
Projeto de PD
Arquivo fonte (diary):
aula_PD_03out2019.txt
Embasamento teórico --> Arquivo PDF: Root_Locus_Cap_9_parte_2_ptbr.pdf
Exemplo_1
Planta:
Controlador PD, formato genérico:
ou seu formato genérico:
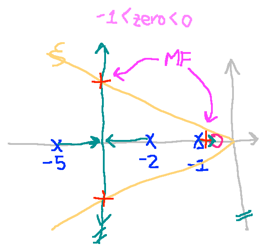
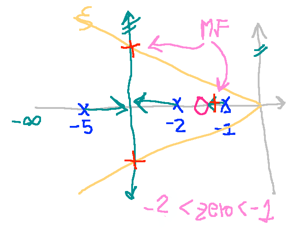
-- Dúvida: onde alocar o zero do PD !?
Considerando opções e traçando esboços à mão dos respectivos RL’s:
| Caso 1 | Caso 2 |
|---|---|
 |
 |
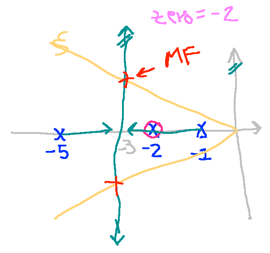
| Caso 3: | Caso 4 |
 |
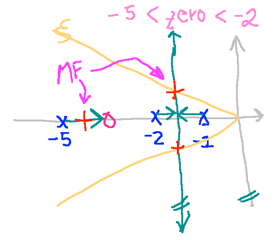 |
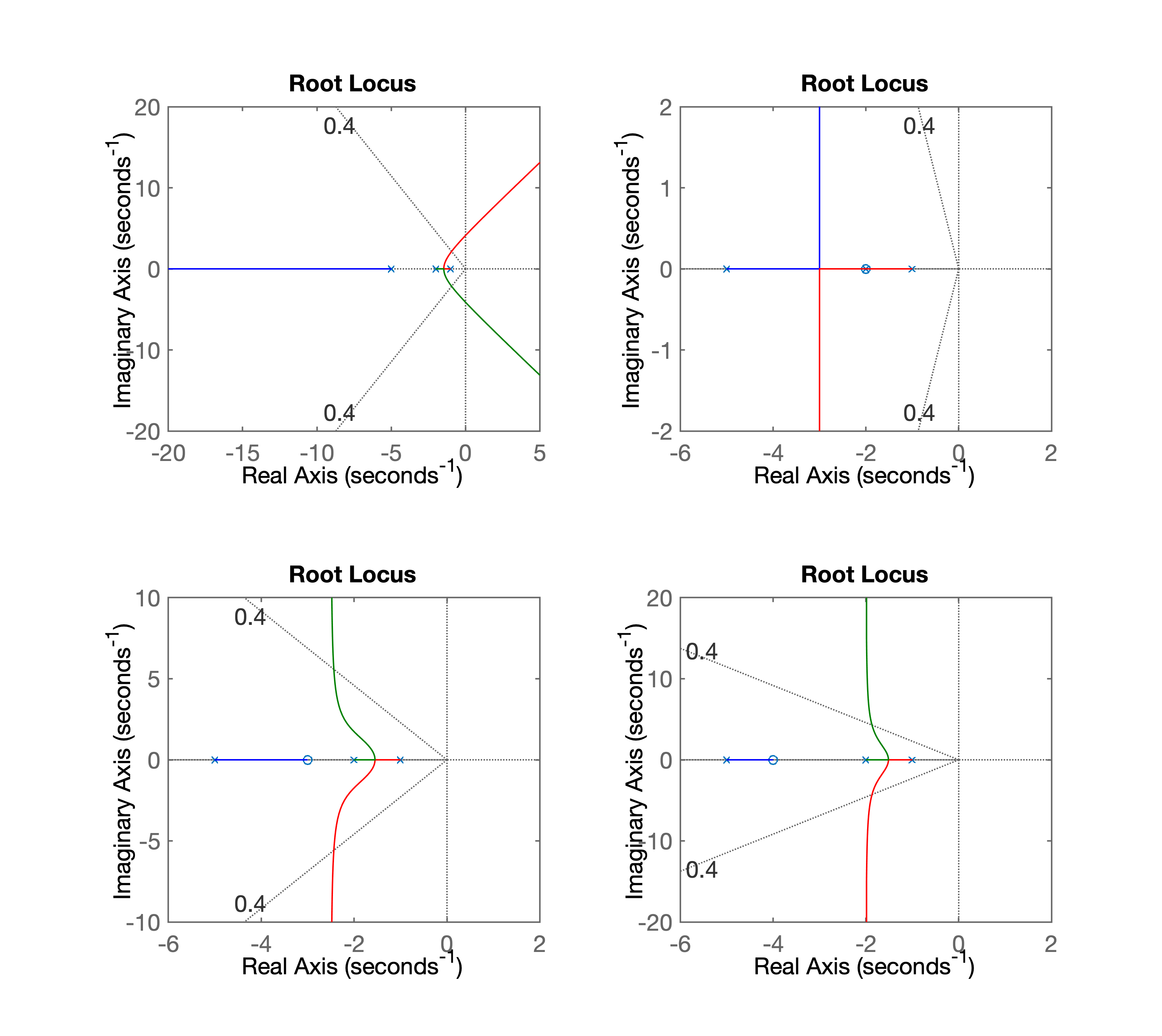
Observando-se as figuras acima, percebe-se que o caso 3 (zero em ) é o único que reduz o sistema para um de 2a-ordem, com parte real dos polos de MF o mais distante possível do eixo (em comparação aos outros casos).
