Projeto de PID
Recuperando dados das aulas passadas:
xxxxxxxxxx>> load planta>> zpk(BoG) 0.00012224 (z+2.747) (z+0.1903) -------------------------------- (z-0.9048) (z-0.8187) (z-0.3679) Sample time: 0.1 secondsDiscrete-time zero/pole/gain model.>> zpk(G) 1 ------------------ (s+10) (s+2) (s+1) Continuous-time zero/pole/gain model.>>Para descobrir de forma rápida o Ultimate Gain, que poderia ser adotado nesta planta, podemos apelar para o gráfico do Root-Locus:
xxxxxxxxxx>> rlocus(BoG)>> axis([0 1.1 -0.2 1.1]) % zoom na região de interesseE obtemos o gráfico:
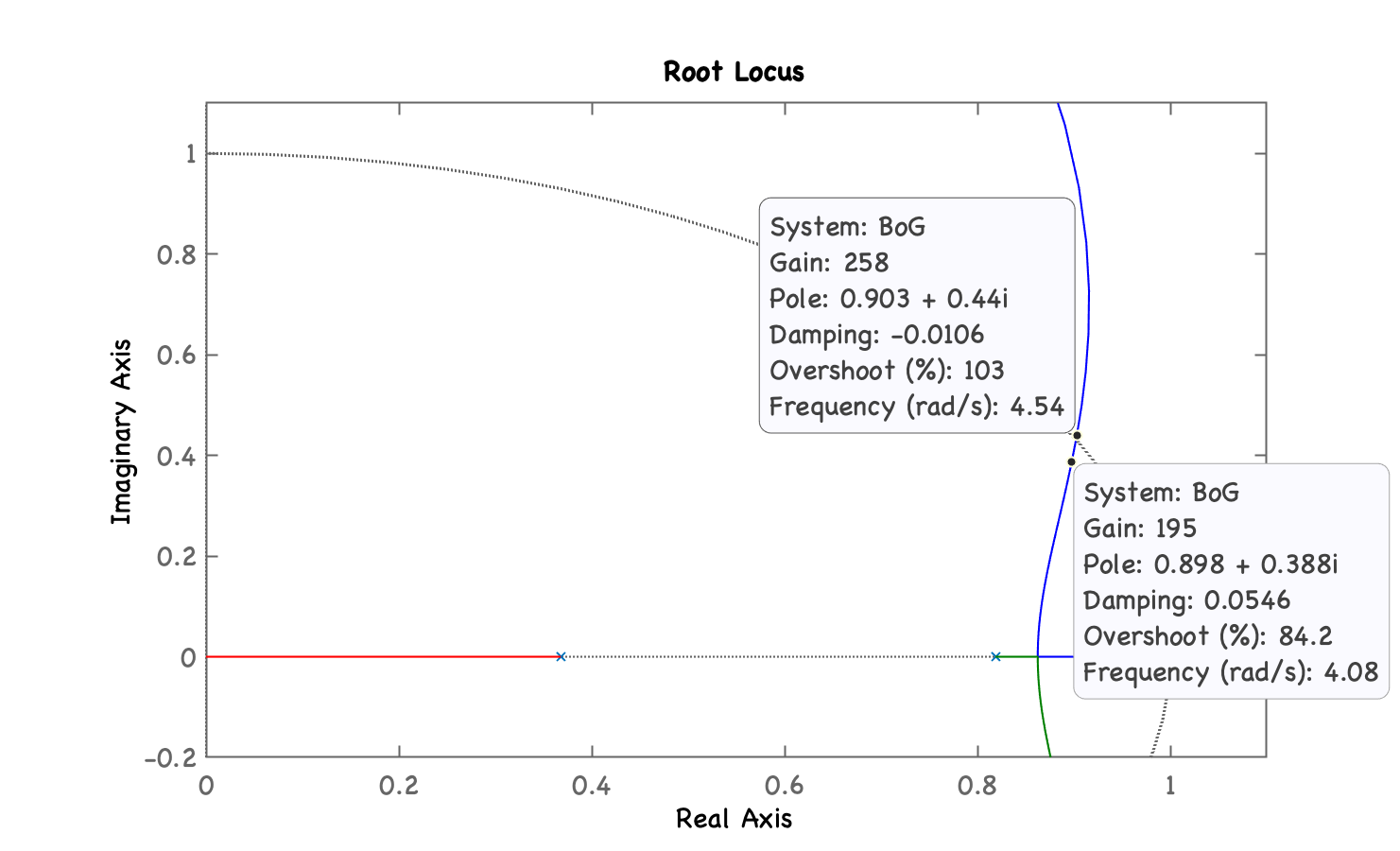
O Ultimate gain fica em: . Temos que agora, ir variando o valor do ganho proporcional dentro desta faixa para descobrir por tentativa e erro (sem usar o método de Yuri), um bom valor para .
