Ações Derivativas
Note que um PD é acrescentado num sistema para acelerar o tempo de resposta do mesmo, mas deve ser percebido alguns “efeitos colaterais” da ação Derivativa:
- Expressivas amplitudes para a ação de controle. Os valores gerados na teoria podem ser aplicados na prática?
- Um Derivador possui tendência à amplificar componentes de alta frequencia.
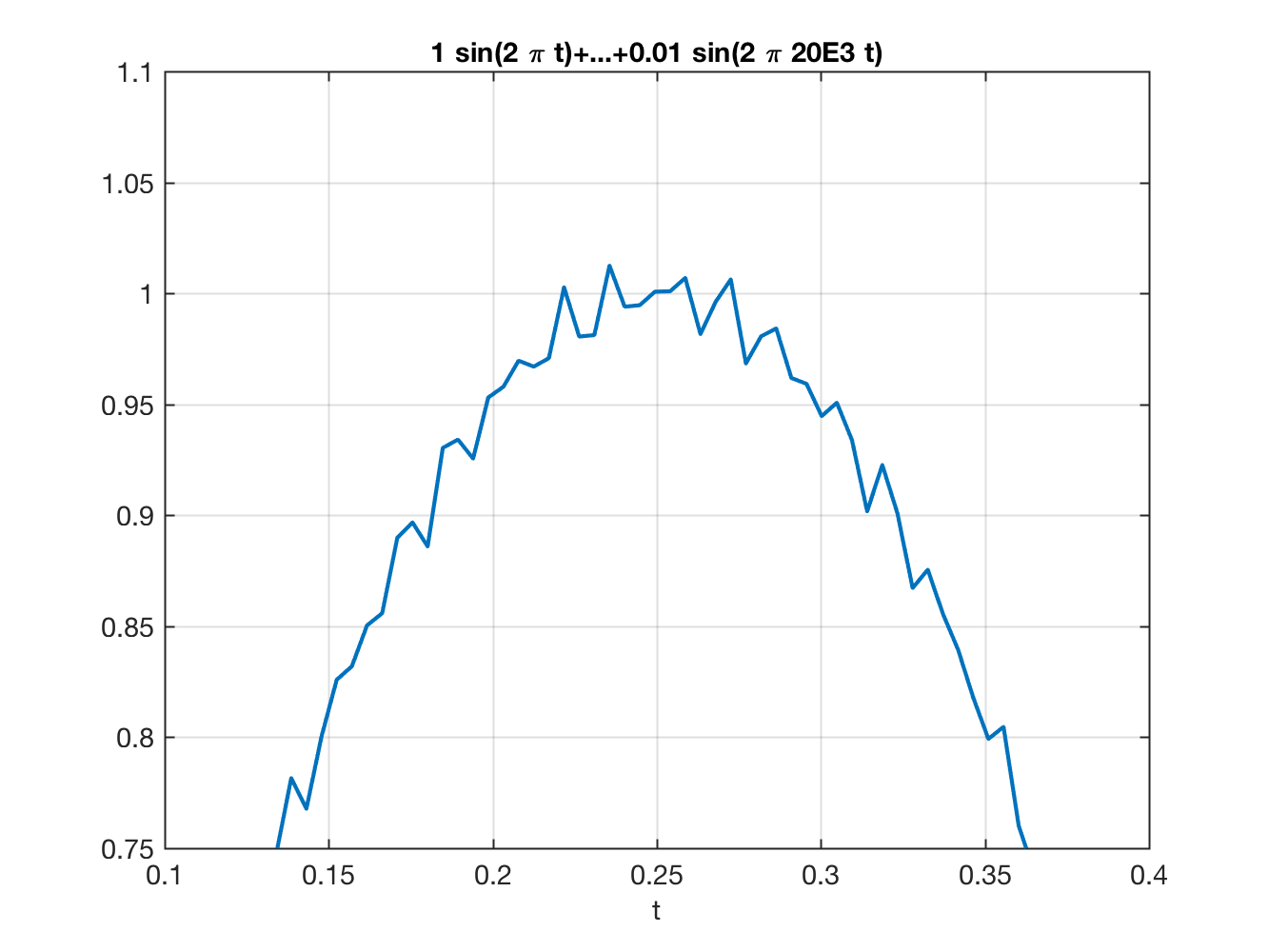
Sobre esta última parte, vamos supor um sinal de referência simples, oscilatório, sobre o qual se apresenta ruídos com amplitude de 1% em relação à amplitude da oscilação original que queremos derivar. Então temos algo como:
note que o sinal original está oscilando com amplide de ; e sobreposto ao mesmo aparece o ruído: um sinal induzido da rede (60 Hz) com amplitude de 1% em relação ao sinal original sinal induzido de uma fonte chapeada na frequência de 20 KHz, mesma amplitude reduzida de 1% em relação ao sinal origina.