Opções seguindo livro do NISE e levantando os gráficos de RL usando Matlab:
- Zero em ;
- Zero em ;
- Zero em .
Avaliando as opções:
>> % entrando com a planta
>> G=tf(1, poly( [-1 -2 -5] ) );
>> zpk(G)
1
-----------------
(s+5) (s+2) (s+1)
Continuous-time zero/pole/gain model.
>> % Ingressando com PDs
>> PD1=tf([1 2],1)
PD1 =
s + 2
Continuous-time transfer function.
>> PD2=tf([1 3],1);
>> PD3=tf([1 4],1);
>> PD4=tf([1 7],1);
>> ftma_PD1=PD1*G;
>> ftma_PD2=PD2*G;
>> ftma_PD3=PD3*G;
>> ftma_PD4=PD4*G;
>> ftma=G; % Puro controlador proporcional
>> subplot(2,2,1); rlocus(ftma);
>> sgrid(0.4, 0)
>> subplot(2,2,2); rlocus(ftma_PD1); sgrid(0.4, 0)
>> subplot(2,2,3); rlocus(ftma_PD2); sgrid(0.4, 0)
>> subplot(2,2,4); rlocus(ftma_PD3); sgrid(0.4, 0)
% [compara_PDs.png](RL para as diferentes opções:
Exemplo_2
Seja a planta:
Note que esta planta é um sistema do tipo 1 (com um integrador), o que já garante erro nulo em regime permanente para entrada degrau.
O objetivo é projetar um PD capaz de: e reduzir em em comparação à um controlador proporcional.
Solução:
>> % Iniciando pelo projeto do Controlador Proporcional
>> G=tf(1,poly([0 -4 -6]));
>>zpk(G)
ans =
1
