Projeto de Controladores Digitais usando RL
Projeto de Controladores Digitais usando RLIngressando PlantaControlador ProporcionalControle Proporcional com resposta super-amortecidaControlador Proporcional para %OS = 15%
Ingressando Planta
Obs.: dorvanente neste curso, vamos usar sempre a mesma placa, um modelo de 3a-ordem para realizar diferentes projetos de controladores.
Ingressando com a planta (mundo contínuo):
x>> G=tf(1, poly([-1 -2 -10]))G = 1 ------------------------ s^3 + 13 s^2 + 32 s + 20 Continuous-time transfer function.>> zpk(G) % para perceber pólos e zerosans = 1 ------------------ (s+10) (s+2) (s+1) Continuous-time zero/pole/gain model.>> T=0.1; % periodo de amostragem>> BoG= c2d(G, T) % incluindo sustentador de ordem zero, cálculo de BoG(z)BoG = 0.0001222 z^2 + 0.0003591 z + 6.391e-05 --------------------------------------- z^3 - 2.091 z^2 + 1.375 z - 0.2725 Sample time: 0.1 secondsDiscrete-time transfer function.>> zpk(BoG)ans = 0.00012224 (z+2.747) (z+0.1903) -------------------------------- (z-0.9048) (z-0.8187) (z-0.3679) Sample time: 0.1 secondsDiscrete-time zero/pole/gain model.Controlador Proporcional
Iniciando com controlador mais simples possível. Ganho proporcional. E usando valor unitário. Verificando o que acontece com o sistema em MF.
xxxxxxxxxx>> K=1;>> ftmf=feedback(K*BoG, 1)ftmf = 0.0001222 z^2 + 0.0003591 z + 6.391e-05 --------------------------------------- z^3 - 2.091 z^2 + 1.375 z - 0.2725 Sample time: 0.1 secondsDiscrete-time transfer function.>> step(ftmf) % resposta à referência (degrau unitário)A resposta deste sistema para referência sendo um degrau unitário é mostrado na próxima figura:
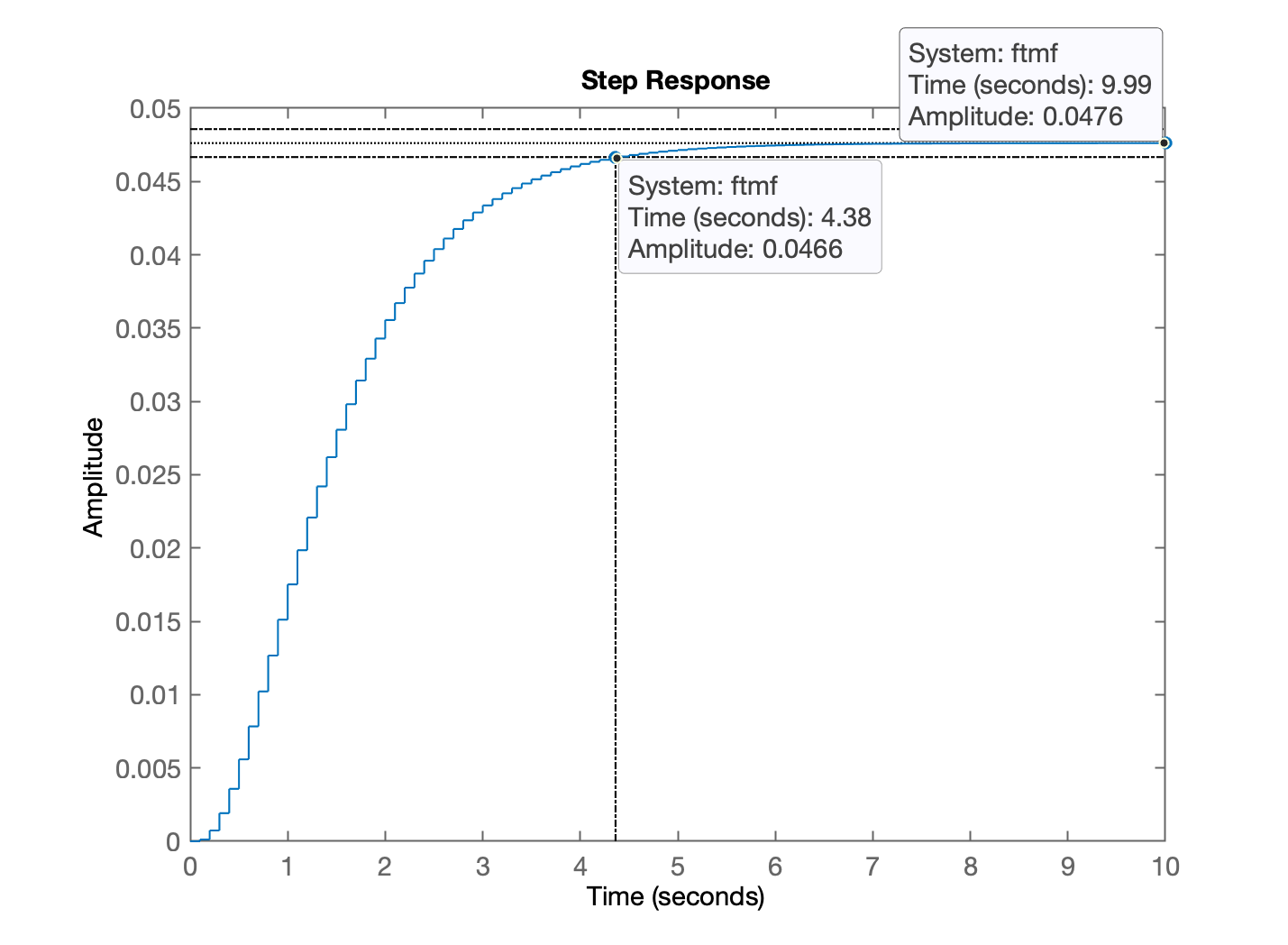
Percebe-se que obviamente fechar a malha com um simples controlador proporcional com ganho unitário "não resolve" o sistema em MF (erro elevadíssimo, a saída do sistema em MF, deveria alcançar a mesma amplitude da referência adotada, o degrau unitário, e no caso: ).
