Continuação de aulas anteriores
Aula de 26/10/2020
Iniciando e retomando nova seção de trabalho no Matlab:
>> diary aula_26_10_2020.txt % criando novo arquivo texto log desta aula
>> % Continuando projetos de controladores usando Root Locus
>>
>> % # Controlador PI
>>
>> % recuperando dados da aula passada
>> load planta
>> zpk(G) % revisando transfer fuction da planta
1
------------------
(s+10) (s+2) (s+1)
Iniciando projeto de PI. Num primeiro momento, alocando zero do PI entre o pólo do mesmo (integador) e o pólo mais lento da planta (em \(s=-1\)); alocando arbitrariamente o zero em \(s=-0,5\):
>> C_PI=tf( [1 0.5] , [ 1 0 ] )
C_PI =
s + 0.5
-------
s
>> ftma_PI=C_PI*G; % determinando a FTMA(s) com este controlador
>> zpk(ftma_PI)
(s+0.5)
--------------------
s (s+10) (s+2) (s+1)
>> rlocus(ftma_PI)
>> OS % recordando %OS adotado
OS =
20
>> zeta = (-log(OS/100))/(sqrt(pi^2 + (log(OS/100)^2)))
zeta =
0.4559
>> hold on % acrescentando + info no RL anterior
>> sgrid(zeta, 0)
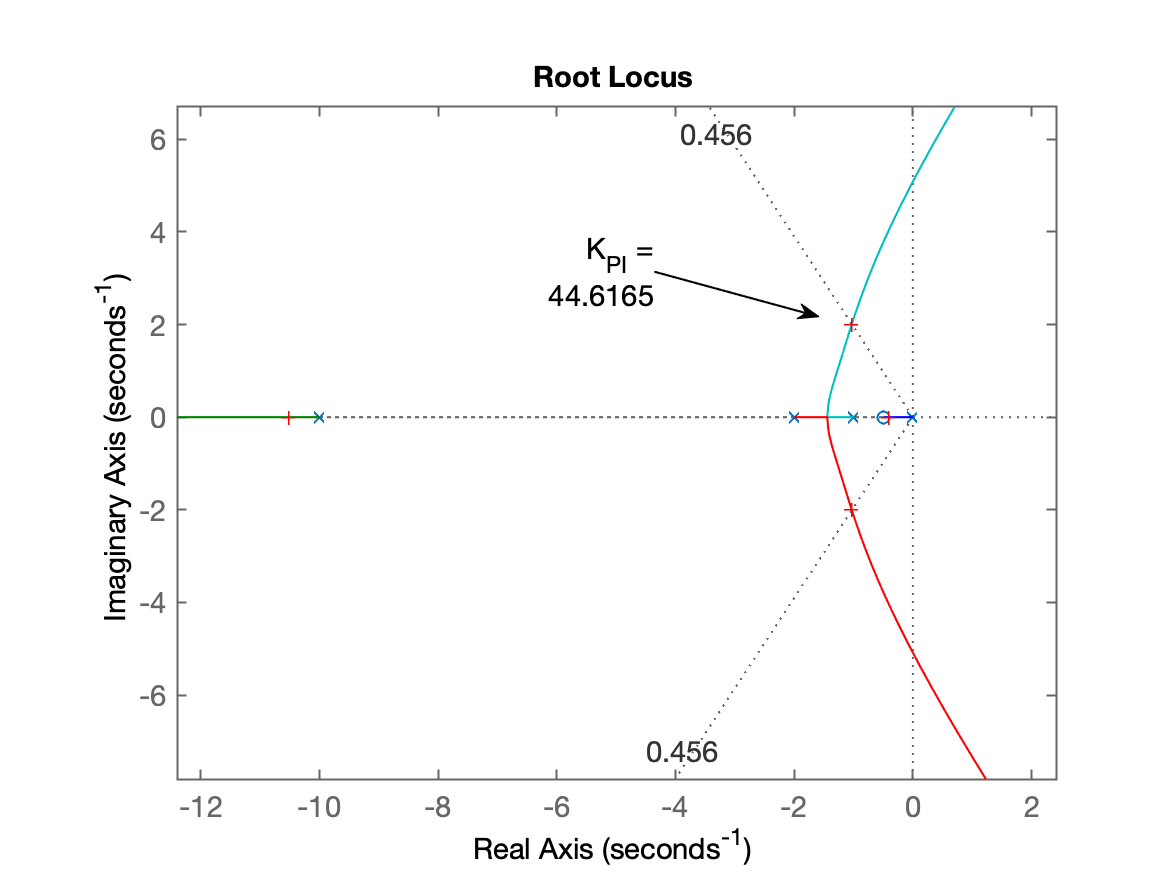
>> % Sintonizando este controlador (determinando seu ganho)
>> [K_PI, polos_MF]=rlocfind(ftma_PI)
Select a point in the graphics window
selected_point =
-1.0370 + 2.0067i
K_PI =
44.6165
polos_MF =
-10.5235 + 0.0000i
-1.0296 + 2.0048i
-1.0296 - 2.0048i
-0.4173 + 0.0000i
>> RL resultando para o projeto do primeiro PI:
Continuando projeto
>> % Fechando a malha
>>
>> ftmf_PI=feedback(K_PI*ftma_PI, 1);
>> figure; step(ftmf, ftmf_I, ftmf_PI)
>>
>> % Resposta ao degrau unitário
>>
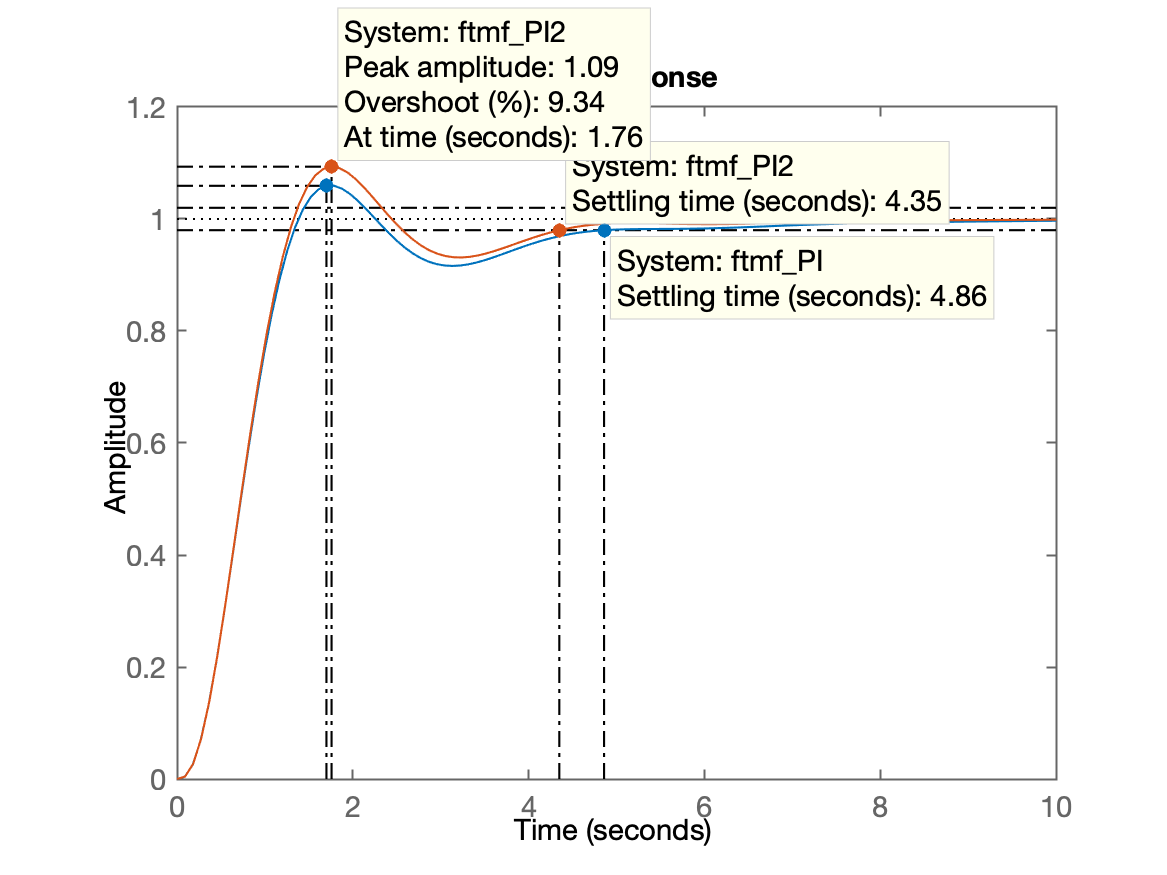
>> stepinfo(ftmf_PI)
ans =
struct with fields:
RiseTime: 0.8671
SettlingTime: 4.8588
SettlingMin: 0.9162
SettlingMax: 1.0593
Overshoot: 5.9275
Undershoot: 0
Peak: 1.0593
PeakTime: 1.6997
>>Resposta ao degrau, incluindo controladores anteriormente projetados:
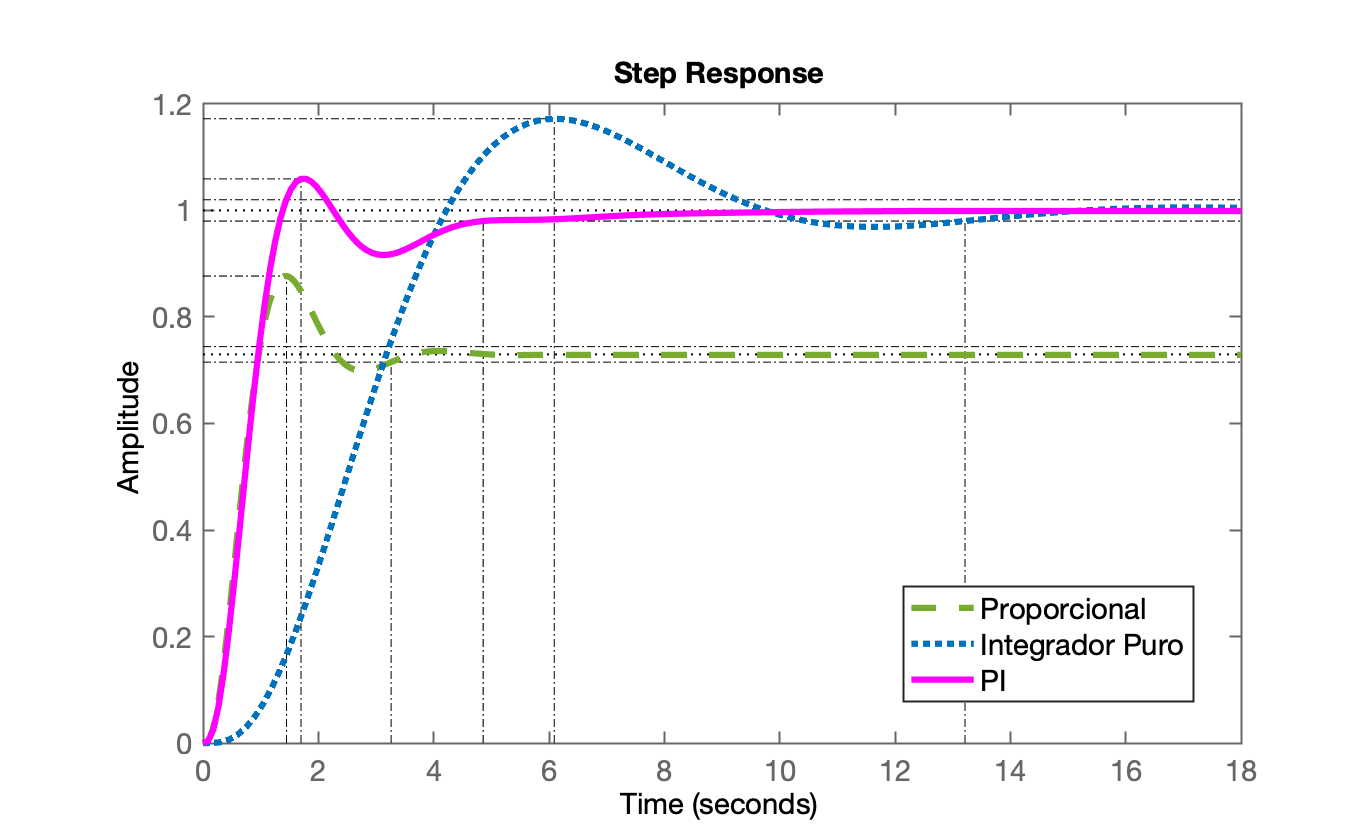
Note que:
Novas considerações: haveria como "acelerar" este PI? Reduzir seu \(t_s\)?
Comparando o RL do Controlador Proporcional com o do PI se percebe que um PI nunca vai conseguir ser mais rápido que um controlador Proporcional:
| RL Controle Proporcional | RL PI |
|---|---|
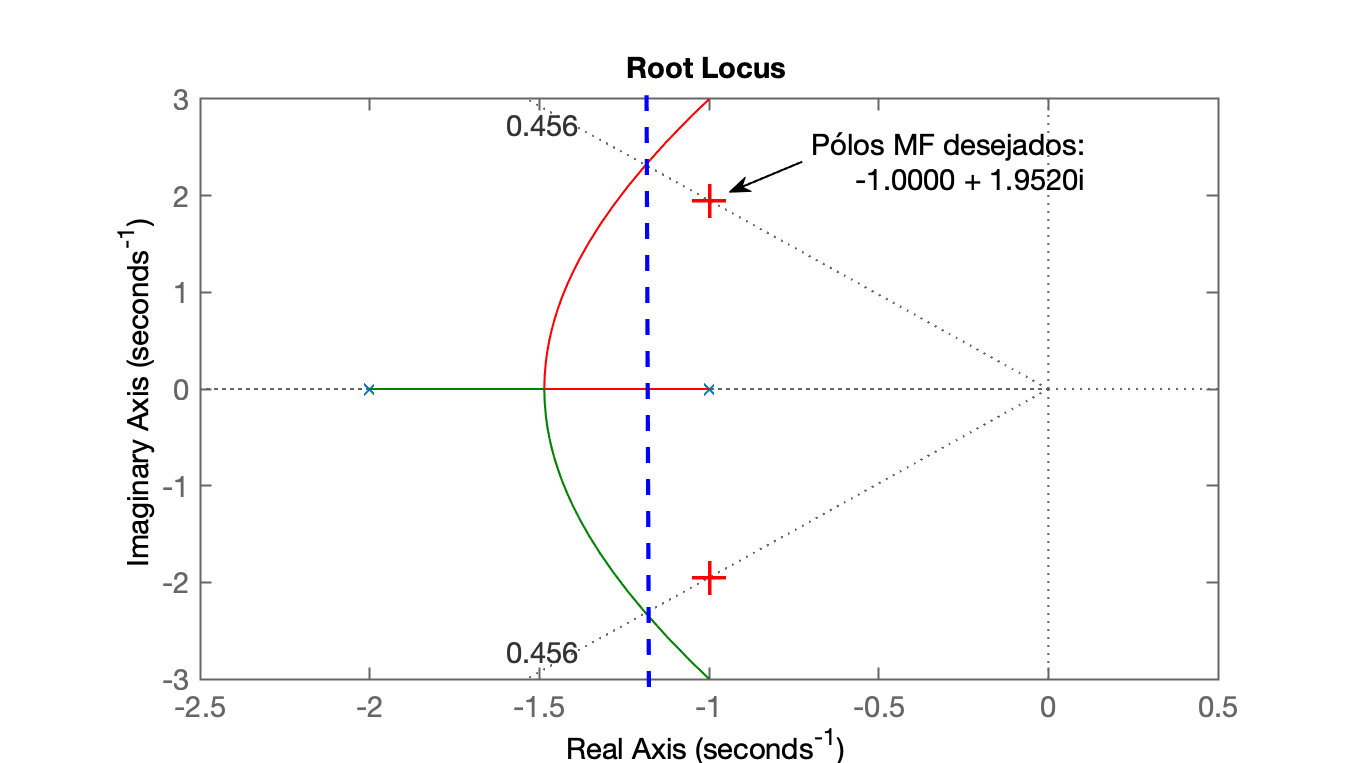 |
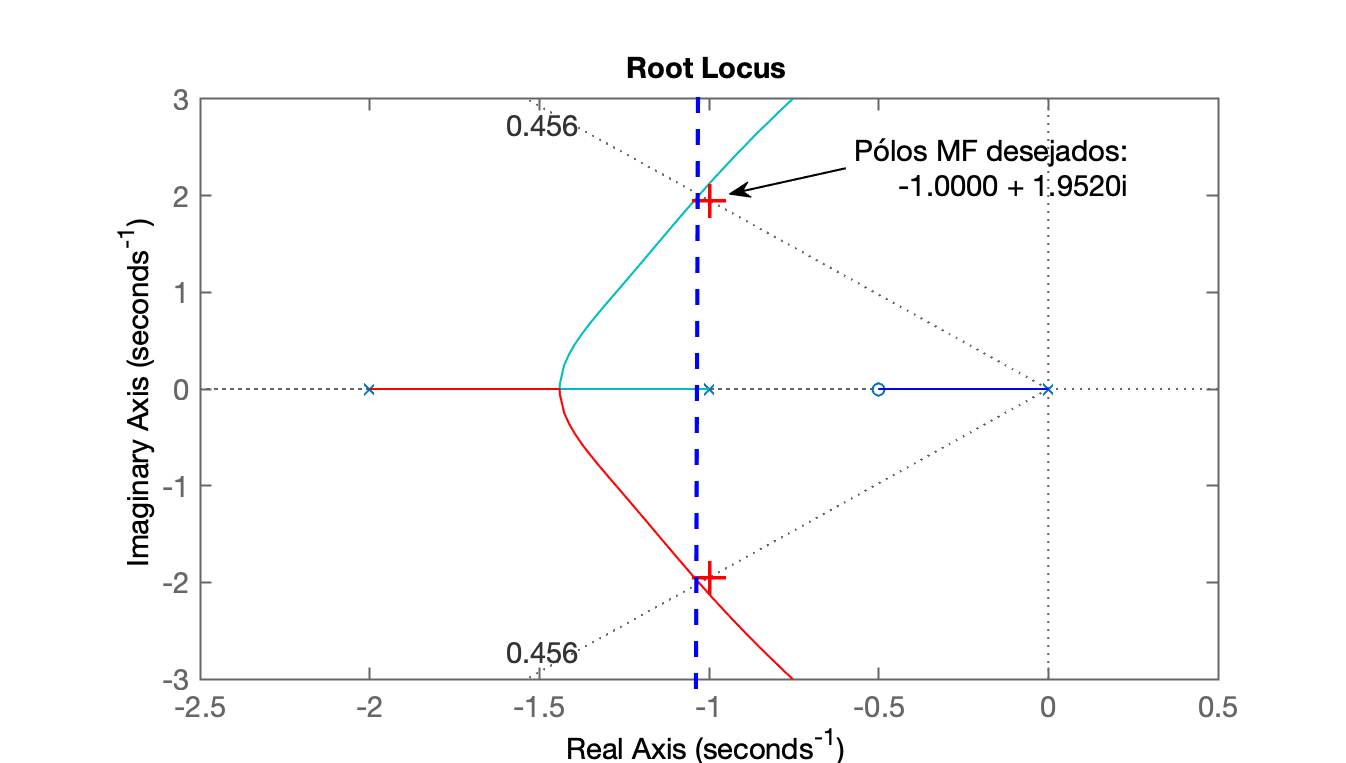 |
| Código: | Código: |
| >> figure; rlocus(G) >> hold on >> sgrid(zeta,0); >> plot(polos_mf, 'r+') >> axis([-2.5 0.5 -3 3]) |
>> figure; rlocus(ftma_PI) >> hold on >> sgrid(zeta,0); >> plot(polos_mf, 'r+') >> axis([-2.5 0.5 -3 3]) |
O pólo do PI (integrador, localizadao na origem do plano-s), atrai o pólo mais lento na direção da origem do plano-s, atrasando a resposta transitória do sistema. Mas podemos tentar projetar um segundo PI verificando se podemos atender \(t_s \le 4\) segundos.