-------------
s (s+6) (s+4)
Continuous-time zero/pole/gain model.
>> OS=16; % $\%OS \le 16\%$
>> zeta=(-log(OS/100))/(sqrt(pi*pi+(log(OS/100))^2))
zeta =
0.5039
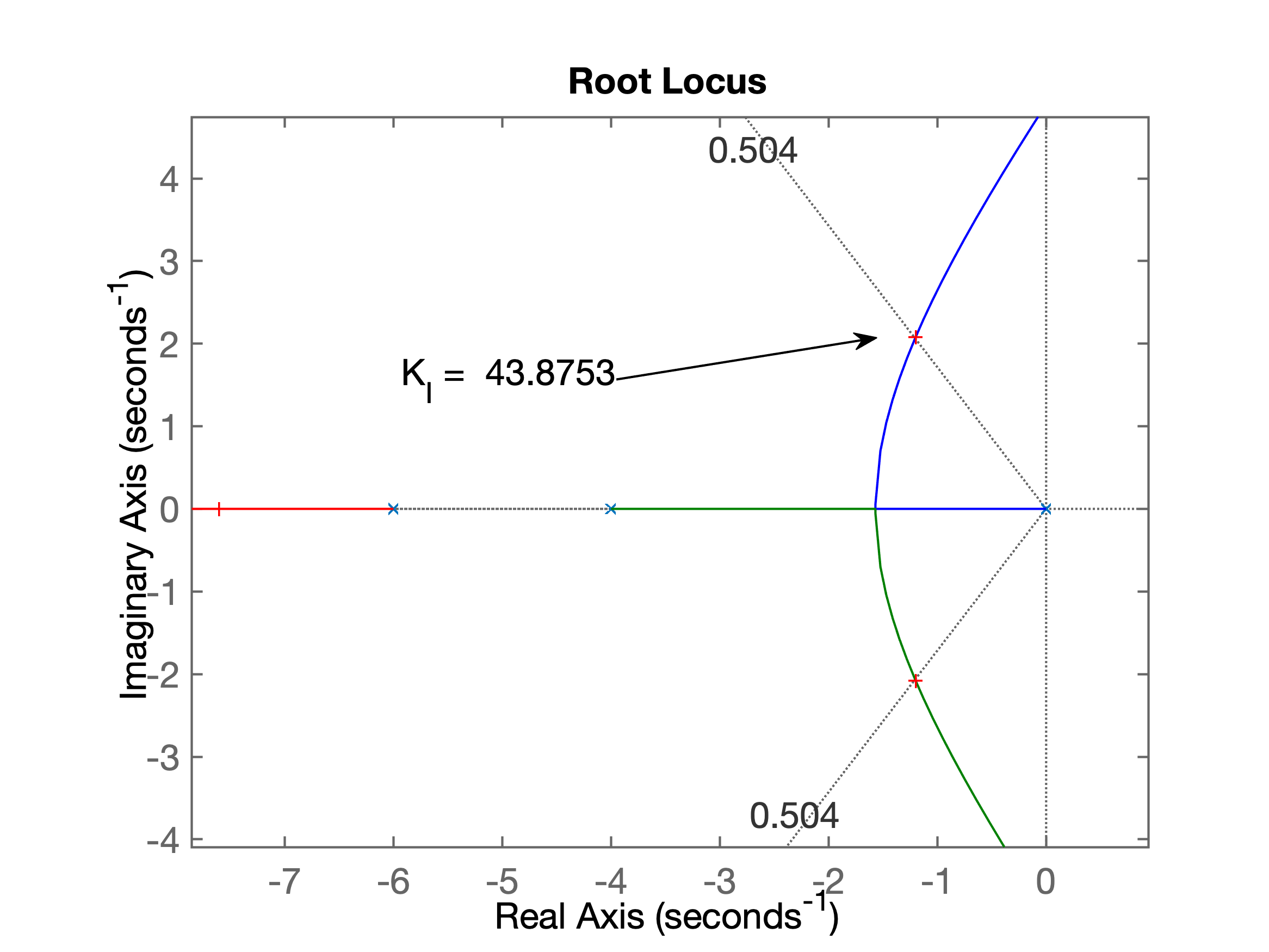
>> % Sintonizando o Integrador, para descobrir ts
>> ftma_I=G;
>> figure; rlocus(ftma_I)
>> hold on;
>> sgrid(zeta,0)
>> [K_I,polosMF]=rlocfind(ftma_I)
Select a point in the graphics window
selected_point =
-1.1912 + 2.0793i
K_I =
43.8753
polosMF =
-7.6022 + 0.0000i
-1.1989 + 2.0818i
-1.1989 - 2.0818i
>> % RL saldo como: RL_Integrador_exemplo_PD.png
>> % [RL_Integrador_exemplo_PD.png](RL_Integrador_exemplo_PD.png)
% fechando a malha para descobrir ts
ftmf_I=feedback(K_I*RL para o Integrador:
Fechando malha do Integrador para descobrir original:
>> % fechando a malha para descobrir ts
>> ftmf_I=feedback(K_I*ftma_I, 1);
>> figure; step(ftmf_I)
>> grid
>> % Gráfico salvo como: step_integrador_exemplo_PD.png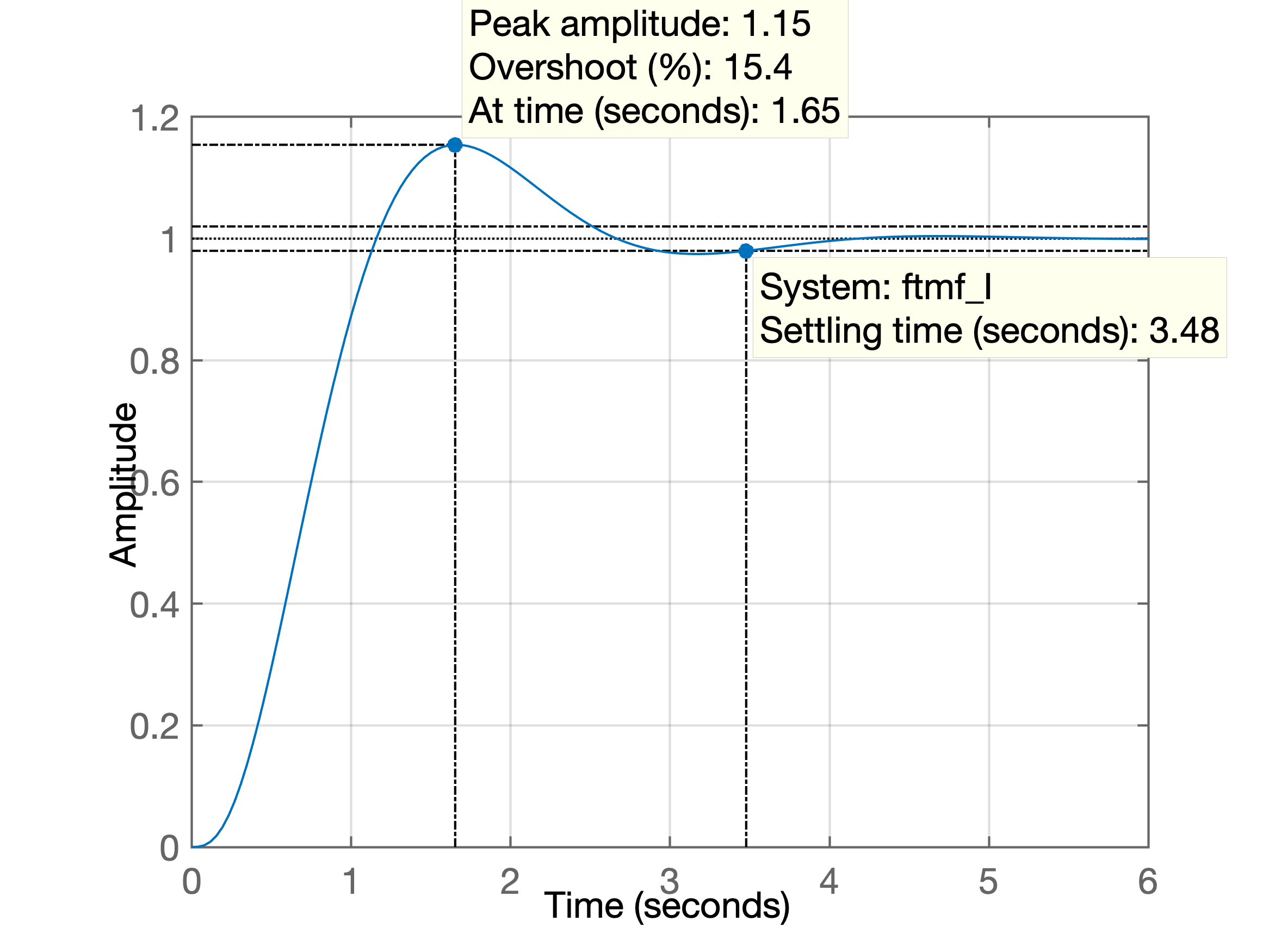
Finalmente se descobre que:
>> ts=3.48;
>> ts_d=3.5/3
>> ts_d =
1.1667
>> save planta_PD % opcionalControlador PD, formato genérico:
ou seu formato genérico:
Incógnita: -- onde posicionar o zero deste controlador?
