Melhorias em controlador Proporcional !?
Seja a planta:
Um controlador Proporcional para a mesma, limitando , ficaria:
>> G=tf ( 3, 100*poly([-3/5 -2/5 -1/10]) );Realizando o RL para este sistema, encontraremos um ganho próximo de 2.
Fechando a malha, teremos uma resposta como:
>> ftmf_K1=feedback(2*G, 1);>> step(ftmf_K1)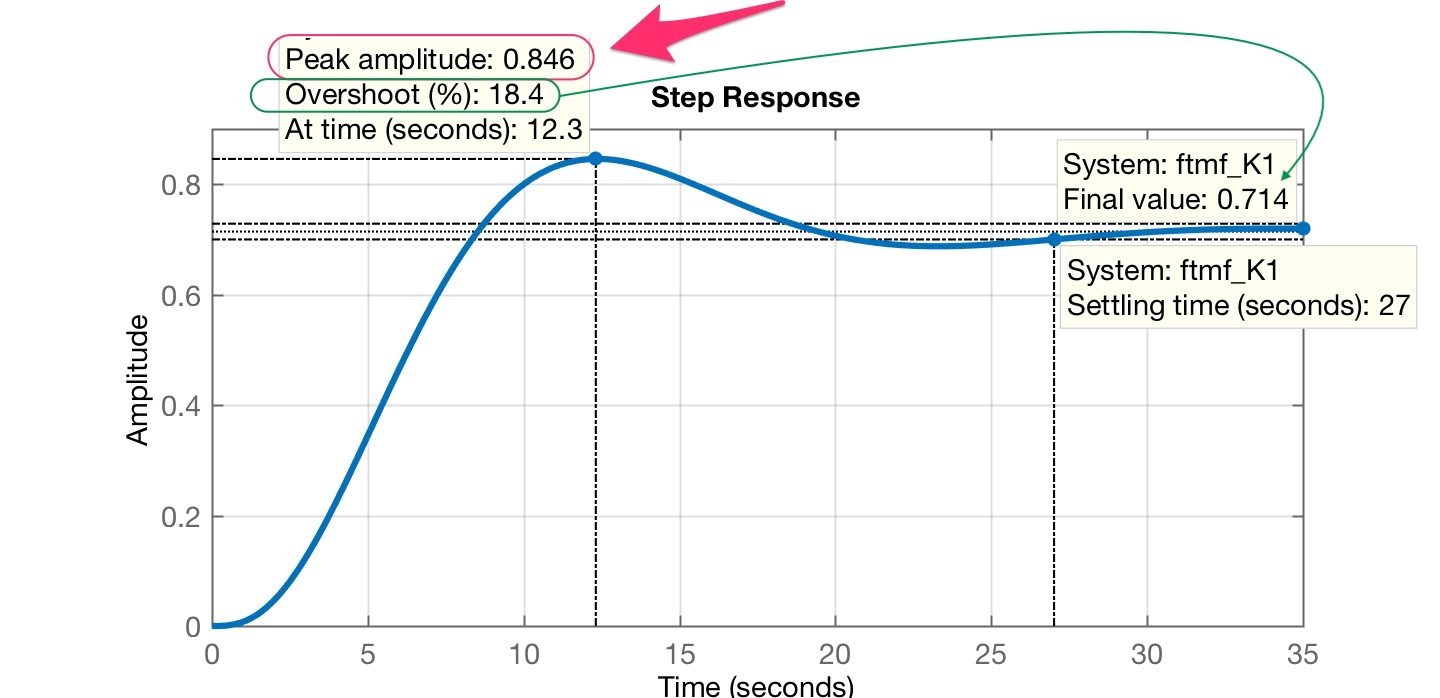
Note que o mostrado pelo Matlab na figura se refere ao valor em regime permanente atingido pela planta (), mas não corresponde ao overshoot máximo (ou sobresinal máximo) admitido para a referência que deveria fazer a planta alcançar o valor final unitário e não como neste caso.