Para começar a compreender este sitema começamos levantando o RL (Root Locus) do sistema:
xxxxxxxxxx>> rlocus(BoG)>> xlim([-8 2]) % concentrando o RL numa certa regiãoAssim, para esta planta (), obtemos o seguinte diagrama do lugar geométrico das raízes:
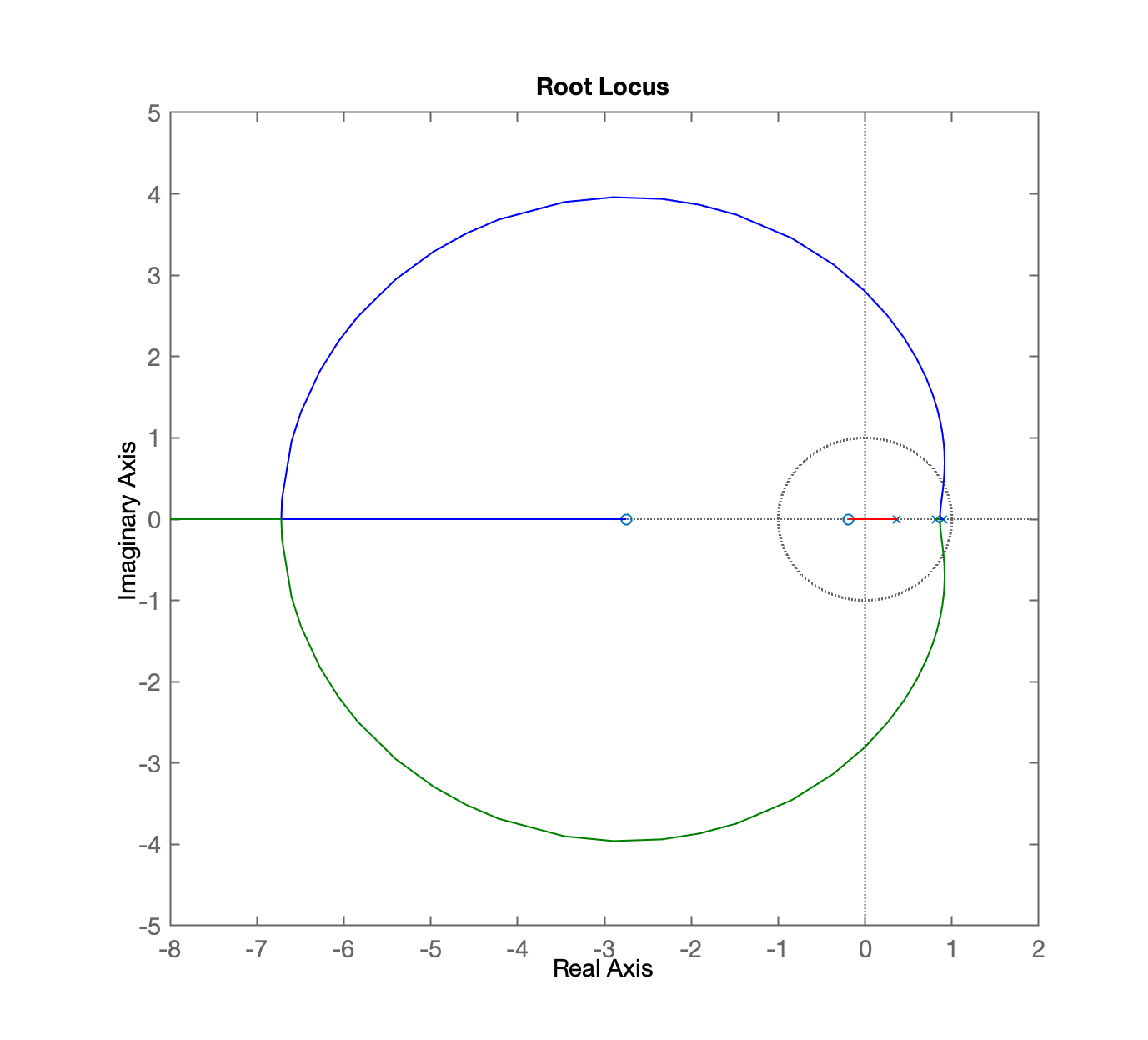
Interpretando o RL...
