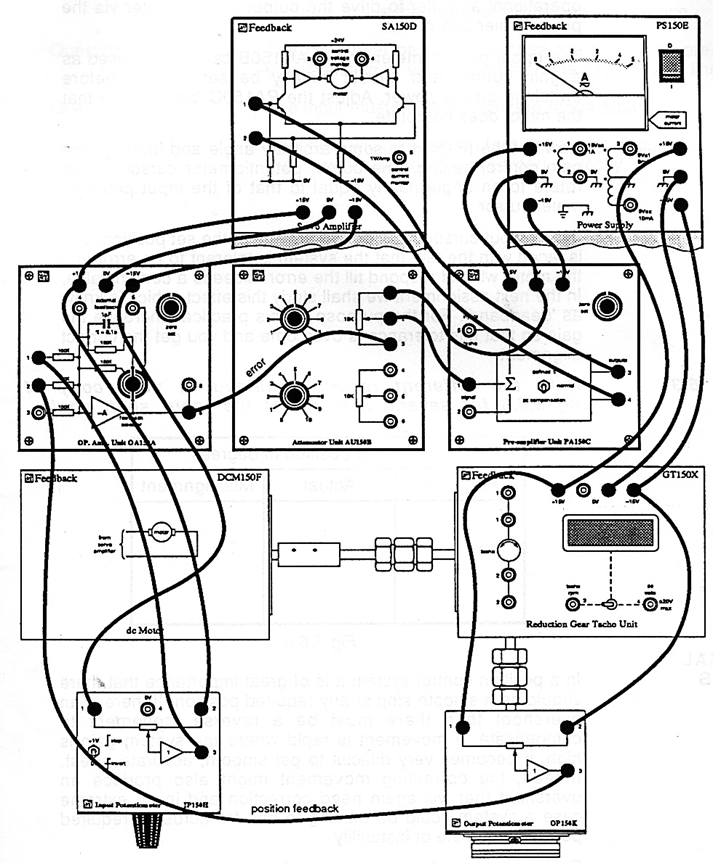
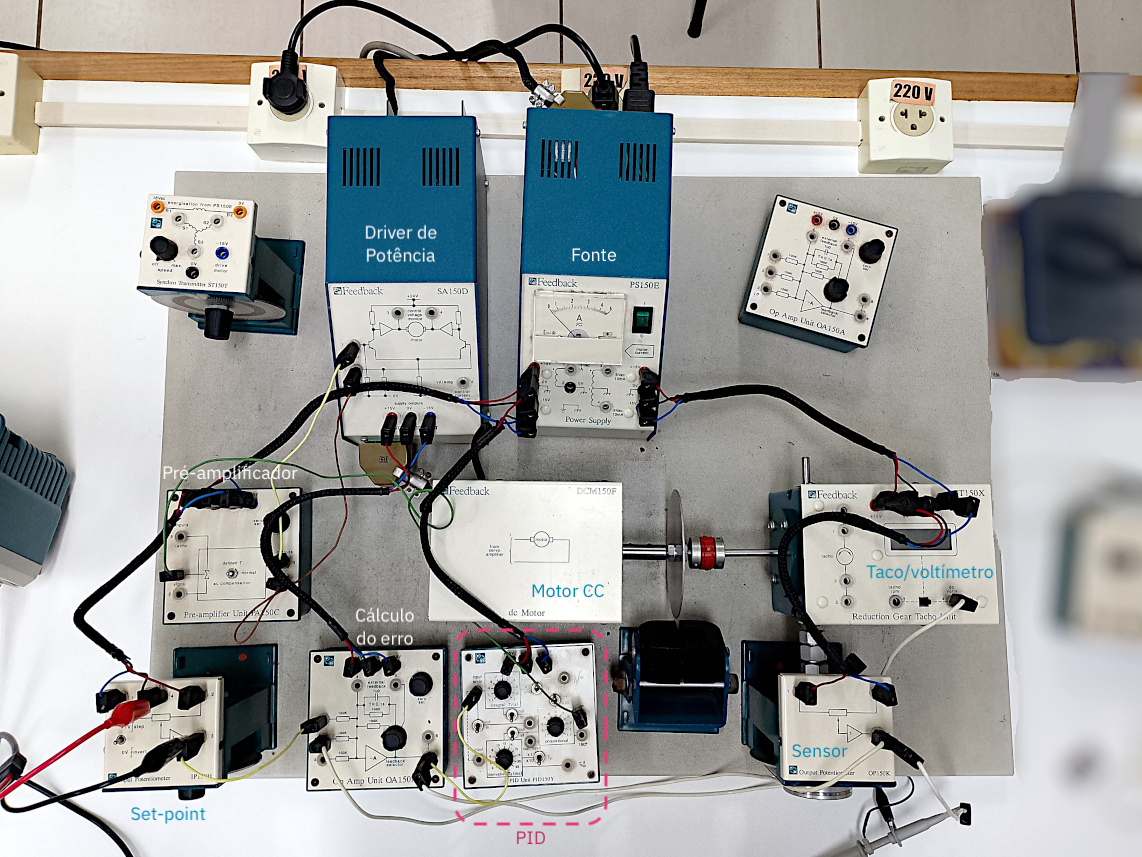
A próxima figura mostra as ligações usadas para realizar um controle proporcional de posição em malha-fechada usando o kit da Feedback:
O diagrama de ligações pode ser redesenhado da seguinte forma, para compreender melhor a malha de realimentação:
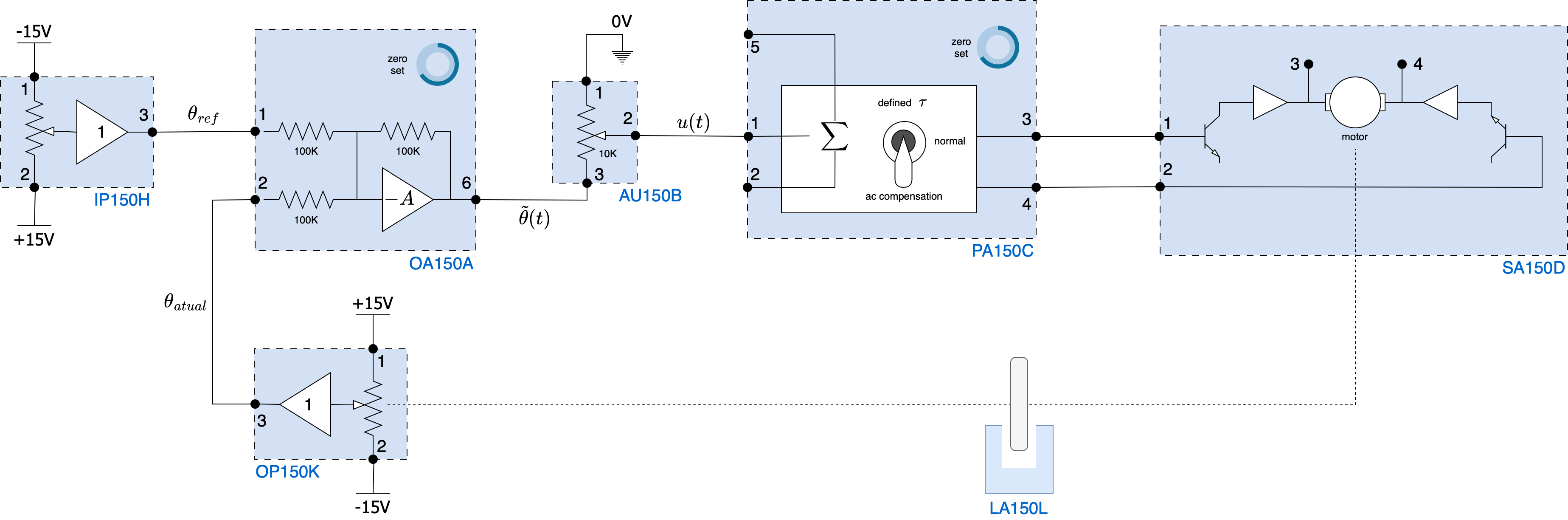
Note pela figura anterior, que um potenciômetro (módulo OP150K) será usado como sensor