Isto significa que podemos aumentar o ganho neste sistema (desde que ele não fique estável) e tentando obedecer ao sobressinal máximo de 20% em relação ao valor final que a referência deveria atingir (), o que significa neste caso, que o controlador à ser projetado aqui, poderia forçar a planta à atingir picos de no máximo .
Supondo que com possamos fazer a planta chegar próximo deste patamar máximo, podemos fazer:
>> ftmf_K2=feedback(4*G, 1);>> step(ftmf_K1, ftmf_K2)>> legend('Kp=2' , 'Kp=4')O que rederia a figura:
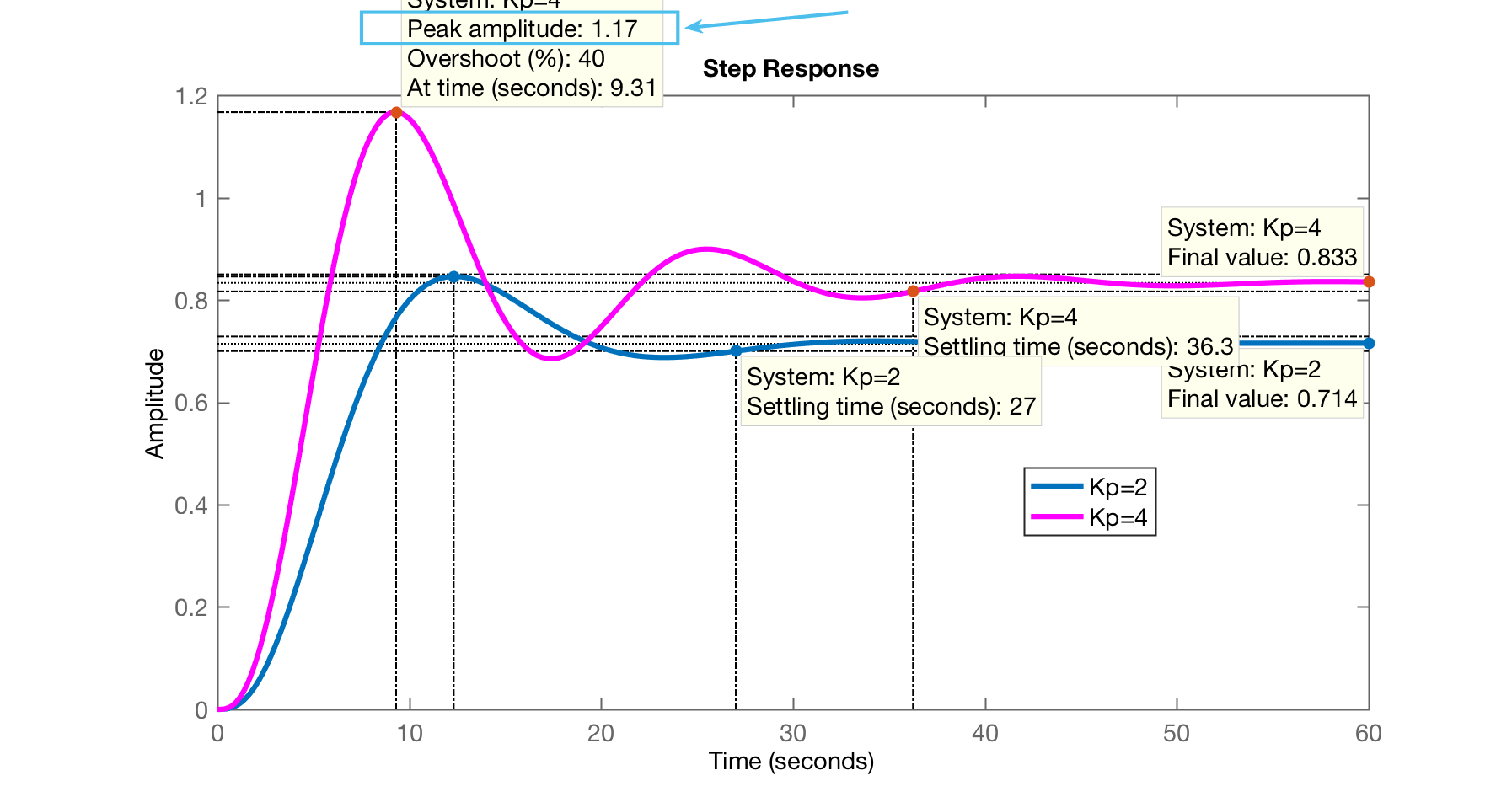
Notamos que com , a amplitude de saída da planta aumenta, o sobressinal também: , mas ficando ainda abaixo dos 20% máximo permititos.