xxxxxxxxxx>> zpk(BoG) % lembrando da eq. de BoG(z)ans = 0.00012224 (z+2.747) (z+0.1903) -------------------------------- (z-0.9048) (z-0.8187) (z-0.3679) Sample time: 0.1 secondsDiscrete-time zero/pole/gain model.>> % Realizando zoom na região de interesse>> axis([0.5 1.1 -0.6 0.6])Aproveitmos que estamos com um "zoom" sobre a região de interesse do RL e acrescentamos a linha guia correspondendo à certo fator de amortecimento, , que depende do overshoot tolerado para mesmo, neste caso, estipulamos :
xxxxxxxxxx>> OS=15;>> zeta=(-log(OS/100))/(sqrt(pi^2+(log(OS/100)^2)))zeta = 0.5169>> hold on; zgrid(zeta,0)Agora temos um RL na região de interesse com informações relevantes sobre faixas de ganho possíveis:
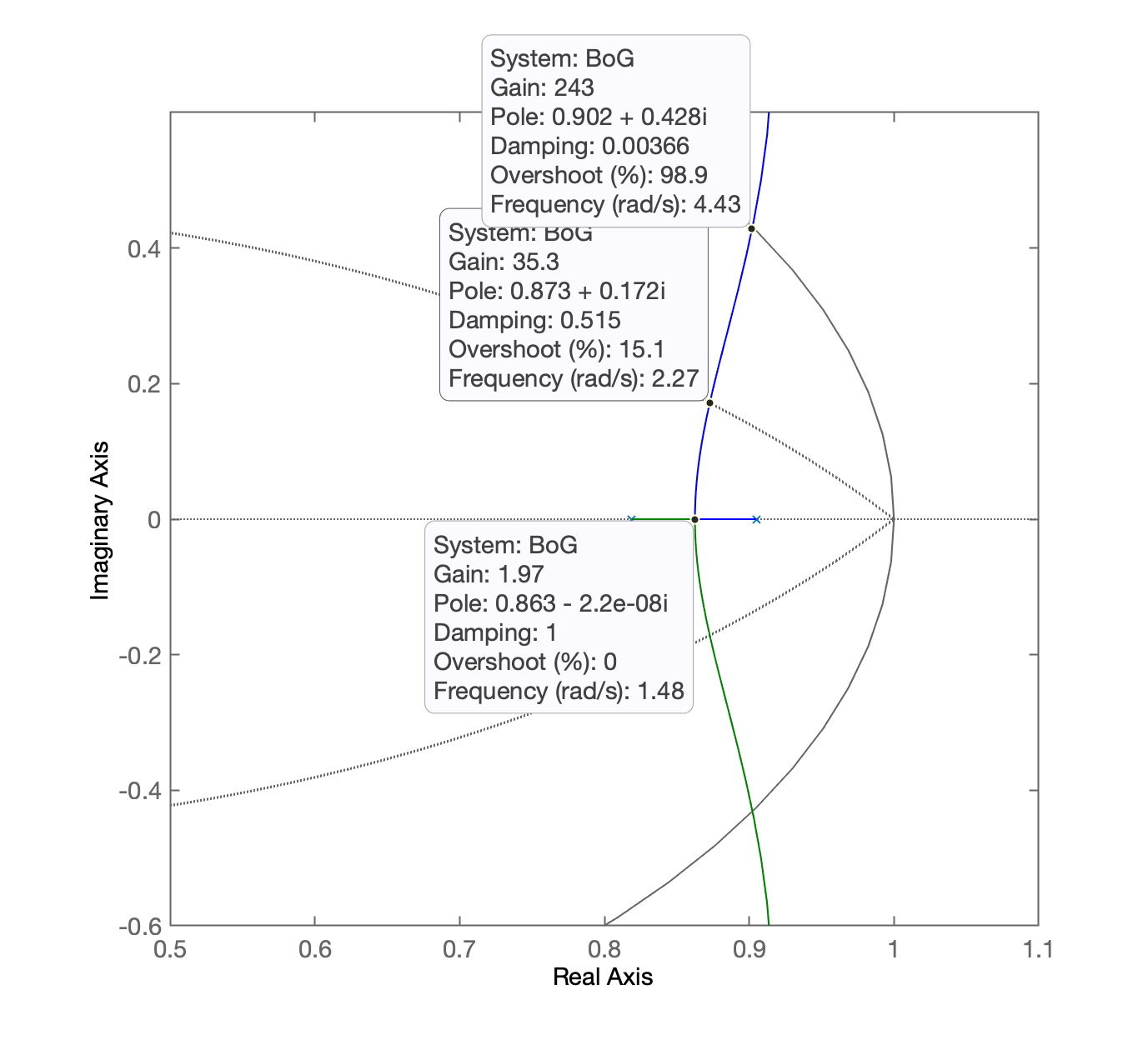
Comentários:
- Se for adotado , teremos 2 pólos de MF dominantes ainda com parte imaginária nula, o que significa resposta super-amortecida (sem overshoot);
- Se for adotado , teremos 2 pólos de MF dominantes com parte imaginária não nula, isto implica em resposta sub-amortecida (com oveshoot), no caso, com .