de posição angular (lembrar que sua faixa de operação fica limitada entre ). Outro potenciômetor, IP150H atua como divisor de tensão gerando a referência (posição angular desejada). Algo como:
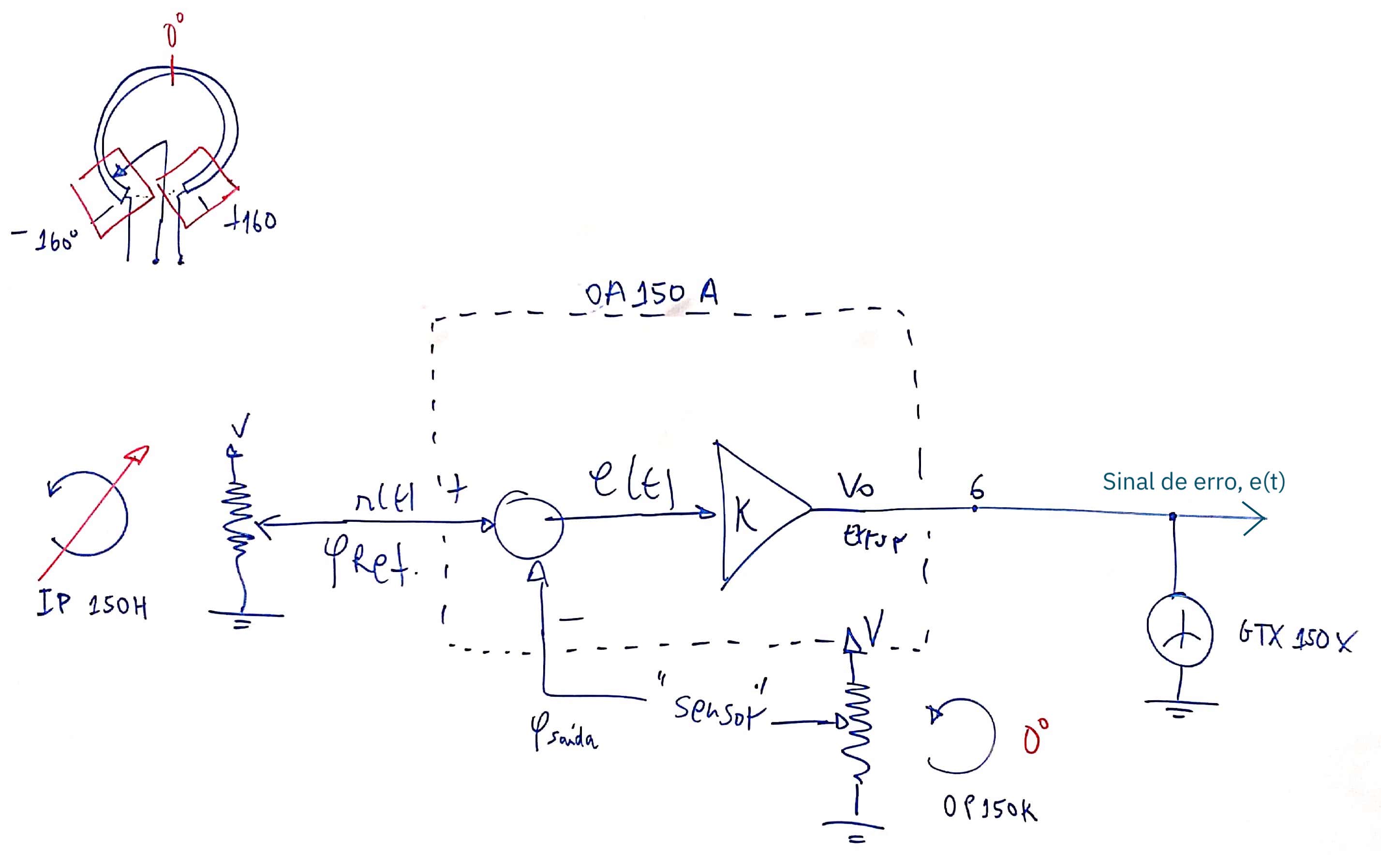
Perceba que as polaridades geradas pelos módulos IP150H e OP150K entram propositalmente invertidas no módulo do Amp.Op. (OA150A), que desempenha o papel associado com o "cálculo'' do sinal de erro, . Ambos os módulos IP150H e OP150K são simples potenciometros atuando como divisores de tensão.
O módulo OA150A realiza (na sua saída 6):
A saída do OA150A antes de ser entregue diretamente ao driver de potência (módulo SA150D), passa antes por um ajuste de ganho (módulo AU150B), que permite "dosar" (reduzir a tensão do erro) que depois é repassado para o módulo pré-amplificador PA150C. O potenciômetro AU150B atua definindo o "ganho proporcional" desejado (neste caso: ).