Para evitar de ficar arbitrando o zero do PI em diferentes locais até atender a este novo requisito, o correto seria:
Para isto usamos o método da contribuição angular:
>> t_s_d=4; % ts desejado
>> wn = 4 / (zeta*t_s_d) % calculando wn = freq. natural oscilação
wn =
2.1932
>> wd = wn*sqrt(1-zeta^2) % parte imaginários dos pólos desejados em MF
wd =
1.9520
>> sigma = wn*zeta % parte real dos pólos desejados de MF
sigma =
1.0000
>> polos_mf=[-sigma+i*wd -sigma-i*wd]
polos_mf =
-1.0000 + 1.9520i -1.0000 - 1.9520i
>> PI2_aux=tf([1], [1 0]);
>> ftma_PI2_aux=PI2_aux*G;
>> zpk(ftma_PI2_aux)
1
--------------------
s (s+10) (s+2) (s+1)
>> figure; pzmap(ftma_PI2_aux)
>> hold on;
>> plot(polos_mf, 'r+')
>> axis([-11 0 -2.5 2.5])O gráfico à seguir mostra o que se deseja realizar usando contribuição angular. Os cálculos dos ângulos seguem no próximo bloco de códigos.
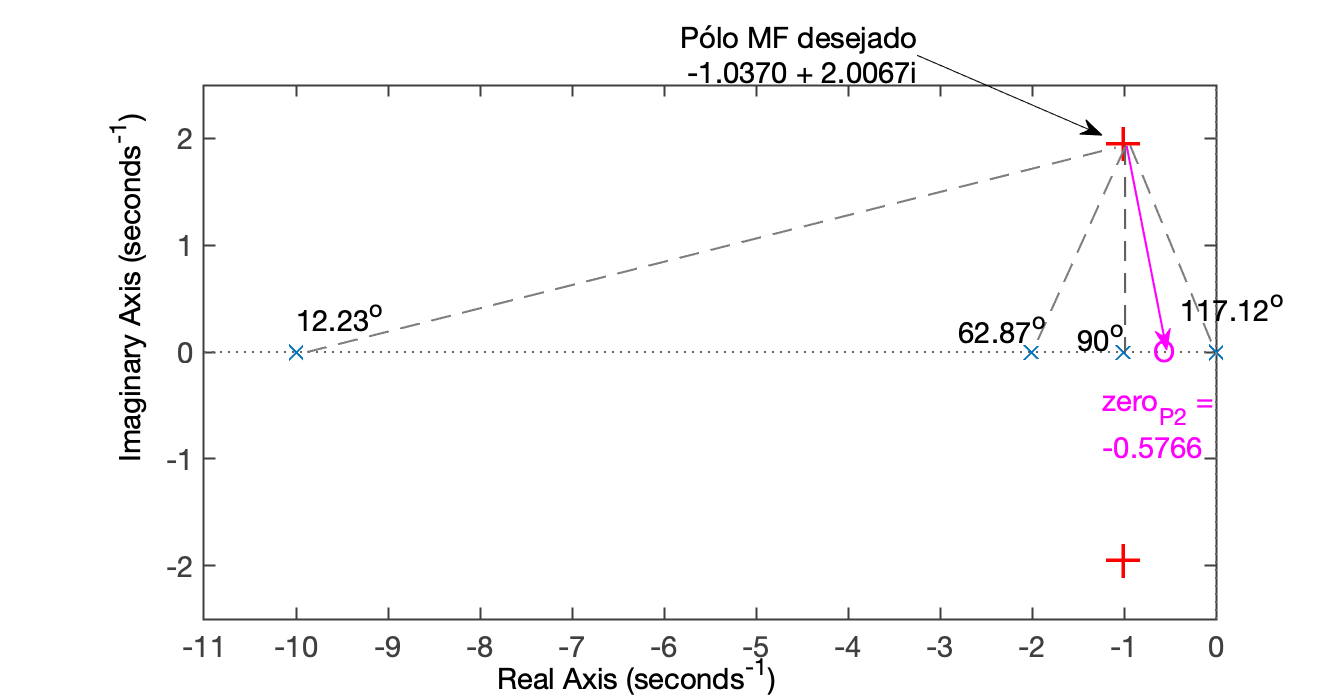
Calculando os ângulos:
>> % Realizando cálculos dos ângulos formados pelos pólos da FTMA
>> theta1=atan2(wd,-1)
theta1 =
2.0442
>> theta1_deg=theta1*180/pi
theta1_deg =
117.1261
>> theta2=pi/2;
>> theta2_deg=theta2*180/pi
theta2_deg =
90
>> theta3=atan2(wd,1)
theta3 =
1.0974
>> theta3_deg=theta3*180/pi
theta3_deg =
62.8739
>> theta4=atan2(wd,9)
theta4 =