- O ganho máximo, , o que significa que se , teremos um sistema instável em MF.
Aprimorando nossos projetos de controladores proporcionais...
Controle Proporcional com resposta super-amortecida
Como podemos notar pelo RL anterior, com , ainda temos pólos de MF dominantes com apenas partes reais (parte imaginária nula). Verificando:
xxxxxxxxxx>> K=2;>> ftmf=feedback(K*BoG, 1)ftmf = 0.0002445 z^2 + 0.0007181 z + 0.0001278 --------------------------------------- z^3 - 2.091 z^2 + 1.376 z - 0.2724 Sample time: 0.1 secondsDiscrete-time transfer function.>> pole(ftmf)ans = 0.8625 + 0.0050i 0.8625 - 0.0050i 0.3661 + 0.0000i>> figure; step(ftmf)>> title('Controlador Proporcional (sem overshoot)')Via comando pole() anterior, notamos que com , o sistema em MF já possui pólos dominantes de MF com parte imaginária não nula (pólos de MF em ), com valores reduzidos, mas não nulos, o que implica num reduzido e eventualmente imperceptível overshoot:
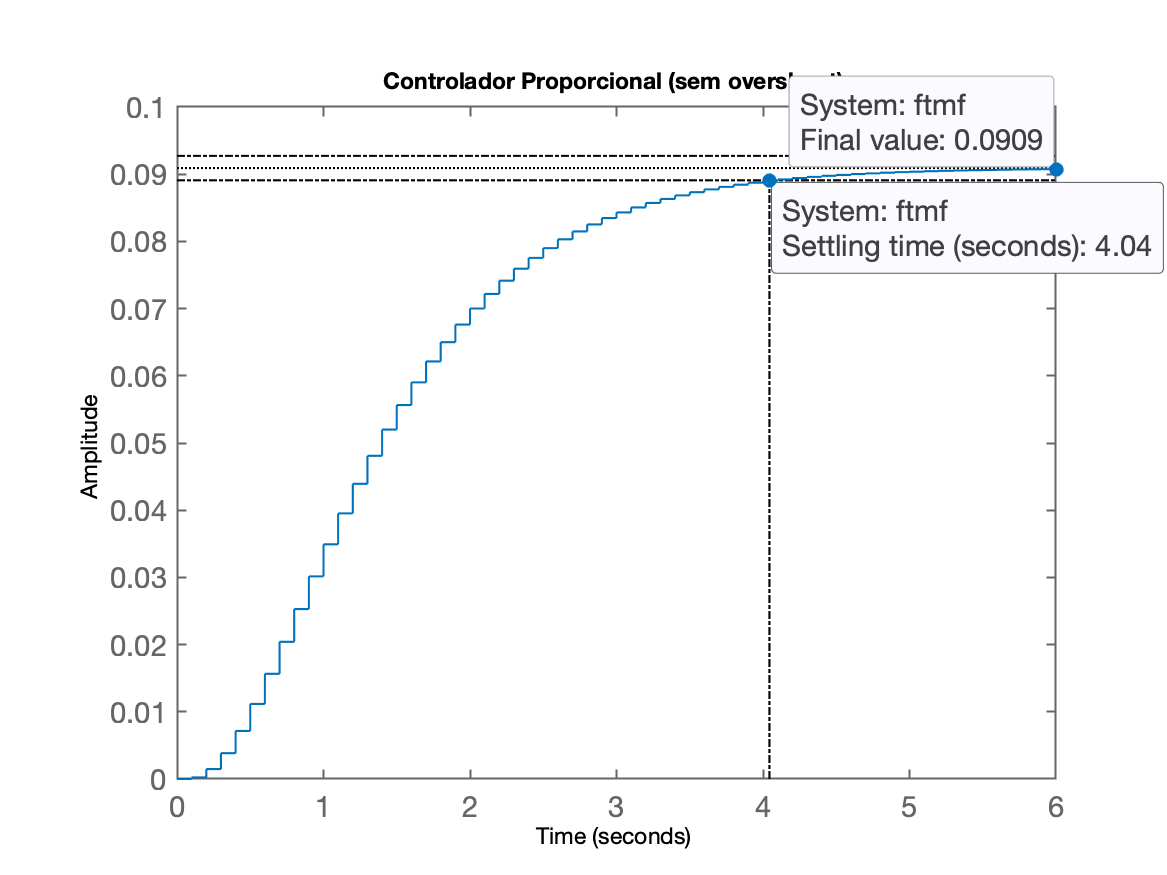
Note ainda que o valor em regime permanente da resposta do sistema está muito abaixo da referência desejada (valor unitário == degrau unitário). Isto se deve ao baixo ganho estático (DC) do sistema em MF:
xxxxxxxxxx>> dcgain(ftmf)ans = 0.0909Este valor de ganho implica num erro ainda muito elevado:
xxxxxxxxxx>> erro=((1-dcgain(ftmf))/1)*100erro = 90.9091Notar que o ganho DC da planta é baixo:
xxxxxxxxxx>> dcgain(BoG)ans = 0.0500Isto significa que em malha-aberta, aplicar um degrau unitário na planta, fará a mesma atingir no máximo o valor: .