O que ocorre com este sinal quando realizamos sua derivada: ?
Por definição termos:
Note que sobre a derivada do sinal original que continua variando entre , temos agora a derivada do ruído da rede, cuja amplitude alcança 60% da amplitude do sinal que queremos derivar; e pior que isto,, há a derivada do ruído da fonte chaveada, cuja amplitude acabaou sendo maior que a própria deriva que gostaríamos de medir.
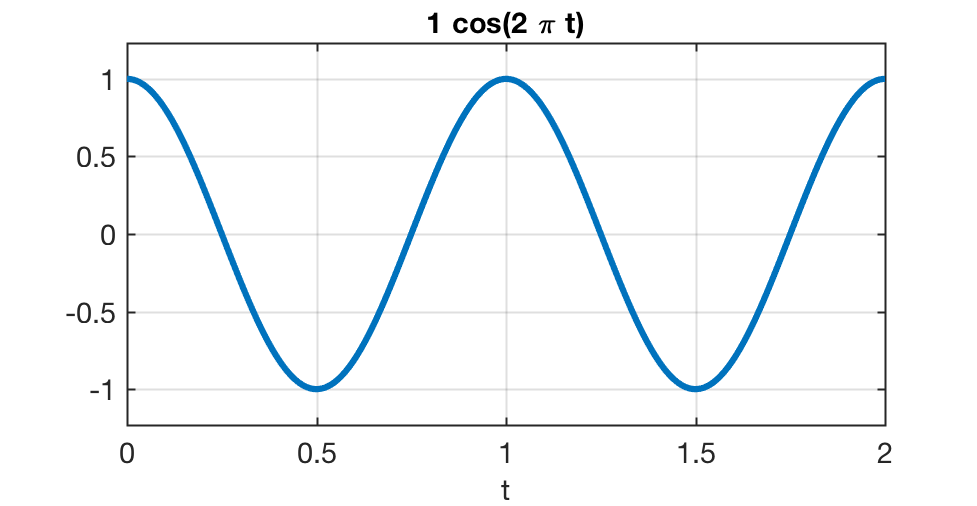
Em termos mais práticos, podemos gerar a seguinte figura:
| Sinal original (com ruído) | Derivada do sinal da esquerda |
|---|---|