Aumentar o ganho fez o erro baixar: ; contra antes: ,
apesar de aumenar o tempo de assentamento do sistema, de para .
A questão agora para decidir por qual valor de ganho adotar passa por: -- o que é prioritário? Menor erro ou menor tempo de assentamento?
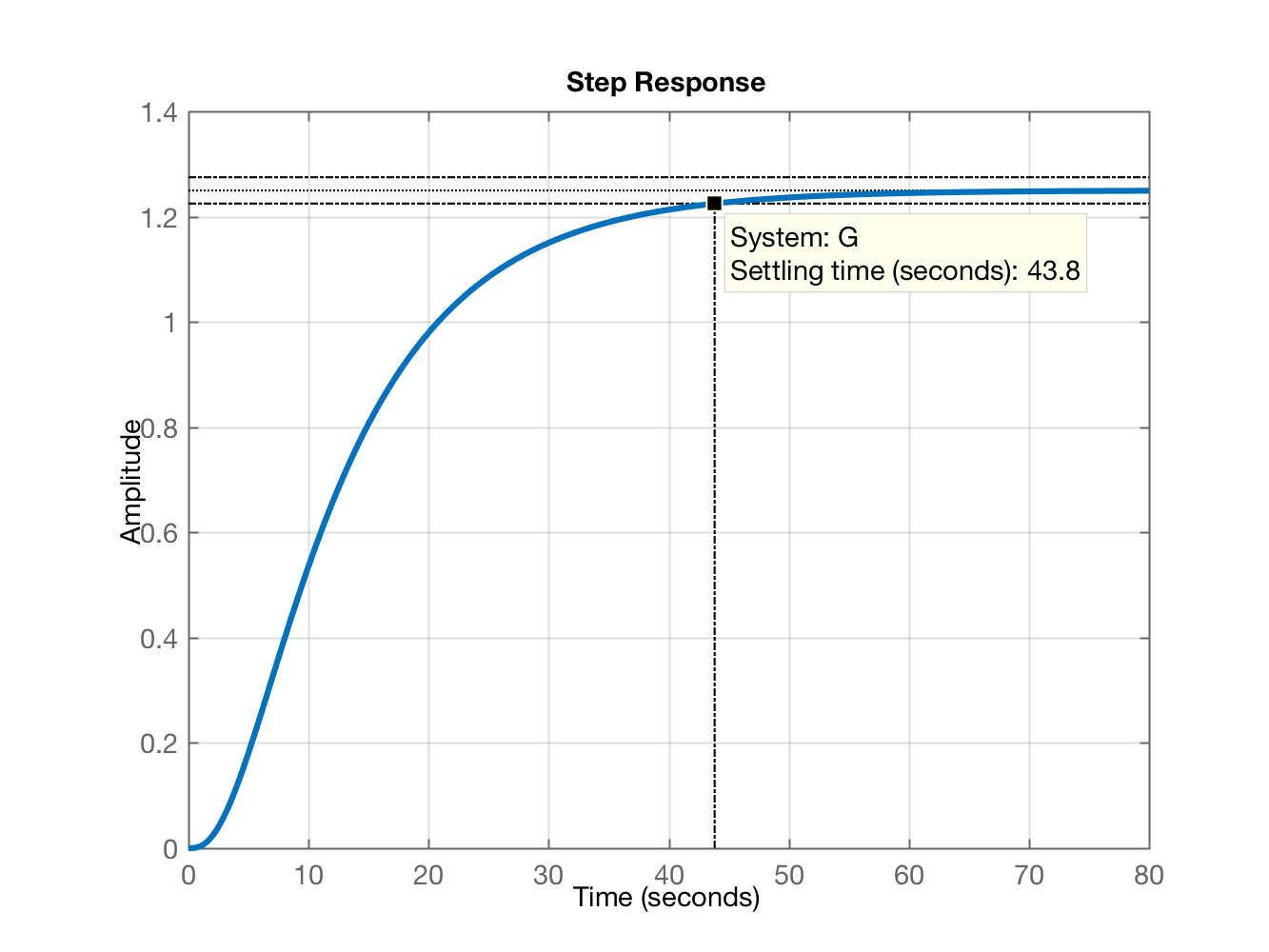
Mesmo que seja adotado o maior ganho, ainda percebemos que este sistema em MF (malha-fechada) responde um pouco mais rápido que o sistema em MA (malha-aberta): segundos:
Amplitudes das Ações de Controle
Adotar um ganho mais elevado vai implicar em expor à planta à maiores valores de atuação.
Existe uma forma prática de forçar o Matlab a mostrar as amplitudes geradas por certo controlador, SEM apelar para o Simulink. Para tanto necessitamos realizar uma ligeria manipulação algébrica:
De um sistema com realimentação unitária negativa sabemos que:
(1)
(2)
(3)
Substituindo (2) em (1) teremos:
(4)
E podemos ainda substituir (3) em (4), o que resulta em:
trabalhando a eq. anterior, podemos escrever:
(5)
A eq. (5) é a que vai nos permitir usar a linha de comandos do Matlab para plotar .
Se você já reparou antes, quando realiza o comando:
x>> step(ftmf_exemplo) % Resposta ao degrau no domínio tempoVocê está pedido que o Matlab faça o seguinte:
- , onde corresponde à transformada de Laplace da função Degrau;
- , implica algebricamente a realizar expansão em frações parciais para resolver esta transformada. Pois bem, o Matlab não resolve este problema algebricamente e sim numericamente.
- Por fim, o Matlab cria internamente um vetor (tempo) varianando de , onde é um valor estipulado pelo algoritmo
stepdo Matlab de tal forma que corresponda ao . - O Matlab finalmente realiza algo como:
plot (t,y).
Então, no nosso caso agora, necessitamos que o Matlab plote baseado na eq. (5) que deduzimos anteriormente.
Note que podemos adaptar a função step do Matlab para que a mesma plote ao invés de , bastando neste caso, fornecer adequandamente uma nova função transferência. Note que toda função step multiplica a transfer function passada como argumento de entrada pela transformada de Laplace da entrada degrau e segue com o processamento citado anteriormente até finalizar o no gráfico.
Baseado na eq. (5), basta repassar então a seguinte transfer function à função step:
Se (5):
onde:
Então realizar: >> step(aux) é o equivalente à plotar .