Resposta: descobrindo usando contribuição angular...
Método manual:
>> sigma=4/ts_d
sigma =
3.4286
>> wn=4/(zeta*ts_d)
wn =
6.8045
>> wd=wn*sqrt(1-zeta^2)
wd =
5.8776
>> polos_MFd=[-sigma+i*wd -sigma-i*wd]
polos_MFd =
-3.4286 + 5.8776i -3.4286 - 5.8776i
>> % verificando onde os pólos desejados de MF se
>> % encontraram no plano-s
>> figure; rlocus(ftma_I);
>> hold on;
>> sgrid(zeta,wn)
>> plot(polos_MFd, 'b+');
>> plot(polos_MFd, 'b+', 'MarkerSize',18);
>> th_p1=atan2(wd,-sigma)
th_p1 =
2.0989
>> th_p1*180/pi % resposta em graus (e não em radianos)
ans =
120.2562
>> th_p2 = atan2(wd,4 - sigma)
th_p2 =
1.4739
>> th_p2*180/pi
ans =
84.4471
>> th_p3 = atan2(wd,6 - sigma)
th_p3 =
1.1584
>> th_p3*180/pi
ans =
66.3708
>> sum_th_p=th_p1+th_p2+th_p3
sum_th_p =
4.7311
>> sum_th_p*180/pi
ans =
271.0741
>> th_z = sum_th_p - pi
th_z =
