Aproximação de Padé
Aproximação de PadéIntro1. Aproximação de Padé de 1ª Ordem para Passos para a Dedução:2. Aproximação de Padé de 2ª Ordem para Passos para a DeduçãoResumo das Fórmulas GeraisObservações:Exemplo:Aproximação de Padé para um Atraso de TransporteSistema de 1ª Ordem com AtrasoSimulação no MATLABResultados EsperadosResultados obtidosConclusãoResumoRecapitulandoSe quiser explorar mais
Intro
A aproximação de Padé é uma técnica utilizada para aproximar funções de transferência não racionais (como atrasos puros) por funções racionais, facilitando a análise e projeto de controladores.
A aproximação criada por Henri Padé, por volta de 1890, é obtida através de uma expansão em série de Taylor da função exponencial , combinada com uma função racional que a aproxima. Vamos deduzir as aproximações de 1ª e 2ª ordens passo a passo.
1. Aproximação de Padé de 1ª Ordem para
Queremos aproximar por uma função racional da forma:
Passos para a Dedução:
Expansão em Série de Taylor de : (Para aproximação de 1ª ordem, consideramos até o termo linear.)
Expansão em Série de Taylor de :
Igualando os coeficientes com a expansão de : Portanto:
Escolha de e (critério de Padé):
- Padé de 1ª ordem usa e , pois isso garante que o erro seja minimizado em torno de .
Resultado final: Supondo que o atraso fosse de 2 segundos, :
2. Aproximação de Padé de 2ª Ordem para
Agora, aproximamos por uma função racional quadrática:
Passos para a Dedução
Expansão em Série de Taylor de (até 2ª ordem):
Expansão em Série de Taylor de :
Igualando os coeficientes com : Obtemos o sistema:
Critério de Padé (simetria e minimização do erro):
- Escolha (simetria).
- Resolvendo, obtém-se:
Resultado final: Supondo que o atraso fosse de 2 segundos, :
Resumo das Fórmulas Gerais
| Ordem | Aproximação de Padé para |
|---|---|
| 1ª ordem | |
| 2ª ordem |
Observações:
- Quanto maior a ordem, melhor a aproximação, mas mais complexa a função.