0.2136
>> theta4_deg=theta4*180/pi
theta4_deg =
12.2372
>> sum_theta=theta1+theta2+theta3+theta4
sum_theta =
4.9260
>> sum_theta_deg=sum_theta*180/pi
sum_theta_deg =
282.2372
>> theta_zera_deg=360-sum_theta_deg
theta_zera_deg =
77.7628
>> theta_zero=2*pi-sum_theta
theta_zero =
1.3572
>> delta_x=wd/tan(theta_zero)
delta_x =
0.4234
>> zero_P2 = -1 + delta_x
zero_P2 =
-0.5766Continuando o projeto, e montando o PI2 conforme as especificações e cálculos de contribuição angular:
>> % Montando tf do PI2
>> PI2=tf([1 -zero_P2],[1 0])
PI2 =
s + 0.5766
----------
s
>> ftma_PI2=PI2*G;
>> % Partindo para ajuste do ganho do PI2
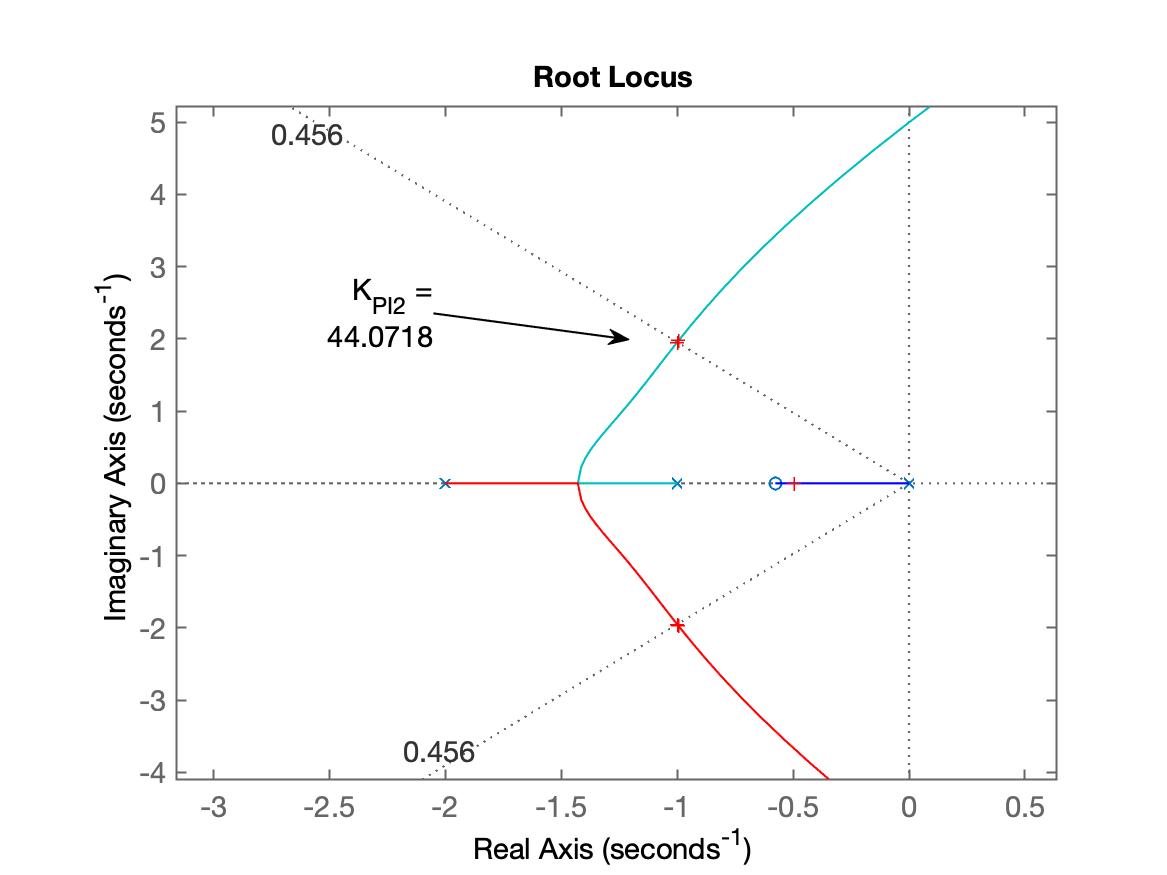
>> figure; rlocus(ftma_PI2)
>> hold on
>> sgrid(zeta, 0)
>> plot(polos_mf, 'r+')
>> [K_PI2, polosMF]=rlocfind(ftma_PI2)
Select a point in the graphics window
selected_point =
-0.9946 + 1.9715i
K_PI2 =
44.0718
polosMF =
-10.5142 + 0.0000i
-0.9951 + 1.9717i
-0.9951 - 1.9717i
-0.4955 + 0.0000i
>> RL do PI2:
Fechando a malha e verificando resultado alcançado:
>> ftmf_PI2=feedback(K_PI2*ftma_PI2, 1);
>> figure; step(ftmf_PI, ftmf_PI2)Resposta ao degrau:
Antes de continuar com outros projetos:
>> save planta
>> diary offAlocando o zero ligeiramente mais afastado do eixo jw em comparação ao PI anterior.