1.5895
>> th_z*180/pi
ans =
91.0741
>> zero = sigma - wd/tan(th_z)
zero =
3.5388
>> PD=tf([1 zero], 1)
PD =
s + 3.539
Continuous-time transfer function.
>> ftma_PD=PD*ftma_I;
>> zpk(ftma_PD)
ans =
(s+3.539)
-------------
s (s+6) (s+4)
Continuous-time zero/pole/gain model.
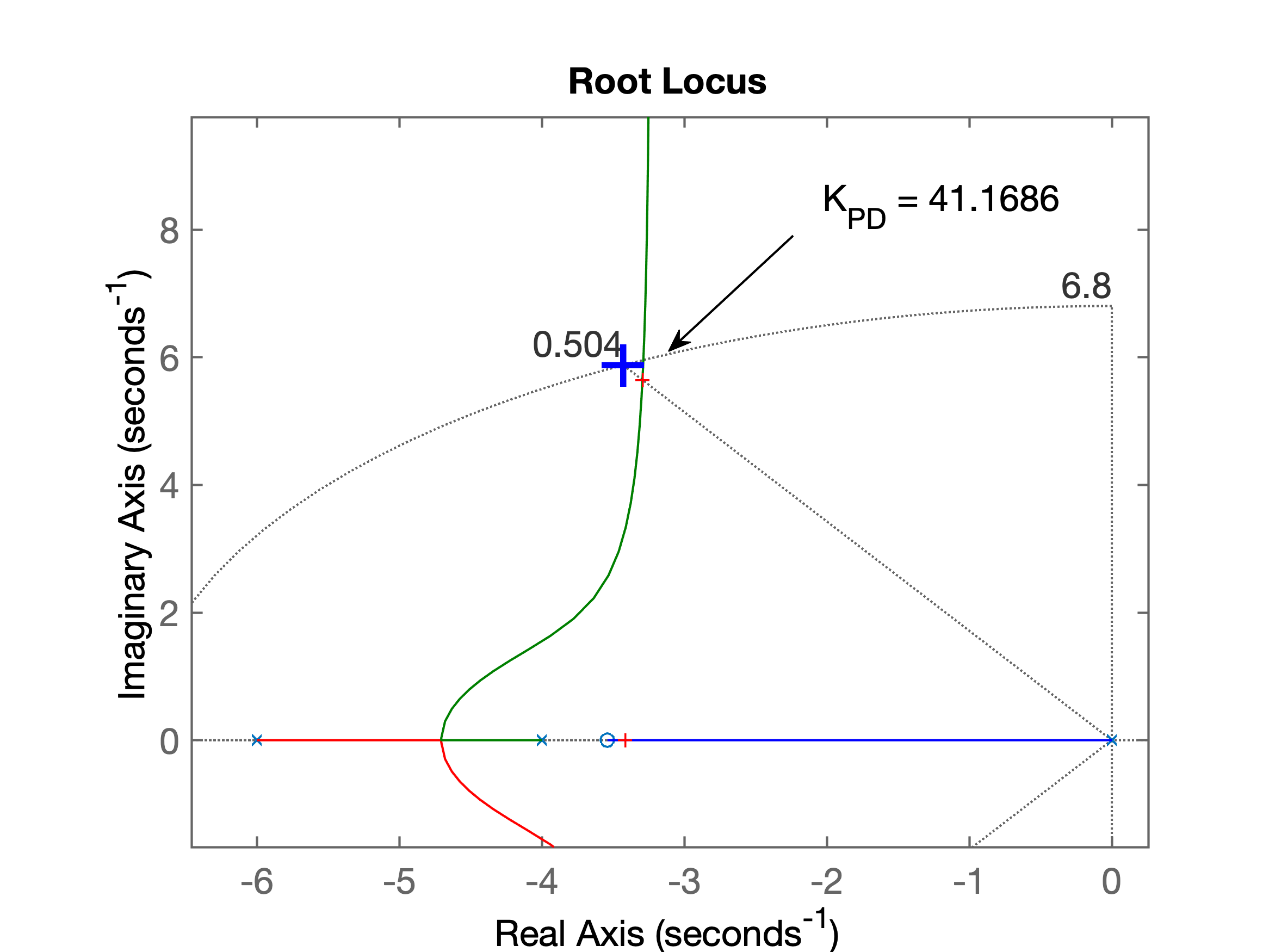
>> figure; rlocus(ftma_PD)
>> hold on
>> sgrid(zeta,wn)
>> plot(polos_MFd, 'b+', 'MarkerSize',18, 'LineWidth', 3);
>> [K_PD,polosMF]=rlocfind(ftma_PD)
Select a point in the graphics window
selected_point =
-3.3102 + 5.6431i
K_PD =
41.1686
polosMF =
-3.2936 + 5.6427i
-3.2936 - 5.6427i
-3.4128 + 0.0000i
>> ftmf_PD=feedback(K_PD*ftma_PD, 1);
>> figure;
>> step(ftmf_PD)
>> % Gráfico da resposta salvo como: step_PD.png
>> % Gráfico do RL do PD salvo como: RL_PD.png
>> save planta_PDRL final:
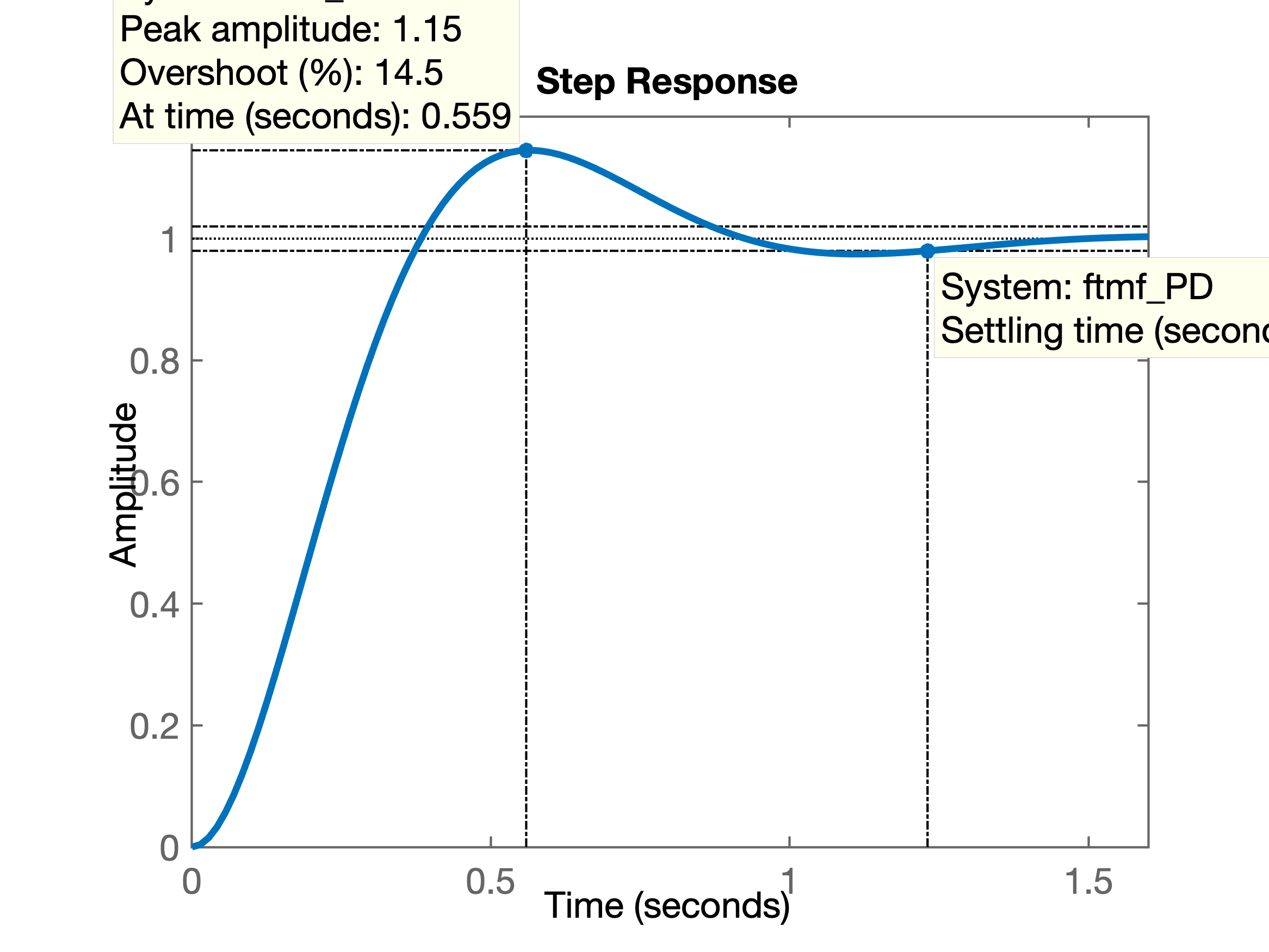