No caso do sistema em MF, o ganho do mesmo em MF continua sendo baixo. Neste caso, quer dizer que se queremos que o sistema em MF alcance , temos que injetar uma referência com valor:
xxxxxxxxxx> 1/0.0909ans = 11.0011>> Ou aumentar bastante o ganho proporcional. Aumentar o ganho vai reduzir o erro (rever Teoria do erro para sistemas tipo 0). Mas com certeza teremos pólos de MF complexos, isto é, uma resposta oscilatória (com overshoot, oscilações).
Controlador Proporcional para %OS = 15%
Pelo RL levantado anteriormente, podemos aumentar o ganho tentando restringir o sobresinal à 15%, ajustando o ganho em :
xxxxxxxxxx>> K=35;>> ftmf=feedback(K*BoG, 1);>> figure(2); title('Controlador Proporcional (sem overshoot)')figure;step(ftmf)title('Controlador Proporcional (%OS=15%)')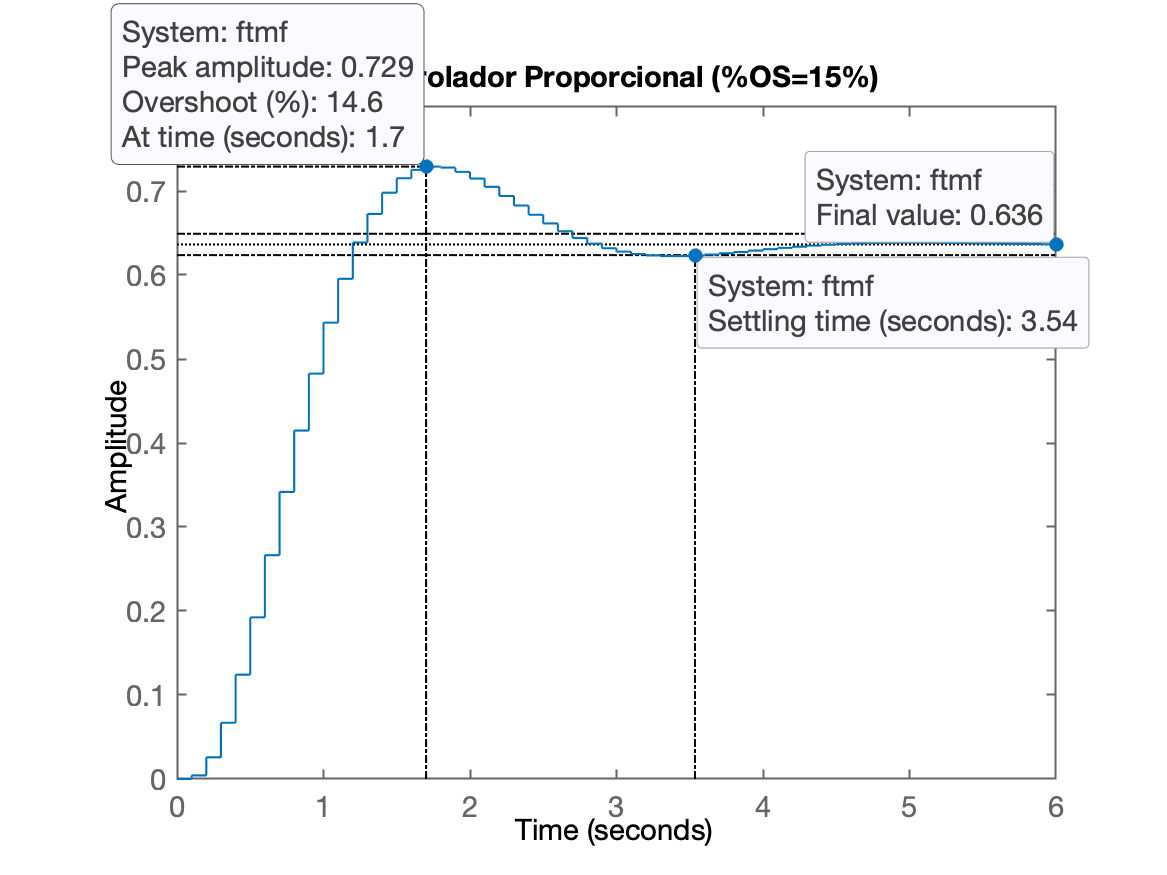
Percebemos que erro diminuiu:
xxxxxxxxxxerro=((1-dcgain(ftmf))/1)*100erro = 36.3636Questão: - Este erro é aceitável?