Aplicando esta constatação ao nosso caso:
x
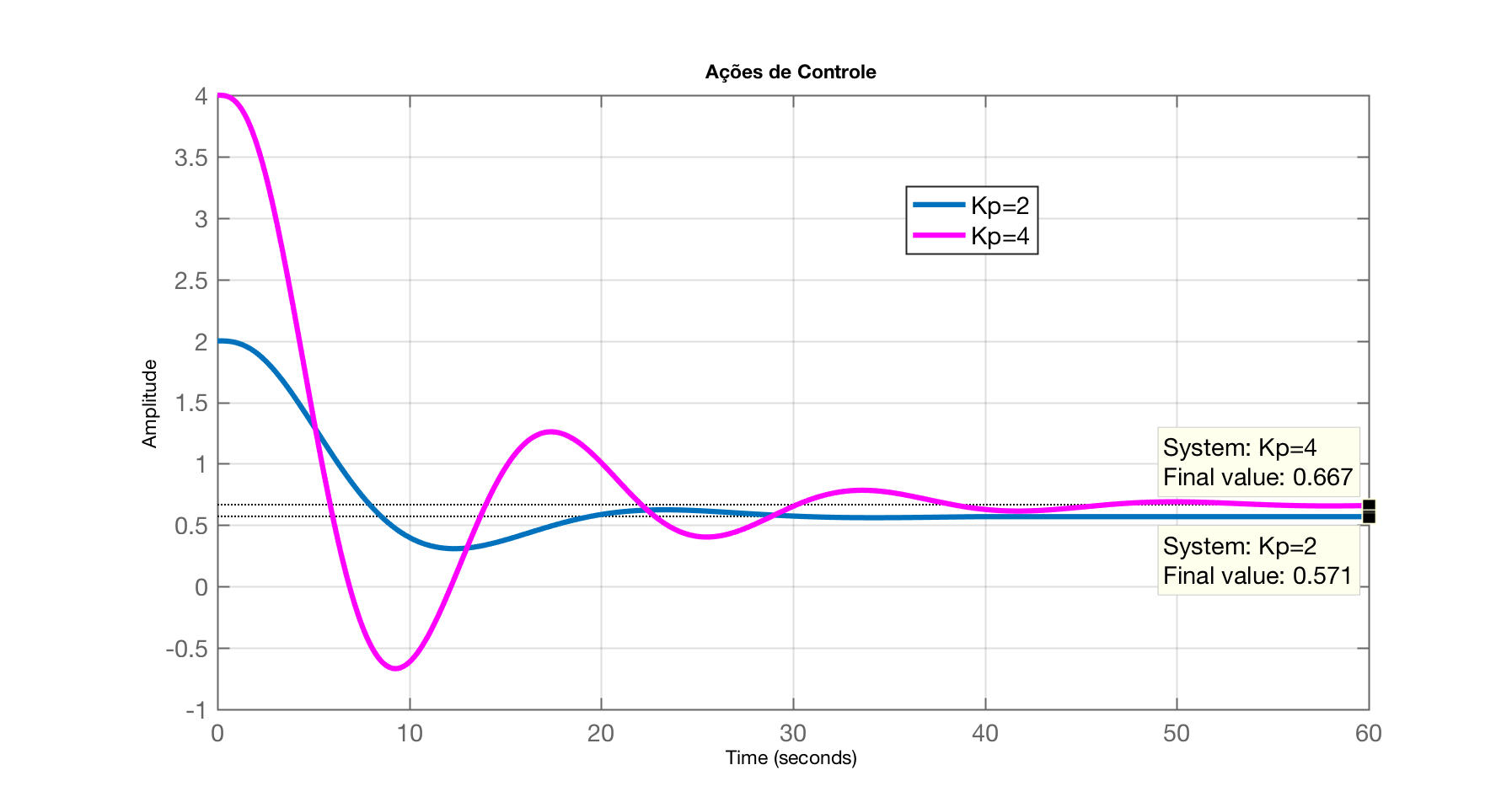
>> aux_K1=2*1/(1+2*G);>> zpk(aux_K1) 2 (s+0.6) (s+0.4) (s+0.1) ---------------------------------- (s+0.8078) (s^2 + 0.2922s + 0.104) Continuous-time zero/pole/gain model.>> aux_K2=4/(1+4*G);>> zpk(aux_K2) 4 (s+0.6) (s+0.4) (s+0.1) --------------------------- (s+0.9) (s^2 + 0.2s + 0.16) Continuous-time zero/pole/gain model.>> figure; step(aux_K1, aux_K2);>> legend('Kp=2' , 'Kp=4')>> title(string('Ações de Controle'))Note que o resultado das expressões “aux_K1” e “aux_K2” não nos importam muito, foram mostradas anteriormente mais como curiosidade. O que importa é notar o resutlado da função step aplicada desta forma:
Fim.
Fernando Passold, em 04.06.2021