Resposta ao degrau unitário:
Usando o script: [find_polo_zero.m]
>> help find_polo_zero
find_polo_zero.m
Rotina de contribuição angular para descobrir onde
localizar pólo ou zero dependendo do local desejado para
os pólos de MF
Uso:
Esta rotina já espera uma tf de nome "ftma_aux"
onde: ftma_aux(s)=C(s)*G(s);
e onde: C(s) está parcialmente fornecido, ou já contendo
zero(s) ou já contendo pólo(s)
A rotina pergunta durante a execução se a idéia é
determinar o local de um zero ou de um pólo
Fernando Passold, em 14/10/2020, 20/10/2020
>> ftma_aux=G;
>> find_polo_zero
Overshoot desejado (em %): ? 16
ts_d (desired settling time): ? 1.1667
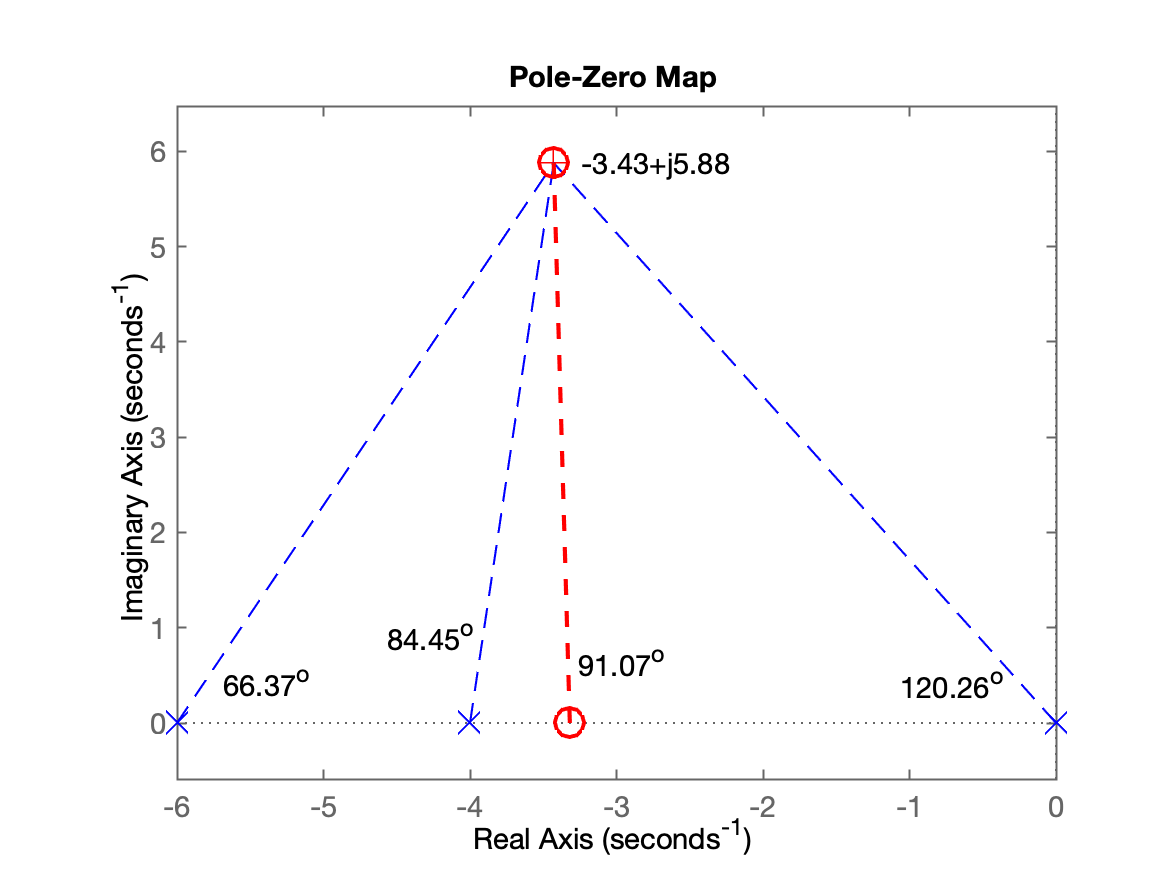
Pólos (desejados) de MF em: s = -3.42847 \pm j 5.87743
Calculando ângulos dos Pólos:
Pólo 1 em s= 0 --> Ângulo: 120.256^o