Tentando descobrir o valor de ...
xxxxxxxxxx>> Ku=246;>> ftmf_Ku=feedback(Ku*BoG,1);>> figure; step(ftmf_Ku)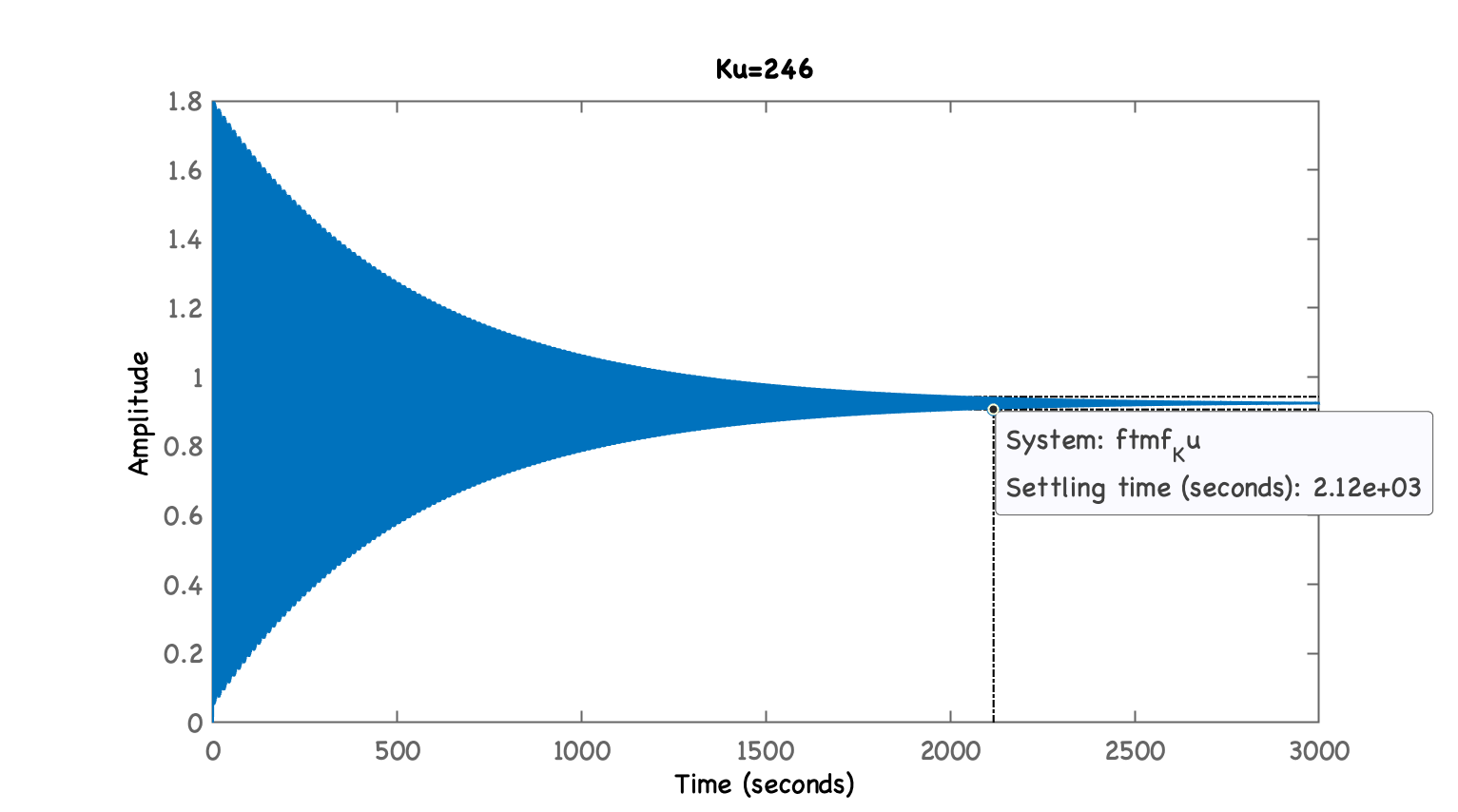
xxxxxxxxxx>> Ku=246.5;>> ftmf_Ku=feedback