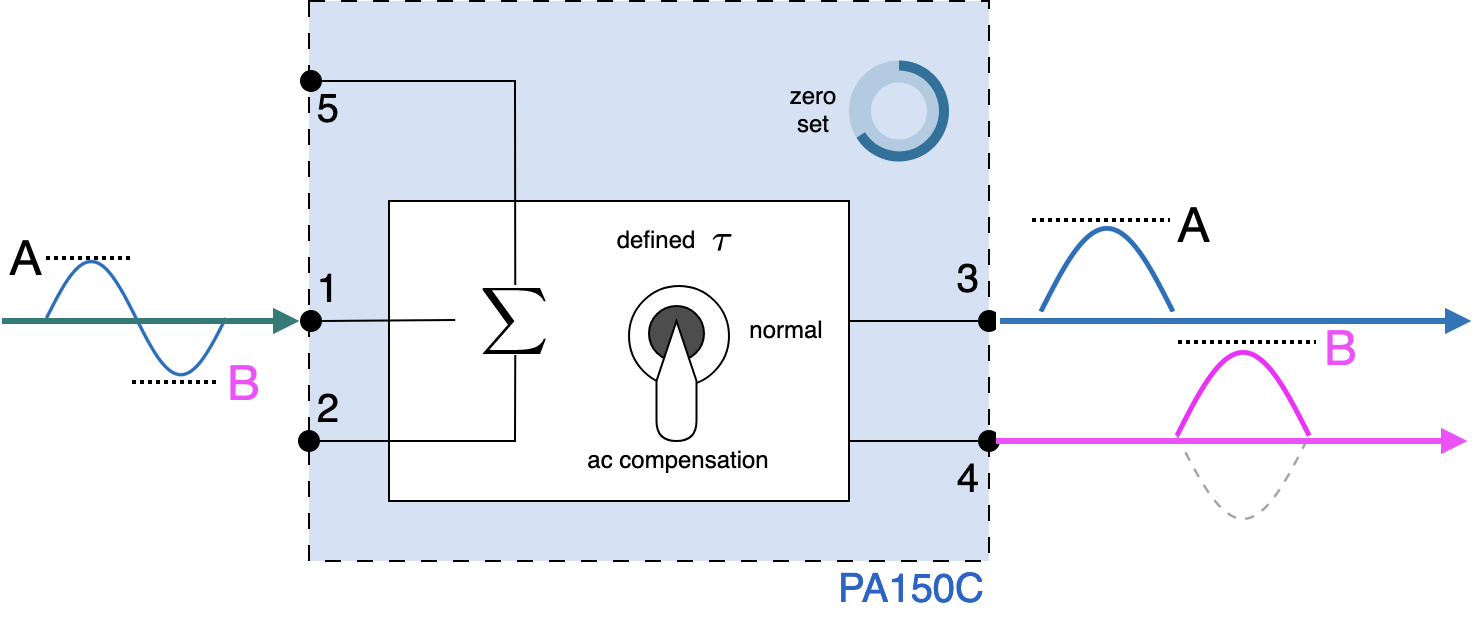
O módulo PA150C que recebe o sinal do potenciômetro gera tensões diferenciadas (saídas 3 e 4) necessárias para comandar as entradas 1 e 2 do driver de potência (SA150D), o que permite um "jogo de balanço corrente'' na armadura do motor e consequente giro no sentido horário ou anti-horário do motor. A figura abaixo esclarece o funcionamento do módulo pré-amplificador PA150C:
No caso deste laboratório, nossa intenção é realizar o controle de posição fechando a malha usando o PID, trocamos o módulo AU150A (potenciômetro responsável pela definção do ganho proporcional), pelo módulo do PID.
A montagem anterior, considerando a incorportação do PID analógico fica algo como:
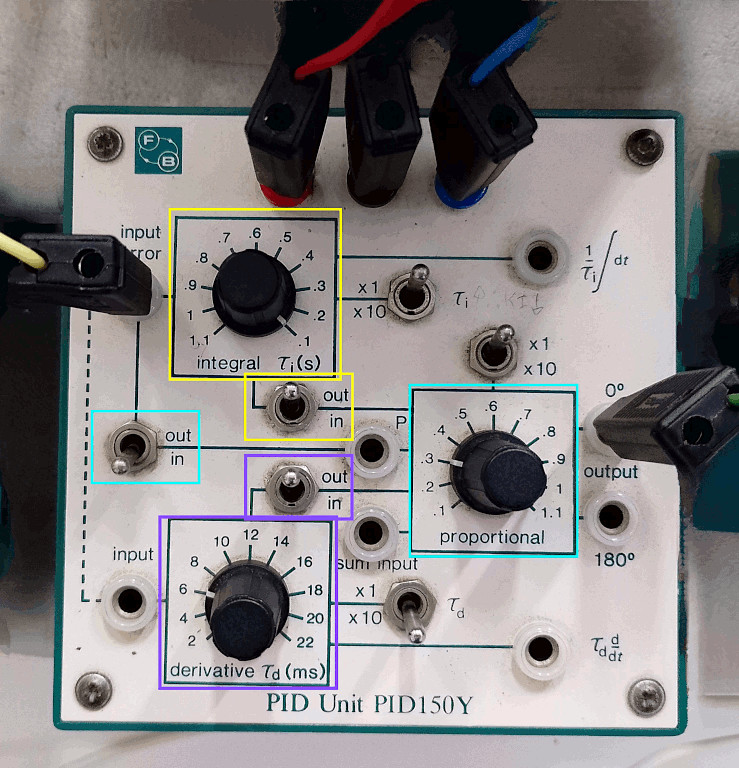
O módulo do PID (PID150Y) aparece destacado na figura abaixo:
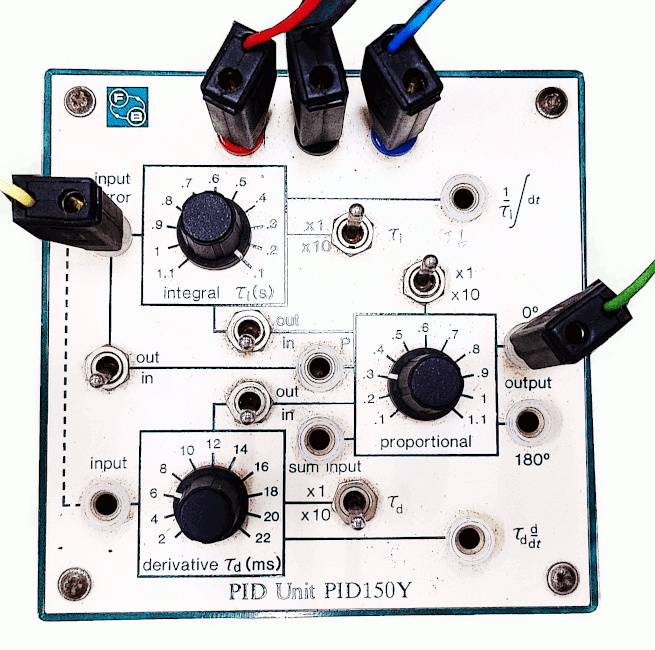
Notamos que podemos selecionar através de chaves quando é desejada a ação Proporcional, Integral e Derivativa. E existem outras chaves para variar a amplitude do ganho proporcional ou amplitude dos tempos derivativos e integrativos.