xxxxxxxxxx>> stepinfo(ftmf) RiseTime: 0.8000 SettlingTime: 3.6000 SettlingMin: 0.5955 SettlingMax: 0.7290 % <-- Note o valor máximo de y[kT]! Overshoot: 14.5639 Undershoot: 0 Peak: 0.7290 PeakTime: 1.7000Repare que o é em relação à e não em relação à (degrau unitário).
Isto quer dizer que podemos aumentar o ganho para forçar , o que corresponde à 15% de overshoot em relação à entrada degrau.
Fica mais fácil encontrar este valor usando o App Control System Designer:
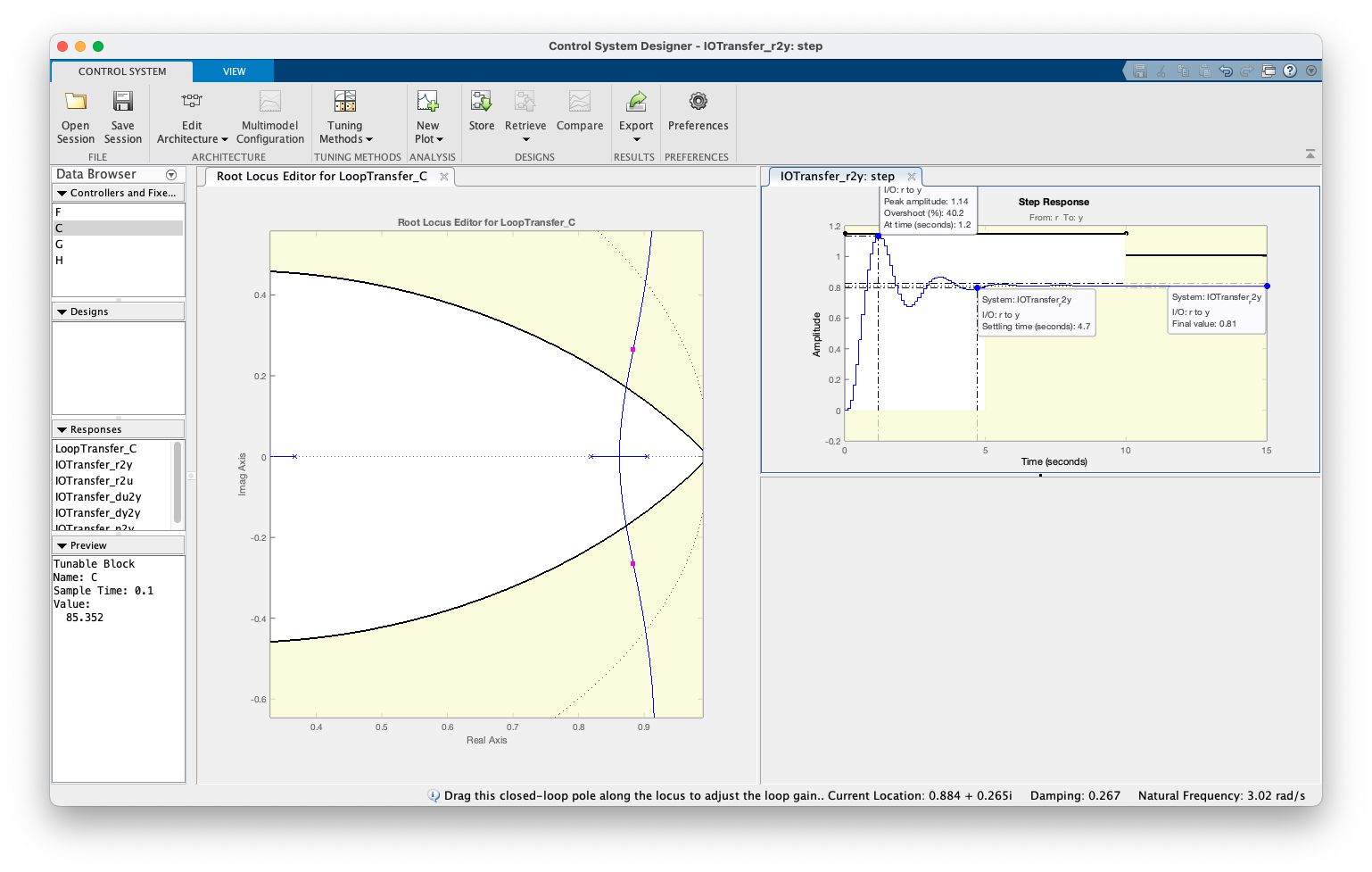
xxxxxxxxxx>> K=86; % valor de ganho descoberto com auxílio do App Control System Designer>> ftmf=feedback(K*BoG, 1);>> figure; step(ftmf)>> title('Controlador Proporcional (%OS=15% para r[\infty])')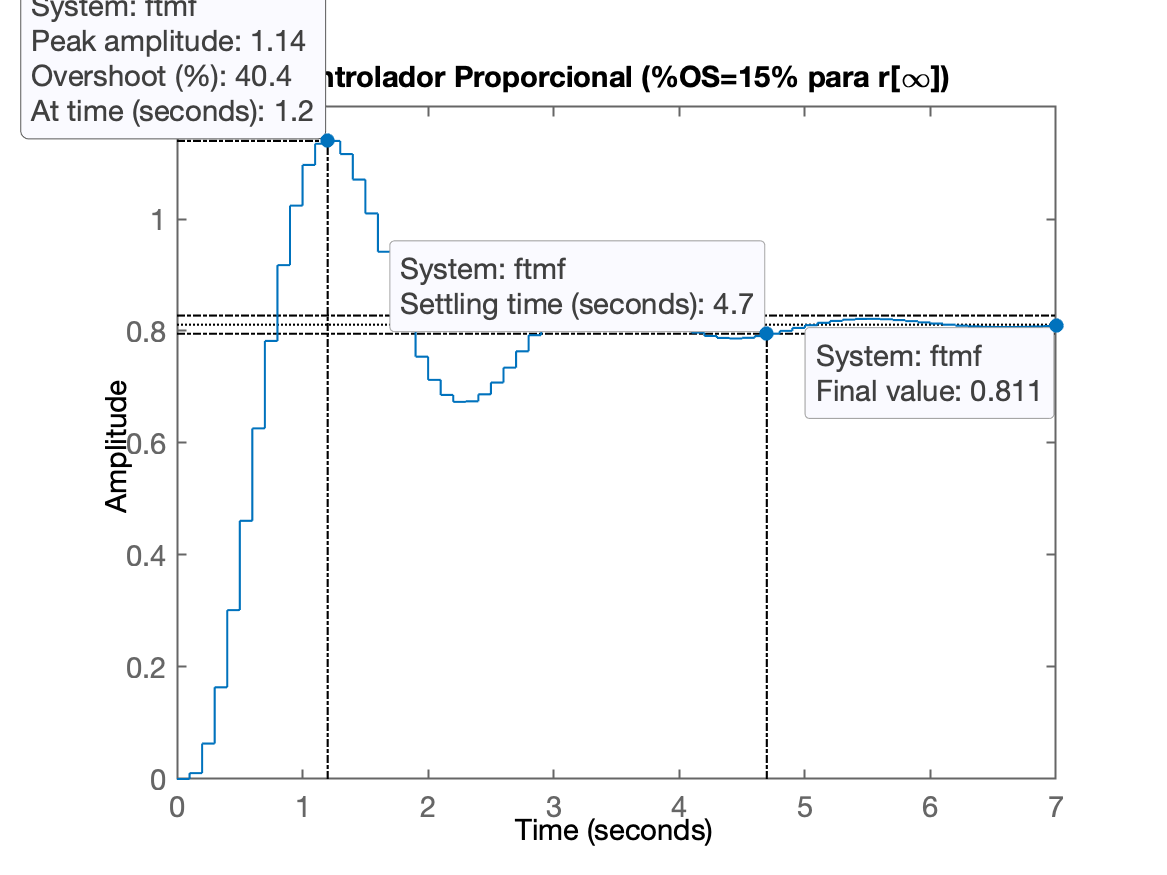
O erro agora fica:
xxxxxxxxxx>> erro=((1-dcgain(ftmf))/1)*100erro = 18.8679Questão: - E se o requisito de controle fosse manter erro de regime permanente abaixo de 10%?