(Ku*BoG,1);>> figure; step(ftmf_Ku)>> title('Ku = 246.5')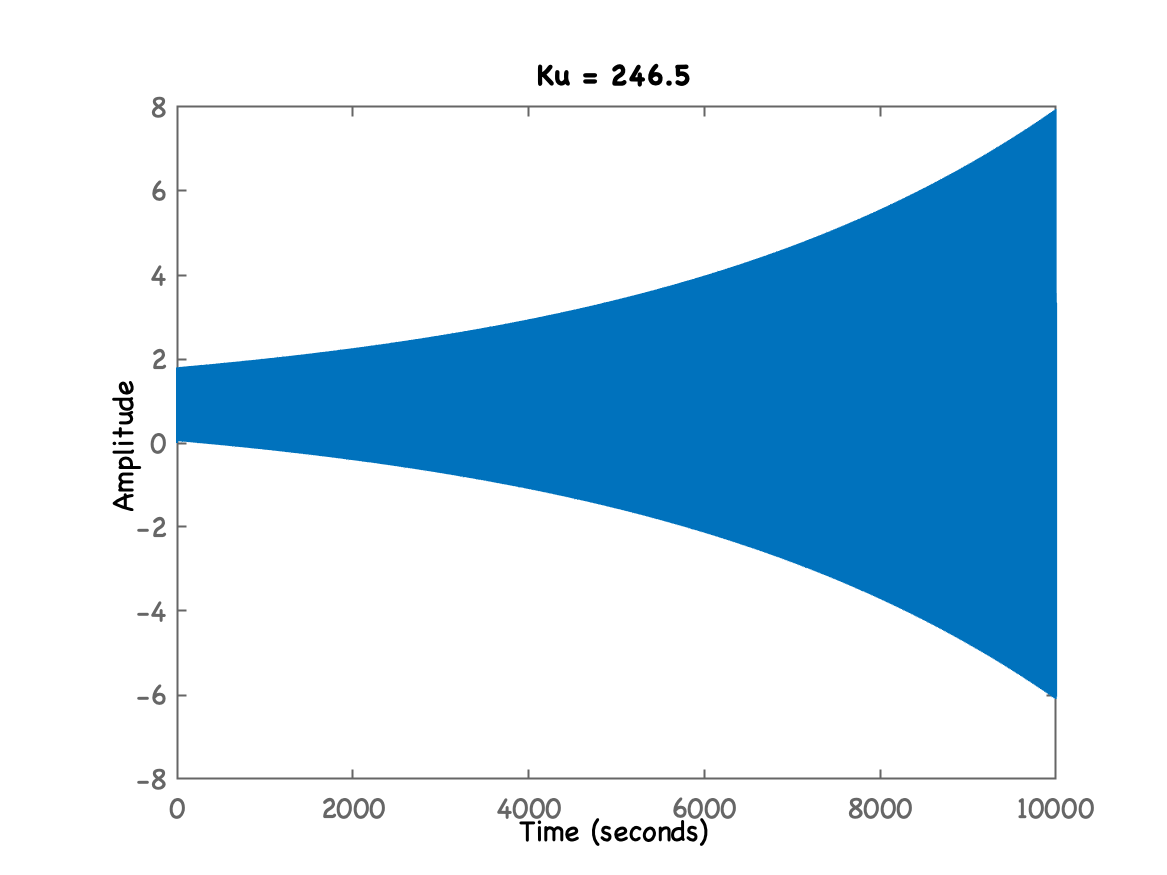
Realizando "zoom" no gráfico anterior para inferir o valor de (período de oscilação).