Pólo 2 em s= -6 --> Ângulo: 66.3694^o
Pólo 3 em s= -4 --> Ângulo: 84.446^o
Soma ângulos dos pólos: 271.072^o
Calculando ângulos dos Zeros:
Soma ângulos dos zeros: 0^o
Determinar: [p]=pólo ou [z]=zero do controlador: ? z
Ângulo do zero do controlador: 91.0716^o
O zero do controlador deve estar em s = -3.31854
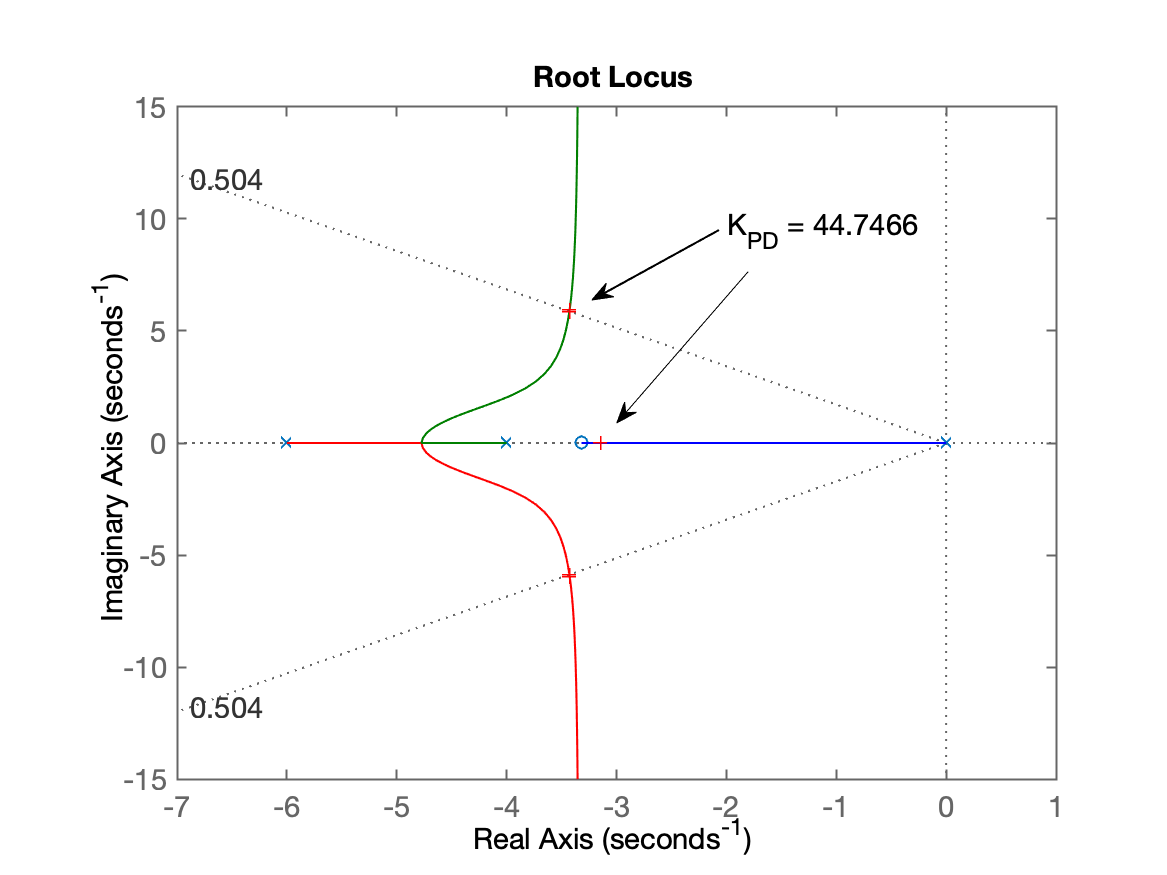
>> | Contribuição angular | RL final |
|---|---|
 |
 |
Finalizando sintonia deste controlador (falta ganho):
>> % Note que variável ftma já contem ftma_aux + zero calculado:
>> zpk(ftma)
ans =
(s+3.319)
-------------
s (s+6) (s+4)
Continuous-time zero/pole/gain model.
>> [K_PD, polosMF] = rlocfind(ftma) % sobre a 2a-figura gerada antes
Select a point in the graphics window
selected_point =
-3.4408 + 5.9535i
K_PD =
44.7466
polosMF =
-3.4263 + 5.9531i
-3.4263 - 5.9531i
-3.1475 + 0.0000i