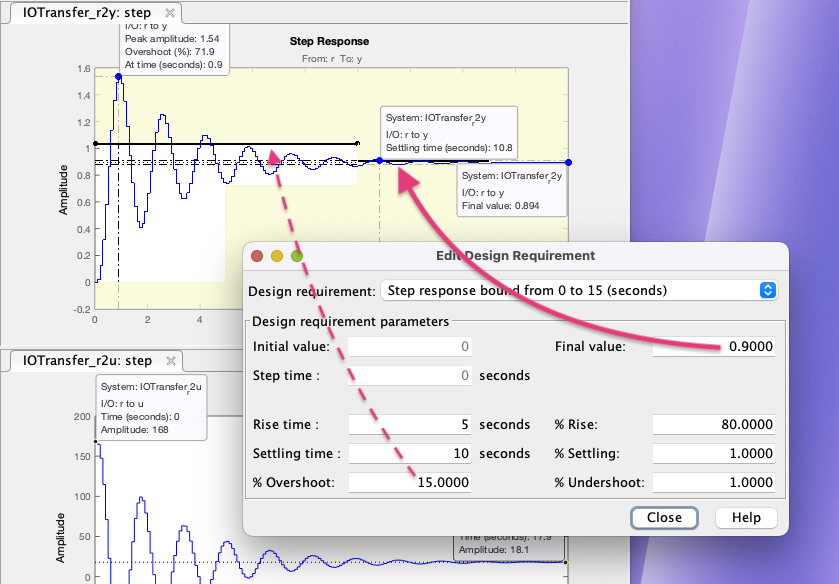
Com auxílio do App Control System Designer descobrimos que neste caso, necessitamos aumentar até o valor aproximado de 170, o que leva a resposta:
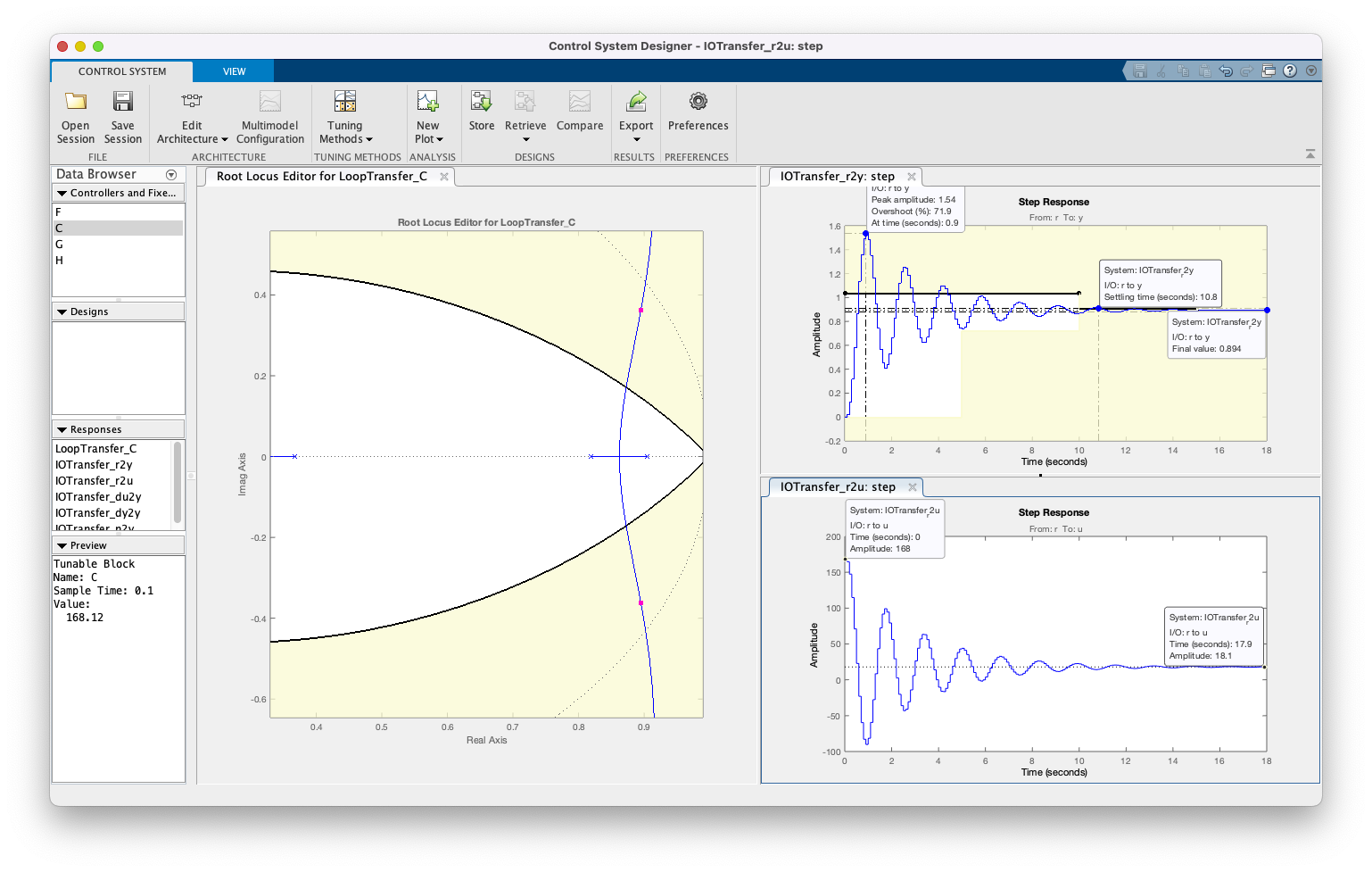
Obs.: Na figura anterior, é possível se estabelecer uma linha guia para (erro de 10%), clicando com o botão direito do mouse sobre a região "branca" da janela 'Step Response', e selecionando-se: "Design Requirements > Edit" e definindo Final value em 0,9:
Próxima aula: usar Teoria do Erro para descobrir que valor deveria ser adotado para de forma a fazer .
Finalizando a seção de trabalho atual:
xxxxxxxxxx>> save dados>> diary offFernando Passold, em 31/03/2025]