xxxxxxxxxx>> axis([355 385 -0.1 2.1])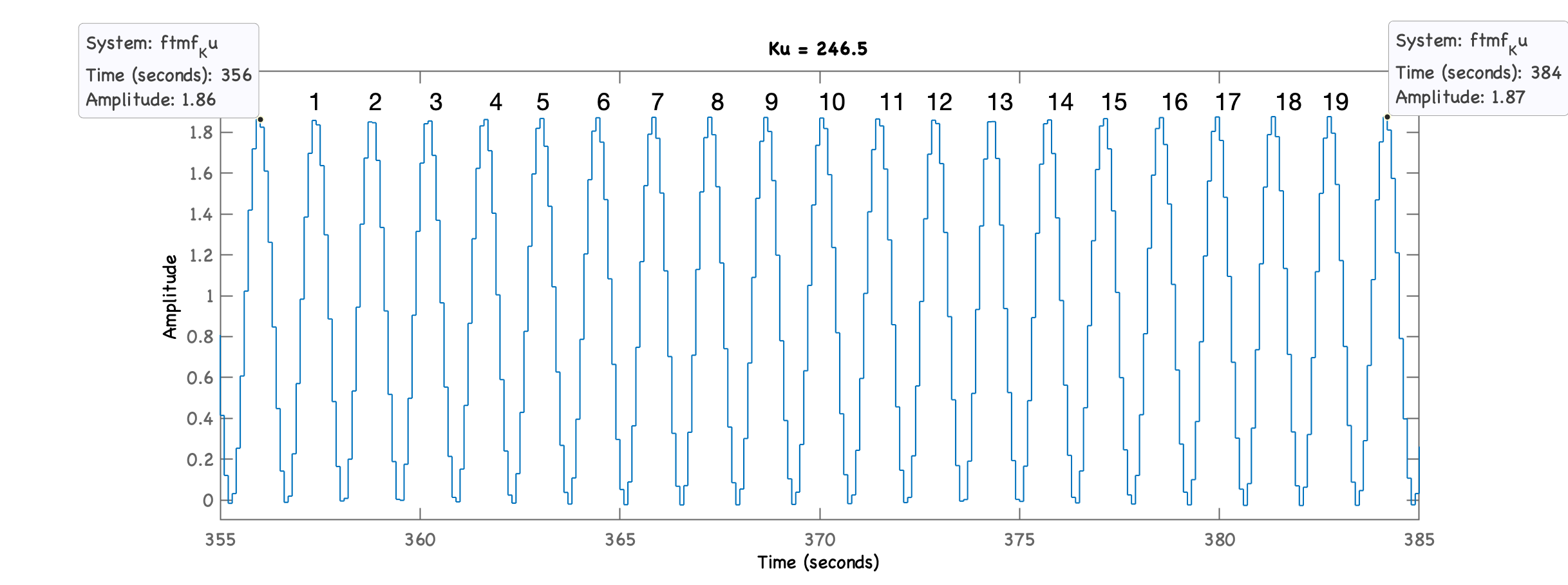
Do gráfico anterior:
xxxxxxxxxx>> Tu=(384-356)/20Tu = 1.4Entrando numa tabela de Ziegler-Nichols, ZH: "classic PID", à partir de: https://en.wikipedia.org/wiki/Ziegler–Nichols_method e supondo PID na arquitetura paralela:
xxxxxxxxxx>>Kp=0.6*KuKp = 147.9>> Ki=1.2*Ku/TuKi = 211.29>> Kd=0.075*Ku*TuKd = 25.883Simulando o PID usando Simulink:

Arquivo: PID_paralelo.slx.r2019b ou PID_paralelo.mdl.
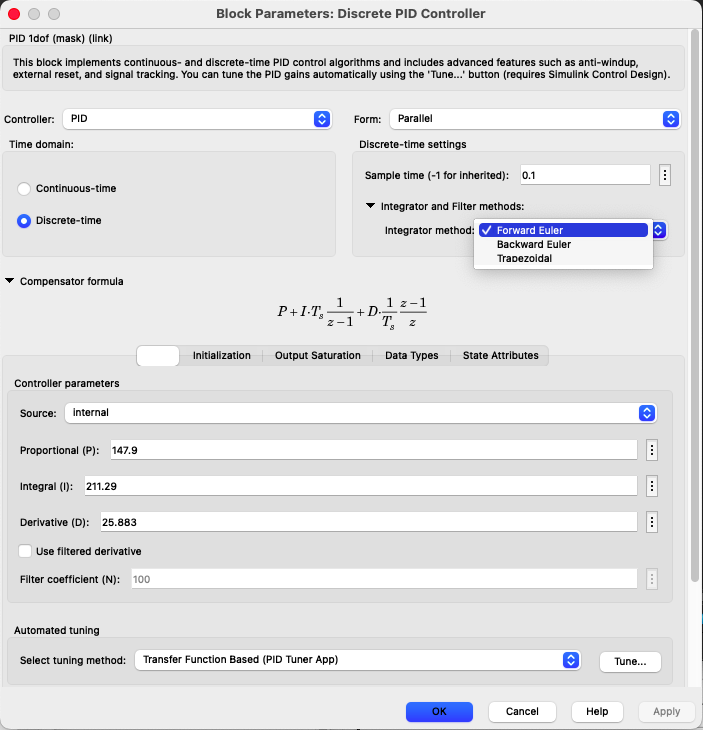
A eq. do PID Discreto do Matlab/Simulink é:
Separando a ação integral teríamos:
reescrevendo na notação de expoentes negativos em teremos:
então concluímos que este já corresponde ao ganho para ação integral na versão discreta do PID. Notar que a própria eq. da ação integral já contempla o termo para calculo da área (neste caso, integração retangular).