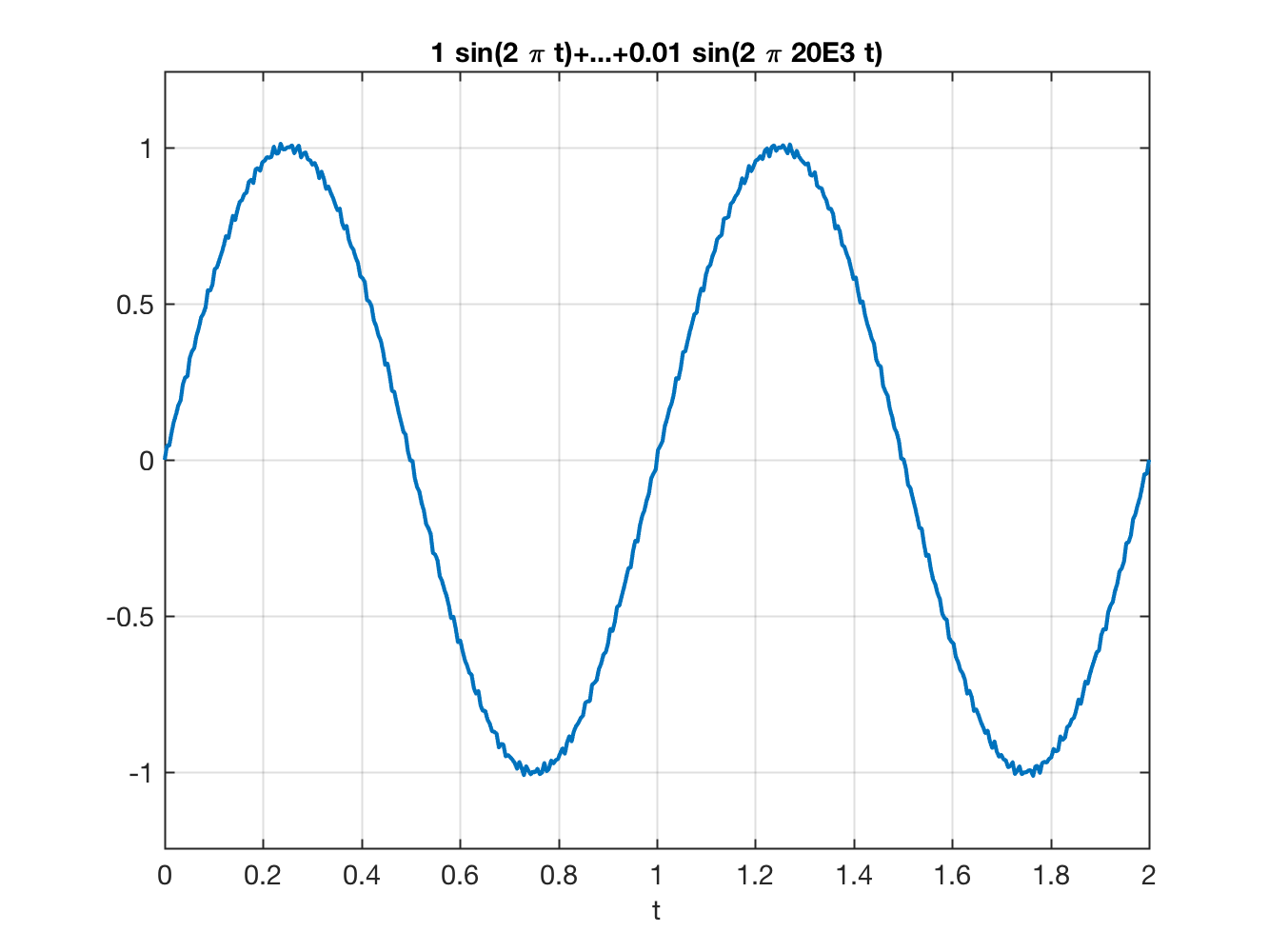 | 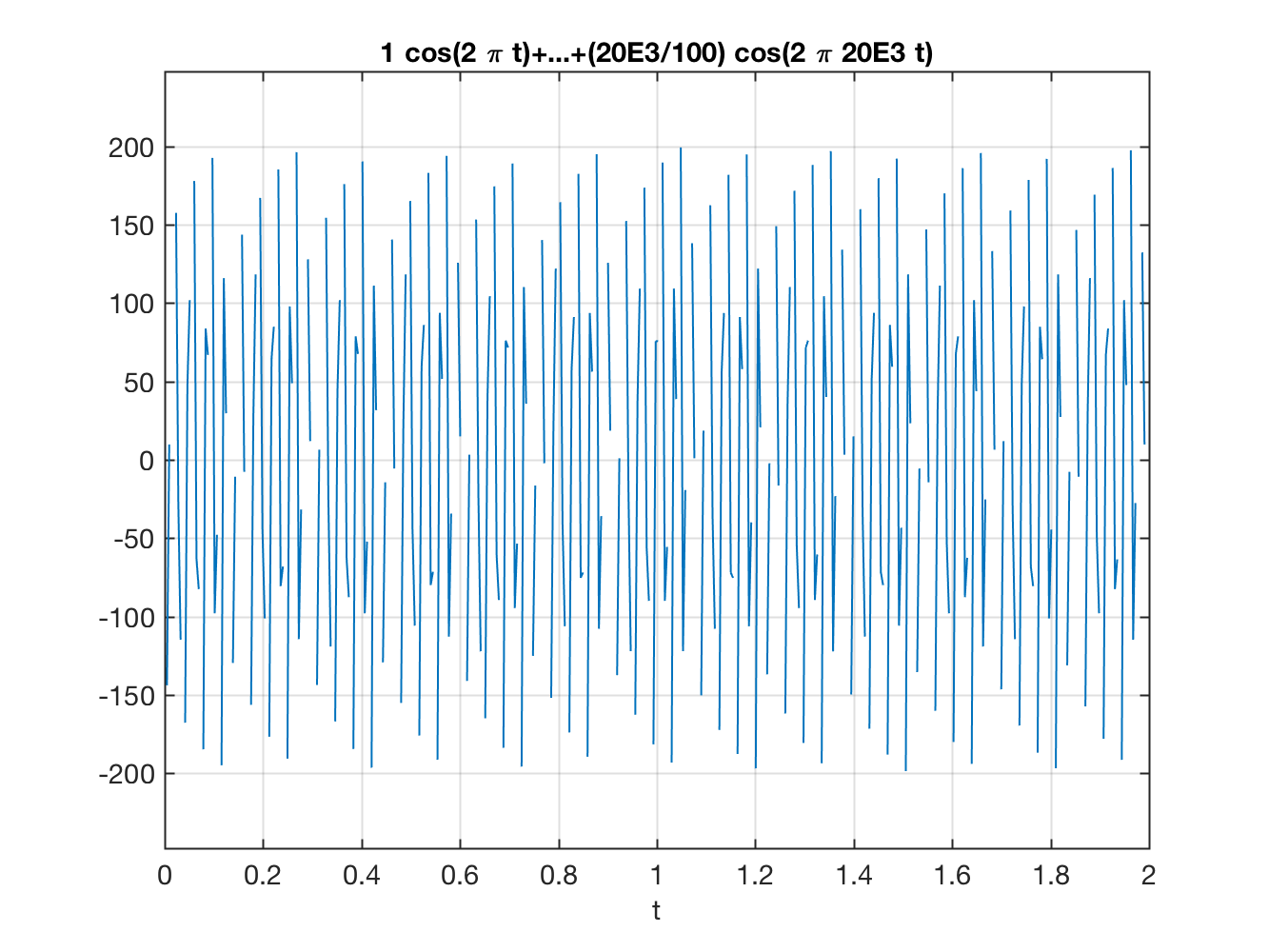 |
 | 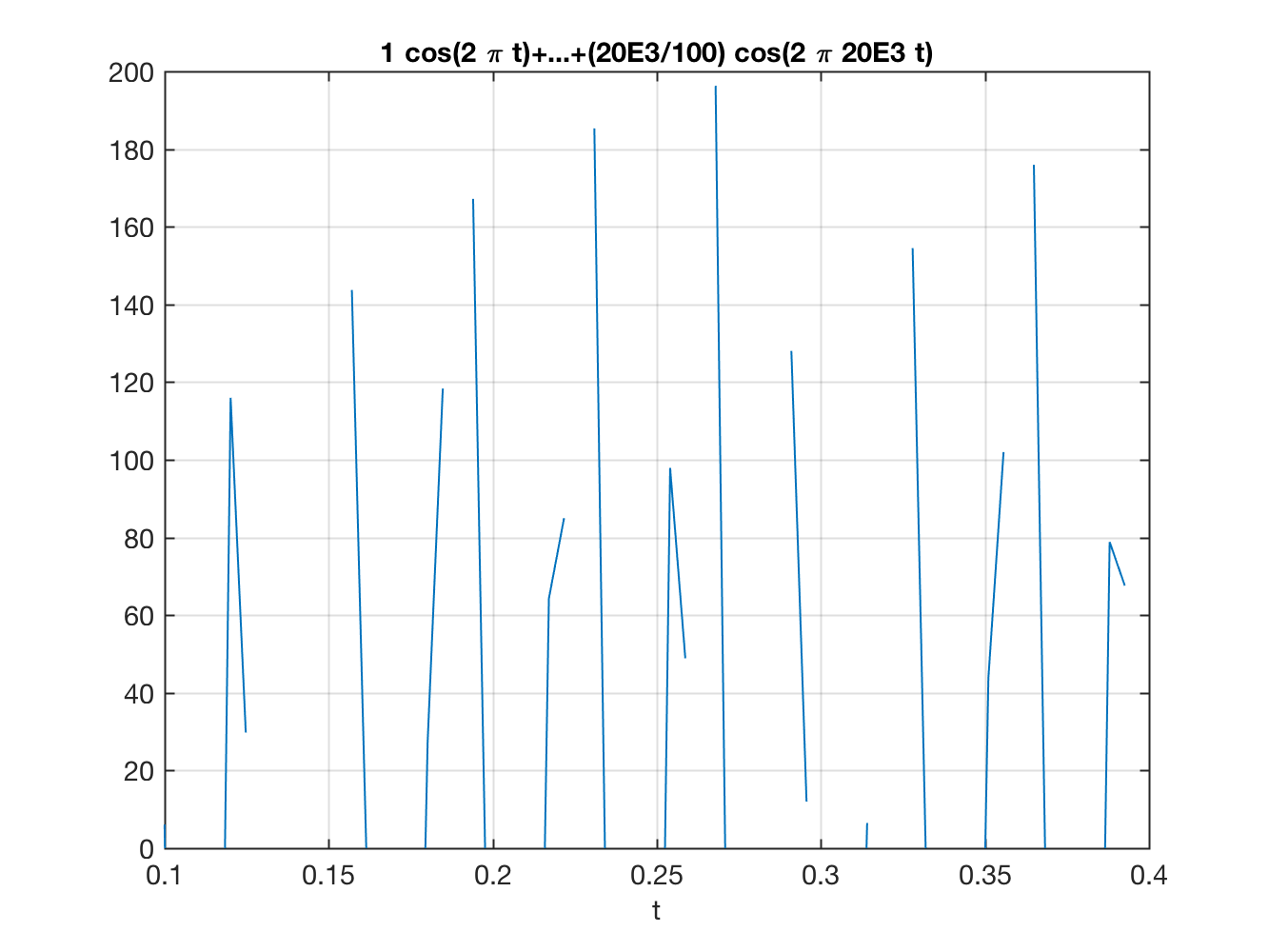 |
Código usado na Matlab para a simulação (gráficos anteriores):
>> t_fim=2*1; % fim do período de simulação para 2 ciclos sinal original 1 