Diferente do PI, O compensador por atraso de fase possui seu pólo deslocado da origem do plano-s. Quanto mais próximo, mais desempenha um papel similar ao PI (integrador). Quanto mais afastado este pólo estiver da origem, maior será o será o erro em regime permanente (menor o papel como integrador).
>> diary aula_26_10_2020.txt % recomeçando arquivo anterior
>> % # Projeto do Compensandor de Atraso (Lag)
>>
>> % Alocando o zero ligeiramente mais afastado do eixo jw em comparação ao PI anterior
>> C_Lag=tf([1 0.6], [1 0.1]);
>> zpk(C_Lag)
ans =
(s+0.6)
-------
(s+0.1)
>> ftma_Lag=C_Lag*G;
>> zpk(ftma_Lag)
(s+0.6)
--------------------------
(s+10) (s+2) (s+1) (s+0.1)
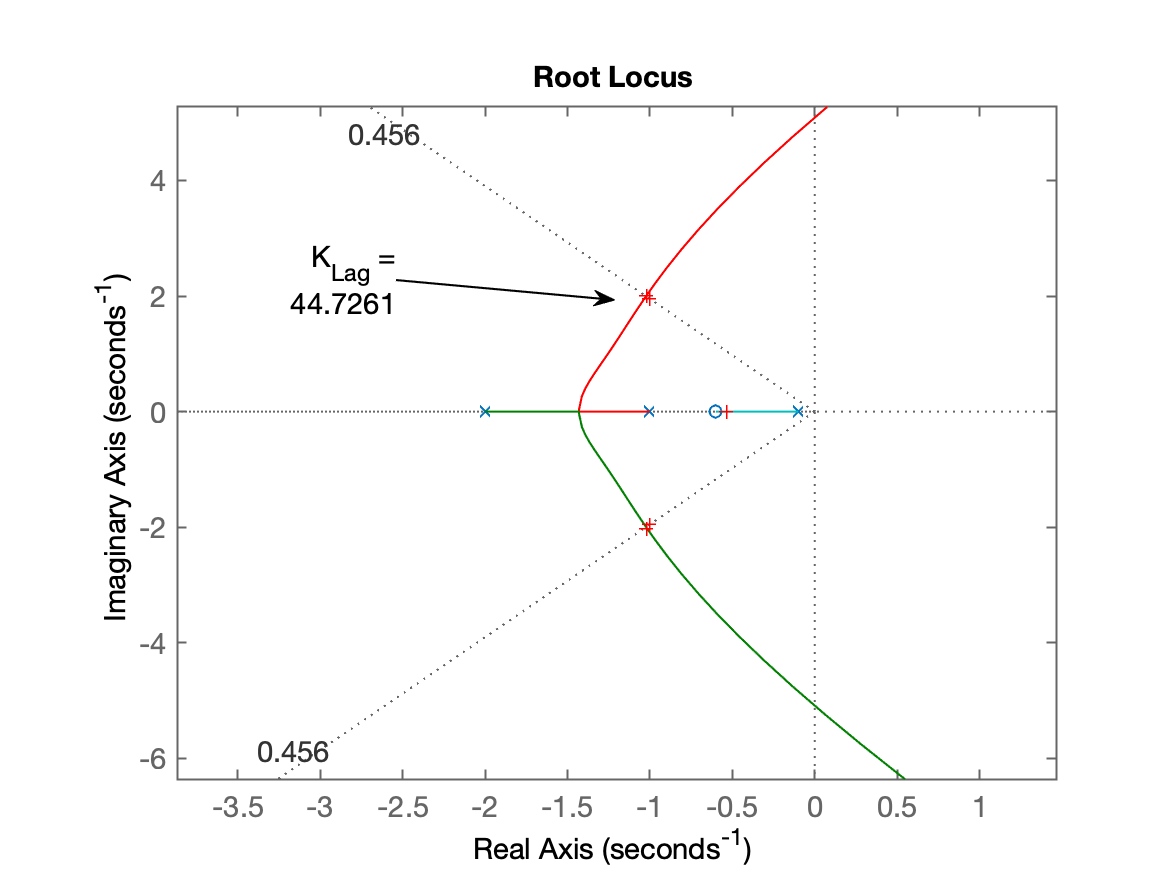
>> figure; rlocus(ftma_Lag)
>> hold on
>> sgrid(zeta, 0);