Ajuste do PID
Se sugere o uso do método 2 para ajuste inicial do PID. Isto implica inicialmente desligar propositalmente as ações integrativas e derivativas, mantendo apenas a ação proporcional.
O estudante deve então ajustar o potenciômetro asscoiado com o ganho da ação Proporcional (e eventualmente comutar a chave para ajuste da escala de ganho da ação proporcional) para encontrar o valor do ganho máximo que coloca o sistema na condição de oscilação sustentada.
| Ganho | Ganho |
|---|---|
 |  |
A oscilação produzida na saída do sistema deverá ser observada com a ajuda de um osciloscópio, uma vez que o mesmo será necessário para determinar o período da oscilação, . LIgação do kit ao osciloscópio: conectar o canal 1 do osciloscpópio na saída do potenciômetro que define a referência para o sistema (módulo IP150H, saída 3) e o canal 2 na saída do potenciômetro usado como sensor de posiçao (módulo OP150K, saída 3).
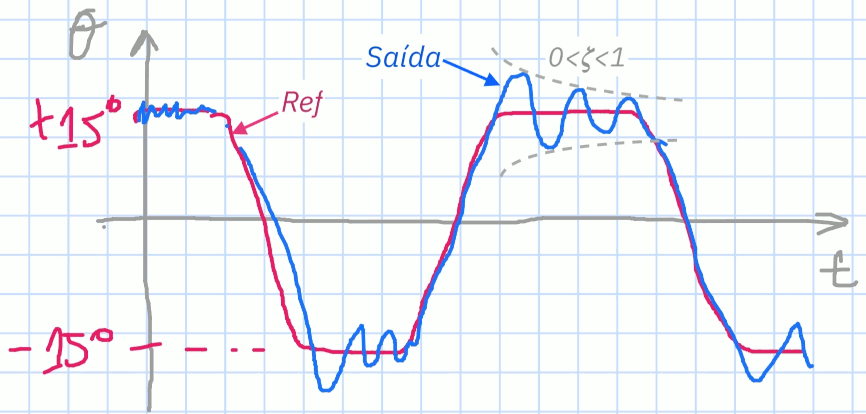
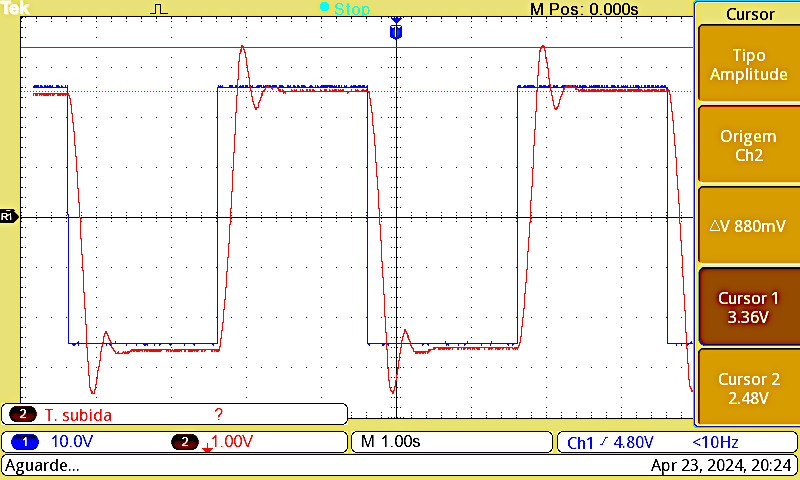
A medida que o estudante aumenta o valor do ganho, pode comprovar resultados gráficos na tela do osciloscópio, similares aos mostrados abaixo:
A figura acima retrata o resultando obtido quando o sinal de referência passa a ser gerado por um gerador de sinais, conectado à entrada 1 do módulo OA150B (que calcula o erro; realiza a comparação). Este gerador passa a gerar o sinal de referência, . Para isto ele deve ser ajustado da seguinte forma:
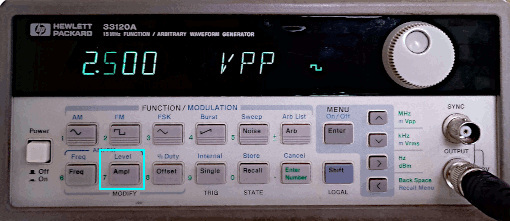
onda quadrada (simula uma entrada degrau comutando entre 2 valores extremos);
frequência de oscilação de: 0,2 Hz:

amplitude de pico de: 2,5 Volts (o que gera um sinal comutando entre Vots até Volts) que equivale a fazer a referência comutar entre até . Note que esta frequência de 0,2 Hz, faz a onda quadrada se manter em cada um destes níveis de tensão por 5 segundos ():
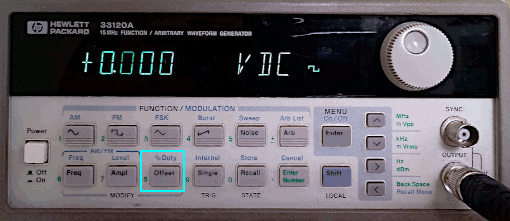
offset ajustado em 0 (zero) Volts:
O gerador facilita bastante no processo de sintonia do PID pois faz variar de forma "automática" a referência.
Note que o canal 1 do osciloscópio deve ser conectado à saída do gerador ou entrada 1 do módulo OA150B.
Já o canal 2 do osciloscópio deve ser conectado na saída 3 do potenciômetro sensor de posição (módulo OP150K) ou Na entrada 2 do módulo comparador (OA150A).
O que o usuárioa deve fazer agora é "desligar" (chaves na posição "out") as ações Integrativas e Derivativas do PID (módulo PID150Y) e manter "ligada" apenas a chave correspondente à ação Proporcional, como mostrado na figura abaixo:
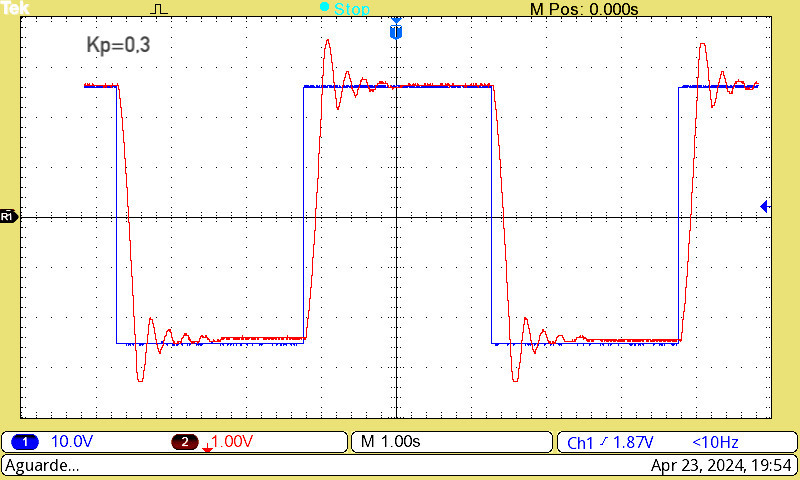
Em seguida, o usuário deve ir aumentando o ganho Proporcional. No osciloscópio serão observadas ondas como:
Á medida que o ganho proporcional é aumentado, o overshoot aumenta e a amplitude das oscilações acaba se mantendo:
| 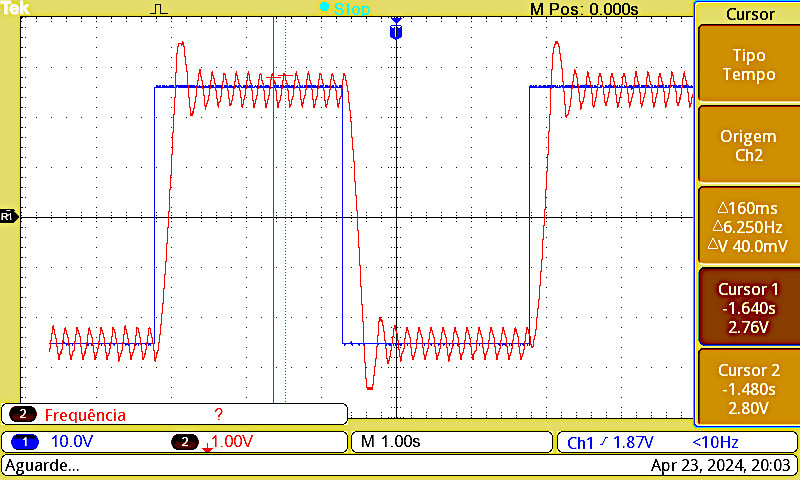 |
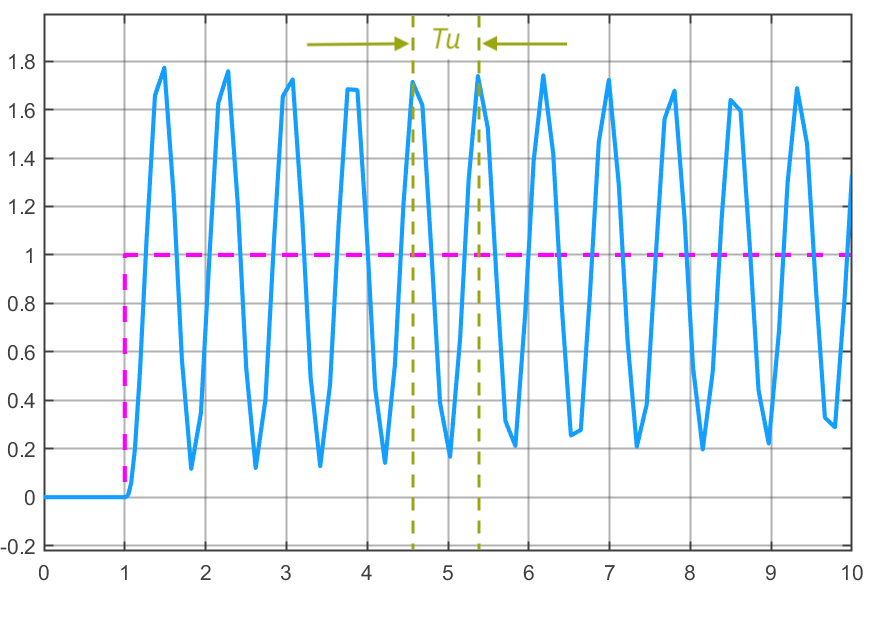
O processo fica oscilando como mostra a figura abaixo:
Depois que o estudante encontra o valor prático de (ultimate gain) e (período de oscilação; determinado com ajuda do osciloscópio), se faz necessário acessar alguma Tabela de Ziegler-Nichols para testar valores sugeridos para os parâmetros (ganho proporcional), (tempo de integração) e (tempo derivativo) para um primeiro teste do PID analógico:
| Controlador | |||||
|---|---|---|---|---|---|
| P | – | – | – | – | |
| PI | – | ||||
| PD | – | – | |||
| PID clássico | |||||
| Regra Integrador de Pessen | |||||
| Algum overshoot | |||||
| Sem overshoot |
Tabela originalmente diponível em: https://en.wikipedia.org/wiki/Ziegler%E2%80%93Nichols_method (acessado em 13/10/2022).
Neste primeiro teste do PID são esperado overshoots elevados, algo como:
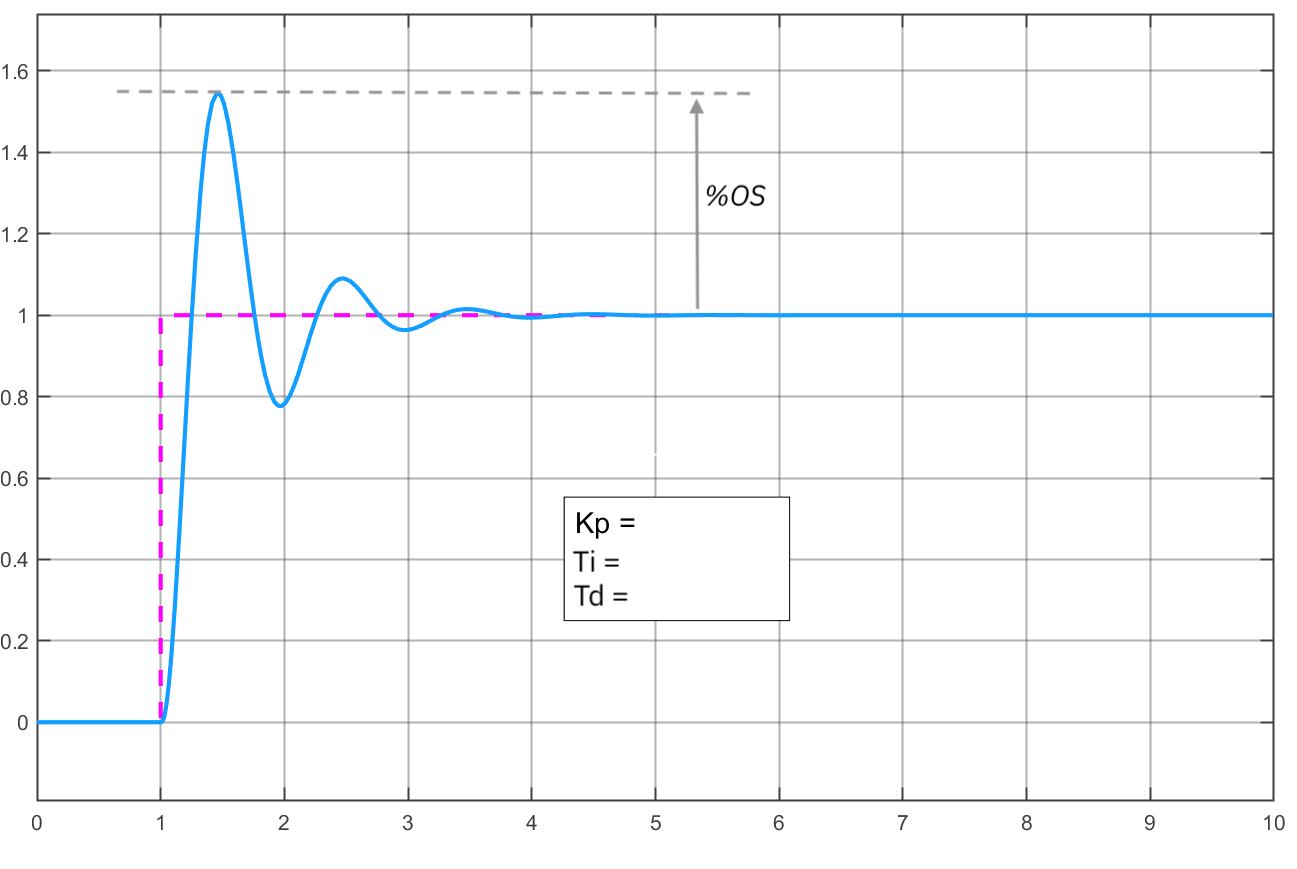
Inicialmente podem ser encontrados resultados como:
Neste caso: .
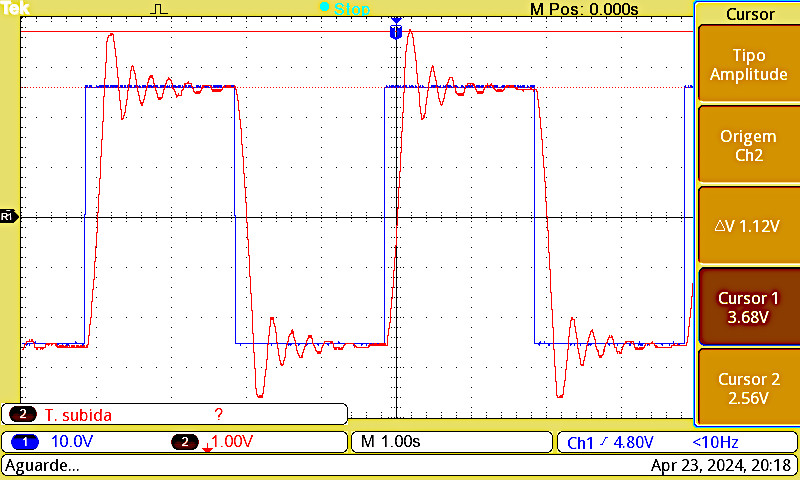
Depois, uma sintonia fina dever ser conduzida para determinar os valores finais dos parâmetros do PID para tentar limitar o .
O estudante deve apresentar as telas capturadas do osciloscópio para comprovar os ajustes realizados usando o PID: o primeiro ajuste refletindo a simples adoção dos valores sigeridos por Ziegler-Nichols e uma segunda tela mostrando o resultado da "sintonia fina" do PID.
Questões
- Apresentar o esquema de ligações elétricas dos módulos Feedback incorporando o controlador PID.
- Apresentar um diagrama em blocos equivalente do sistema realizada na prática.
- Apresentar o valor encontrado para e , mostrando a tela capturada na saída do osciloscópio comprovando a oscilação sustentada.
- Apresentar os cálculos dos parâmetros iniciais do PID: , e . O módulo PID150Y parece contemplar um PID no formato ISA, onde alterar o ganho também implica alterar os valores iniciais encontrados para e .
- Mostrar o resultado obtido na prática com a sintonia inicial do PID baseada no método 2. Mostrar a tela do osciloscópio.
- Realizar o posterior "ajuste fino'' do PID, variando seus parâmetros para limitar o sobressinal a no máximo 10%.
Fim.
Fernando Passold, em 11/04/2023