Hz>> figure;>> ezplot('1*sin(2*pi*t)+0.01*sin(2*pi*60*t)+0.01*sin(2*pi*20E3*t)', [0 2]) % sinal antes da derivada>> figure; >> ezplot('1*cos(2*pi*t)+(60/100)*cos(2*pi*60*t)+(20E3/100)*cos(2*pi*20E3*t)', [0 2])Note o que era esperado:
Obviamente que estamos muito distantes do desejado devido ao ruído. A questão é a forma como o derivador funciona. Por exemplo, atente para o diagrama de Bode, sua parte de amplitude para um Derivador Puro:
Cujo diagrama de Bode rende:
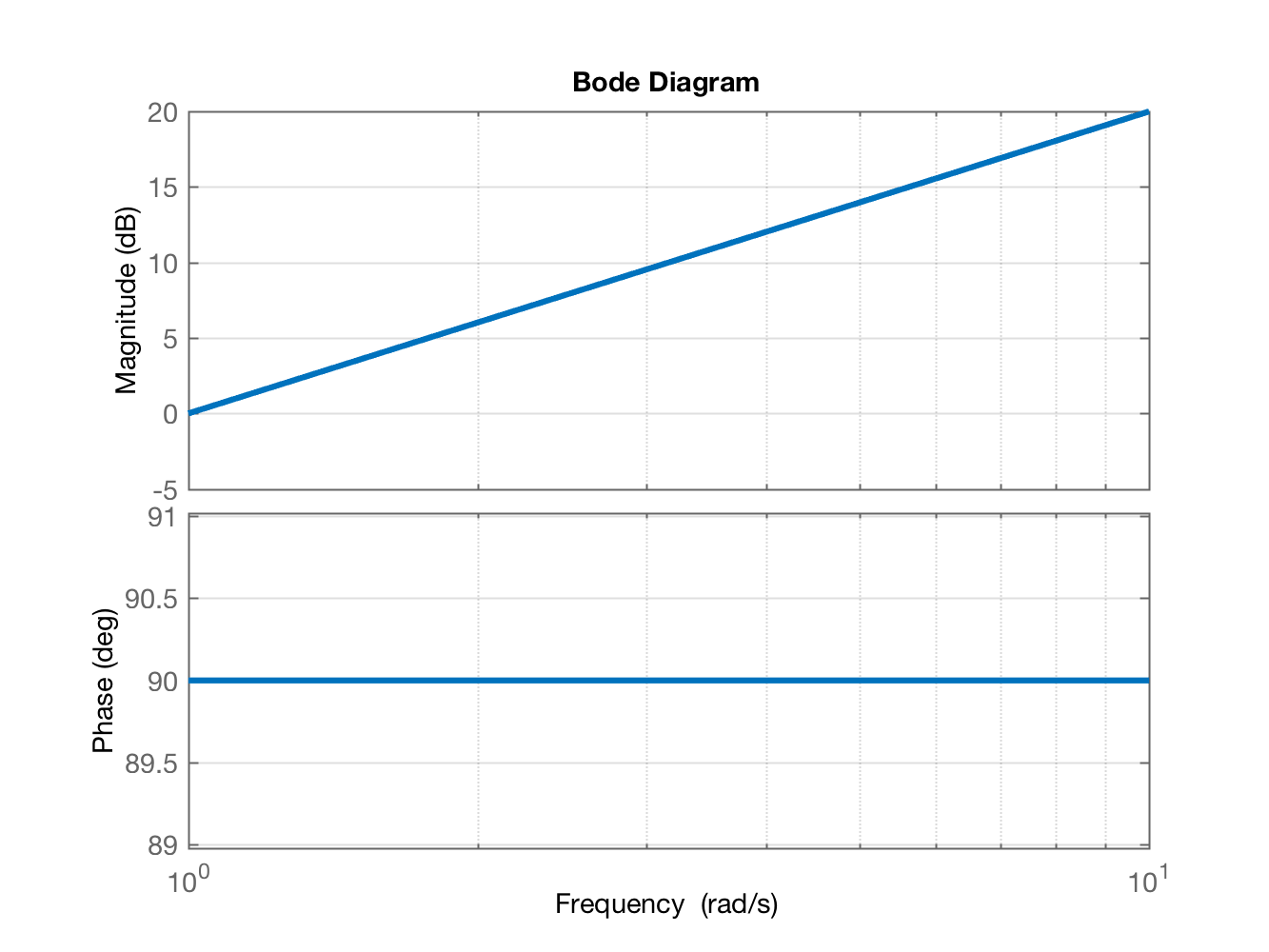
Então percebe-se claramente que um Derivador Puro amplifica enomermente componentes de alta frequência.