>> plot(polos_mf, 'r+')
>> [K_Lag,polosMF]=rlocfind(ftma_Lag)
Select a point in the graphics window
selected_point =
-1.0289 + 2.0173i
K_Lag =
44.7261
polosMF =
-10.5245 + 0.0000i
-1.0191 + 2.0149i
-1.0191 - 2.0149i
-0.5374 + 0.0000i
>>Figura do RL para o Lag
Finalizando projeto:
>> % fechando a malha para este ganho
>> ftmf_Lag=feedback(K_Lag*ftma_Lag, 1);
>> figure;
>> step(ftmf_PI2, ftmf_Lag)Resposta ao degrau obtida (comparando com PI2 anterior):
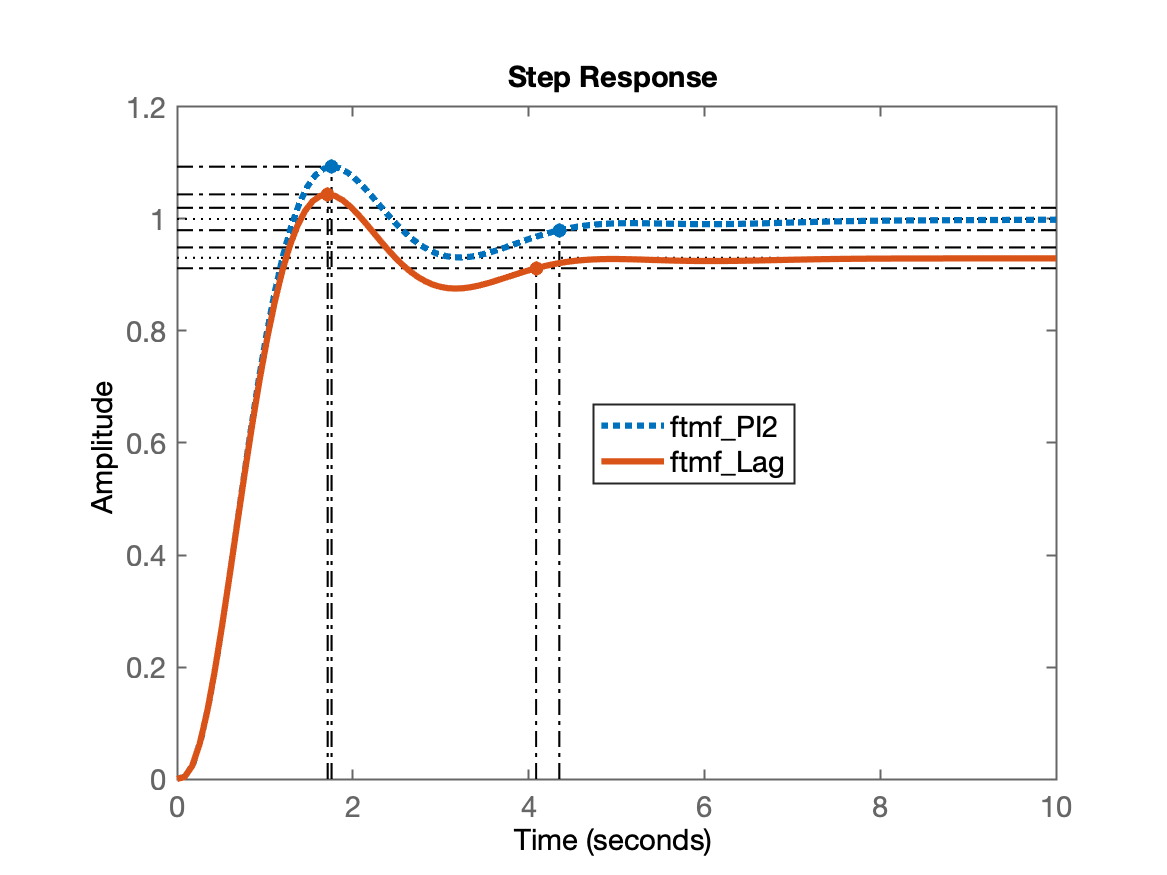
Note que o Lag introduziu erro:
>> dcgain(ftmf_Lag) % valor de y(\infty)
ans =
0.9306
>> erro_Lag=(1-dcgain(ftmf_Lag))/1*100
erro_Lag =
6.9359
>> Encerrando atividades e deixando seção preparada para próxima aula:
>> save planta
>> diary off
>> quitFernando Passold, em 26/10/2020