>> % fechando malha e avaliando resposta ao degrau unitário
>> ftmf_PD=feedback(K_PD*ftma, 1);
>> figure; step(ftmf_PD)
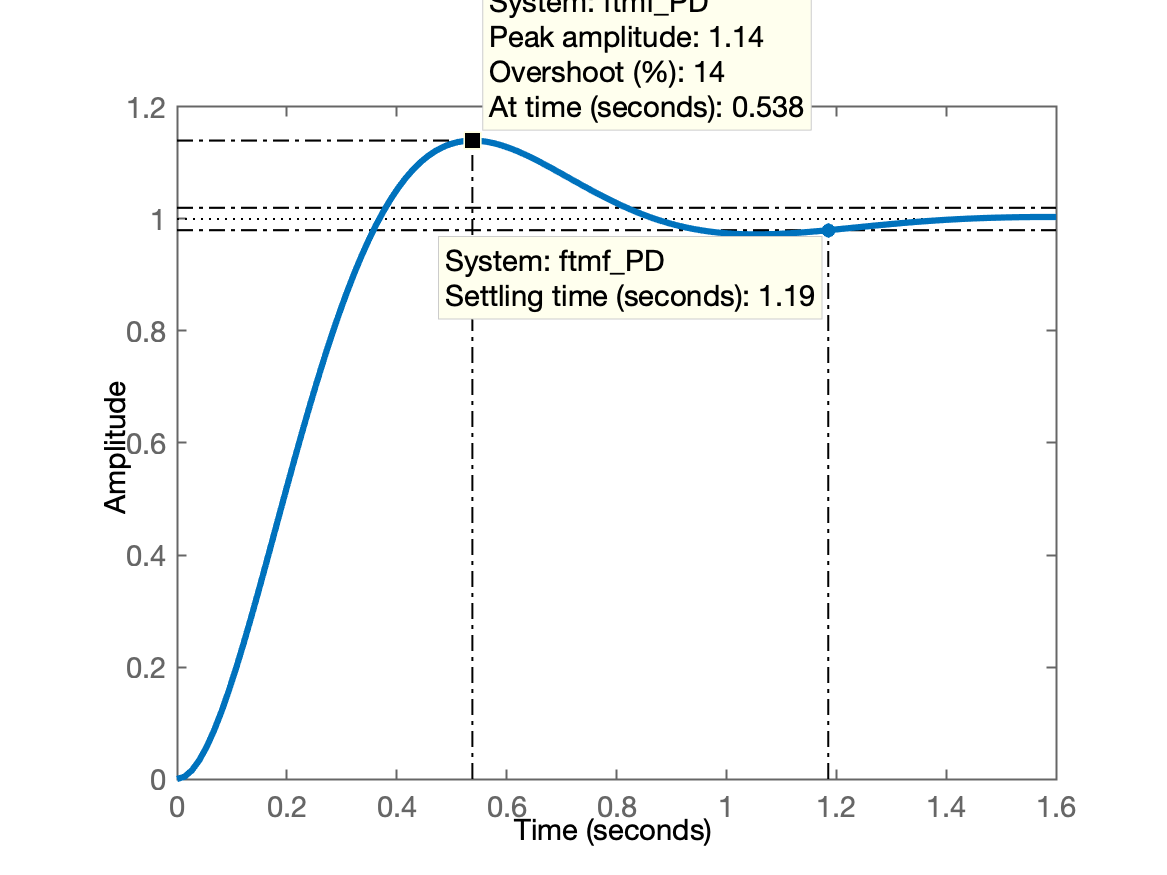
>> stepinfo(ftmf_PD)
ans =
struct with fields:
RiseTime: 0.2487
SettlingTime: 1.1854
SettlingMin: 0.9028
SettlingMax: 1.1401
Overshoot: 14.0121
Undershoot: 0
Peak: 1.1401
PeakTime: 0.5376
>> Resposta ao degrau unitário para este PD:
Comparando controladores
>> figure; step(ftmf_I, ftmf_PD)
>> % Gráfico salvo como: comparando_step_I_PD.png
>> % [comparando_step_I_PD.png](comparando_step_I_PD.png)
>> format compact
>> zpk(ftma_I)
ans =
1
-------------
s (s+6) (s+4)
Continuous-time zero/pole/gain model.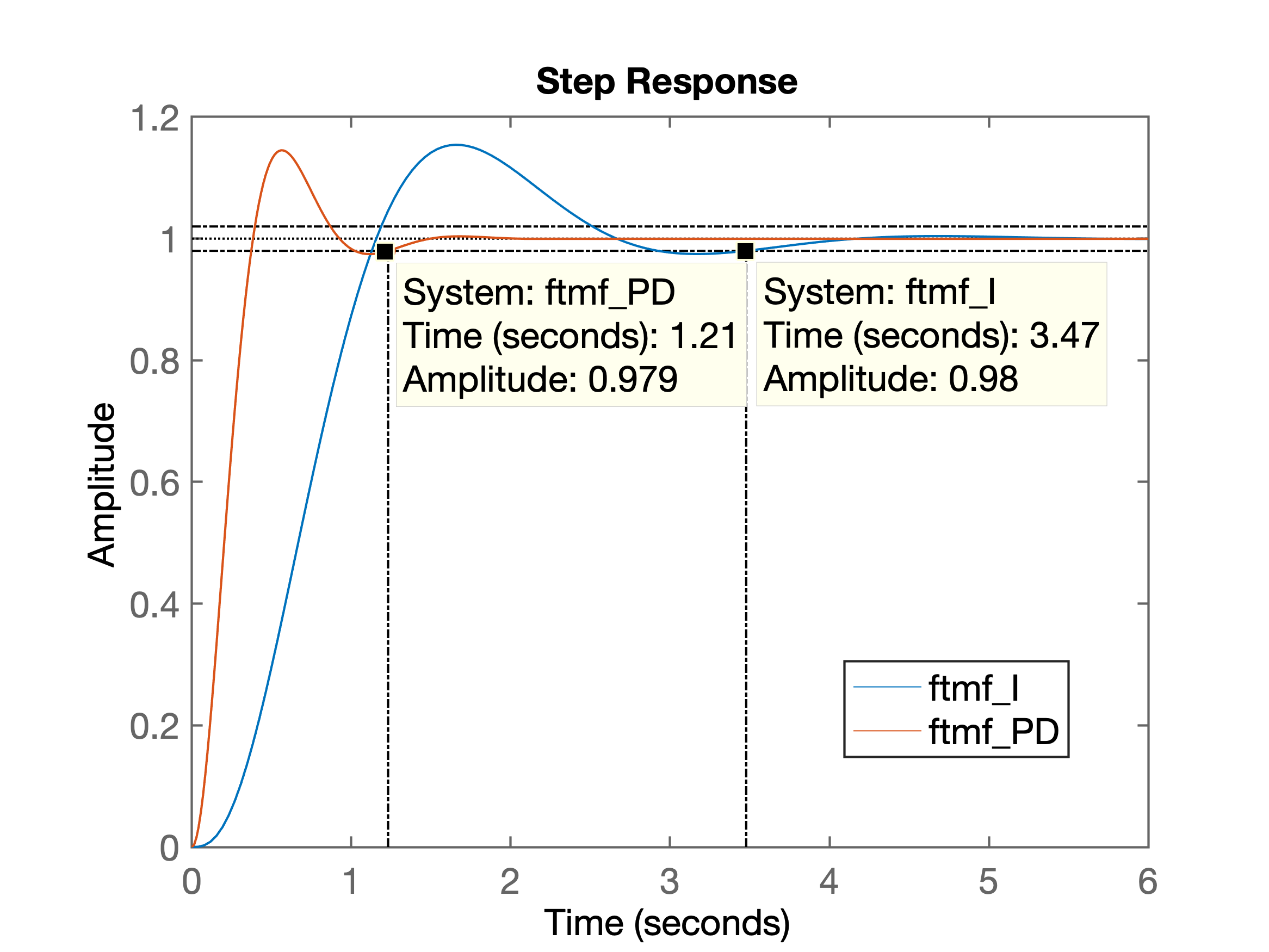
Encerrando atividades no Matlab:
>> save planta_PD
>> diary offArquivo planta_PD.mat disponível [aqui].
Fernando Passold, em 03/10/2019.