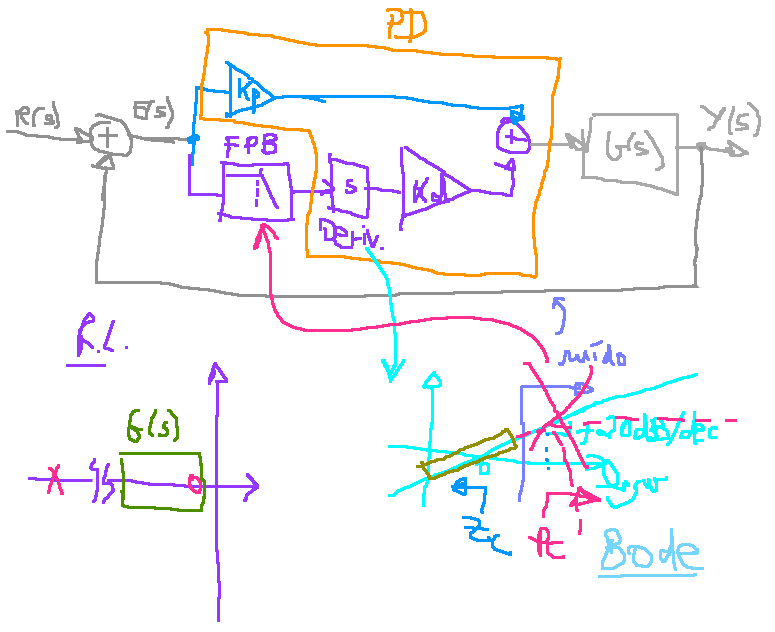
Uma forma de solucionar o problema é incorporar m filtro passa-baixas (FPB) no sinal de erro que passará pelo bloco derivador, o que vai resultar num controlador por Avanço de Fase (Lead), algo como:
Exemplo:
Supondo o que muda quando partimos para um controlador PD, consideramos agora outra planta já abordada anteriormente:
Para a mesma foi realizado um projeto de PD que rendeu:
Lembrando da eq. do PD, temos:
E então teríamos: e .
E um Lead para este sistema poderia ser:
onde o pólo seria resultado do acréscimo de um Filtro Passa-Baixa, , à ação derivativa, considerando-se neste caso, uma frequencia de corte de (Hz) (ou (rad/s)).