Já a ação derivativa corresponde à:
note que:
E assim, de forma similar ao que ocorre com a ação integral, a parte da equação relacionada com a ação derivativa já leva em conta o período de amostragem .
Sendo assim, os ganho que devem ser adotados para este PID (ciciar sobre o bloco PID Discrete para abrir a caixa de Propriedades):
Simulando o sistema com estes valores obtermos a seguinte resposta:
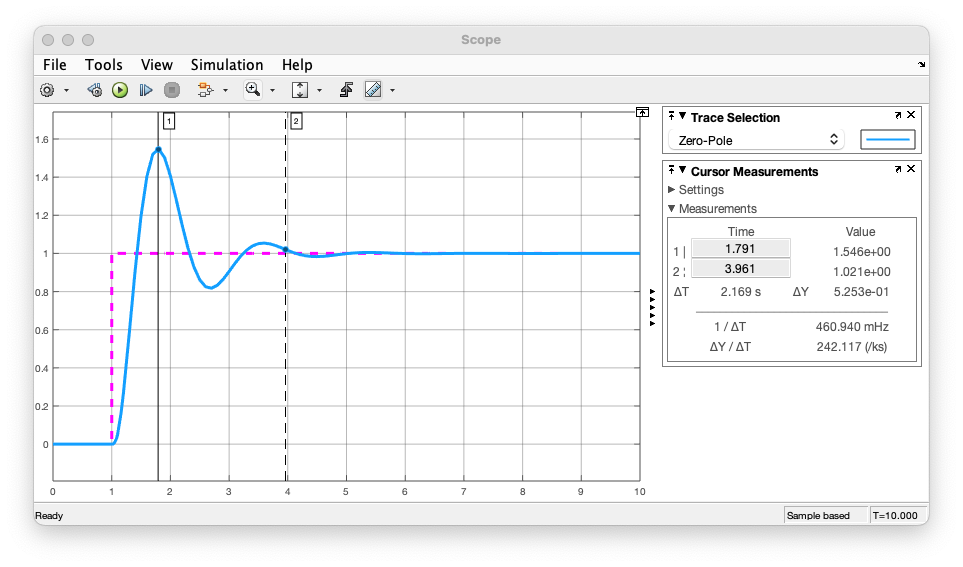
E então percebemos um (em ) e um segundos (lembrar que o degrau iniciou no instante segundo).
Percebe-se que falta realizar uma sintonia fina sobre estes valores iniciais para os parâmetros no PID.
Se forem usados os valores:
obtemos a seguinte resposta:
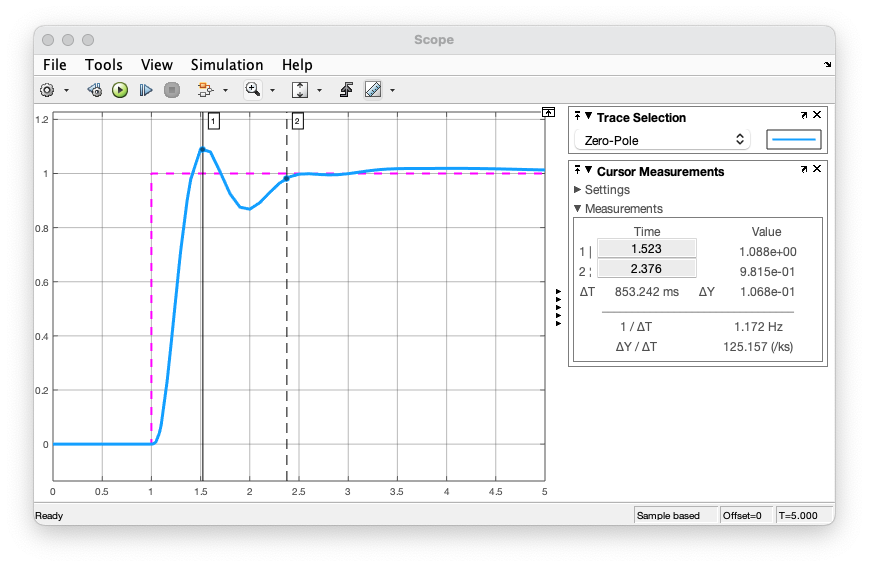
E agora obtermos melhores resultados: (em ) e .
Fim