Note: só a equação do filtro (com ganho DC unitário) resultaria em:
O diagrama de Bode deste Lead ficaria:
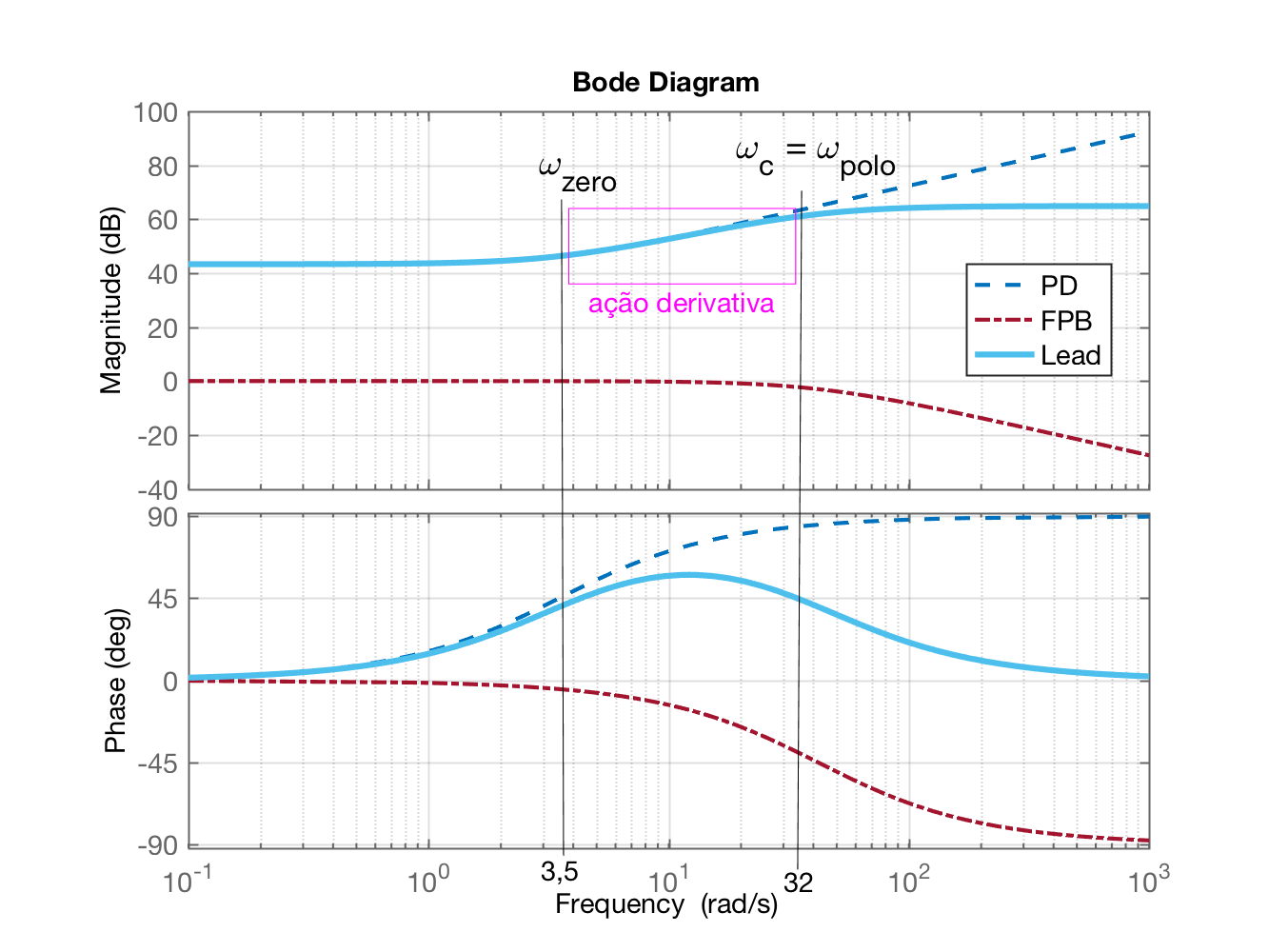
Note o “avanço” (subida) na fase provocado por este tipo de controlador (o caracteriza seu nome) e note que usando um simples Filtro Passa-Baixas de 1a-ordem, o ganho fica limitado após a frequência de corte do filtro (em ). A atuação do filtro seria ainda mais eficaz de o mesmo fosse de 2a-ordem; neste caso, teríamos um decaimento de -20 dB/déc à partir desta frequência de corte, o que significa que não estaríamos mais amplificando derivadas de sinais à partir dos 5 Hz.
Este sistema, a FTMA(s) simulado com um ruído do tipo ..., resultaria em ....:
<<Sorry: não houve tempo para terminar esta simulação>>
Dados salvos como “teste.mat"
Fernando Passold, em 02.06.2021