- A 1ª ordem introduz um zero no semiplano direito (comportamento não mínimo de fase).
- A 2ª ordem captura melhor o atraso, mas ainda tem algum erro em altas frequências.
Exemplo:
Como seria usada a aproximação de Padé para considerar um atraso de transporte de uns 2 segundos num sistema de primeira ordem com constante de tempo de 1 minuto? Considere mostrar equações e eventualmente realizar simulações usando Matlab.
Aproximação de Padé para um Atraso de Transporte
Um atraso puro pode ser aproximado por uma função racional usando Padé. Para um atraso de segundos, a aproximação de Padé de 1ª ordem é:
E a de 2ª ordem (mais precisa):
Sistema de 1ª Ordem com Atraso
Considere um sistema de primeira ordem com constante de tempo minuto (60 segundos) e ganho estático :
Substituindo o atraso pela aproximação de Padé de 1ª ordem:
Simulação no MATLAB
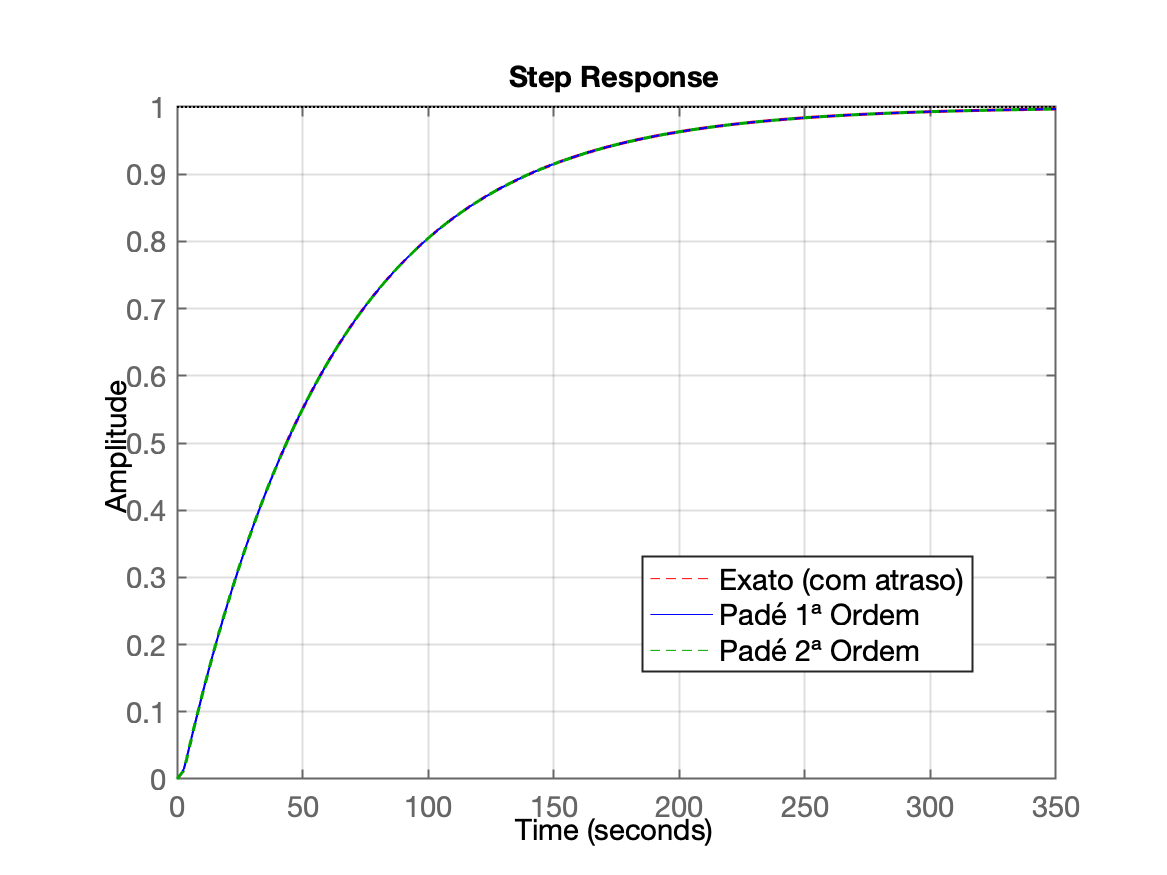
Podemos comparar a resposta ao degrau do sistema exato (usando a função pade() no MATLAB) e da aproximação:
xxxxxxxxxx% Sistema original com atrasos = tf('s');G = 1 / (60*s + 1) * exp(-2*s);% Aproximação de Padé de 1ª ordem[num_pade, den_pade] = pade(2, 1); % Atraso de 2s, ordem 1Pade1 = tf(num_pade, den_pade);G_approx1 = 1 / (60*s + 1) * Pade1;% Aproximação de Padé de 2ª ordem[num_pade2, den_pade2] = pade(2, 2); % Atraso de 2s, ordem 2Pade2 = tf(num_pade2, den_pade2);G_approx2 = 1 / (60*s + 1) * Pade2;% Simulação da resposta ao degraufigure;step(G, 'r--', G_approx1, 'b', G_approx2, 'g--');legend('Exato (com atraso)', 'Padé 1ª Ordem', 'Padé 2ª Ordem');grid on;Resultados Esperados
- A aproximação de 1ª ordem introduz um zero no semiplano direito (comportamento não mínimo de fase), causando um "mergulho" inicial na resposta.
- A aproximação de 2ª ordem é mais precisa e suaviza esse efeito.
- Quanto maior a ordem de Padé, melhor a aproximação, mas maior a complexidade do modelo.
Resultados obtidos
Resposta ao degrau para os 3 sistemas:
| Primeiros 10 segundos | Intervalo final |
|---|---|
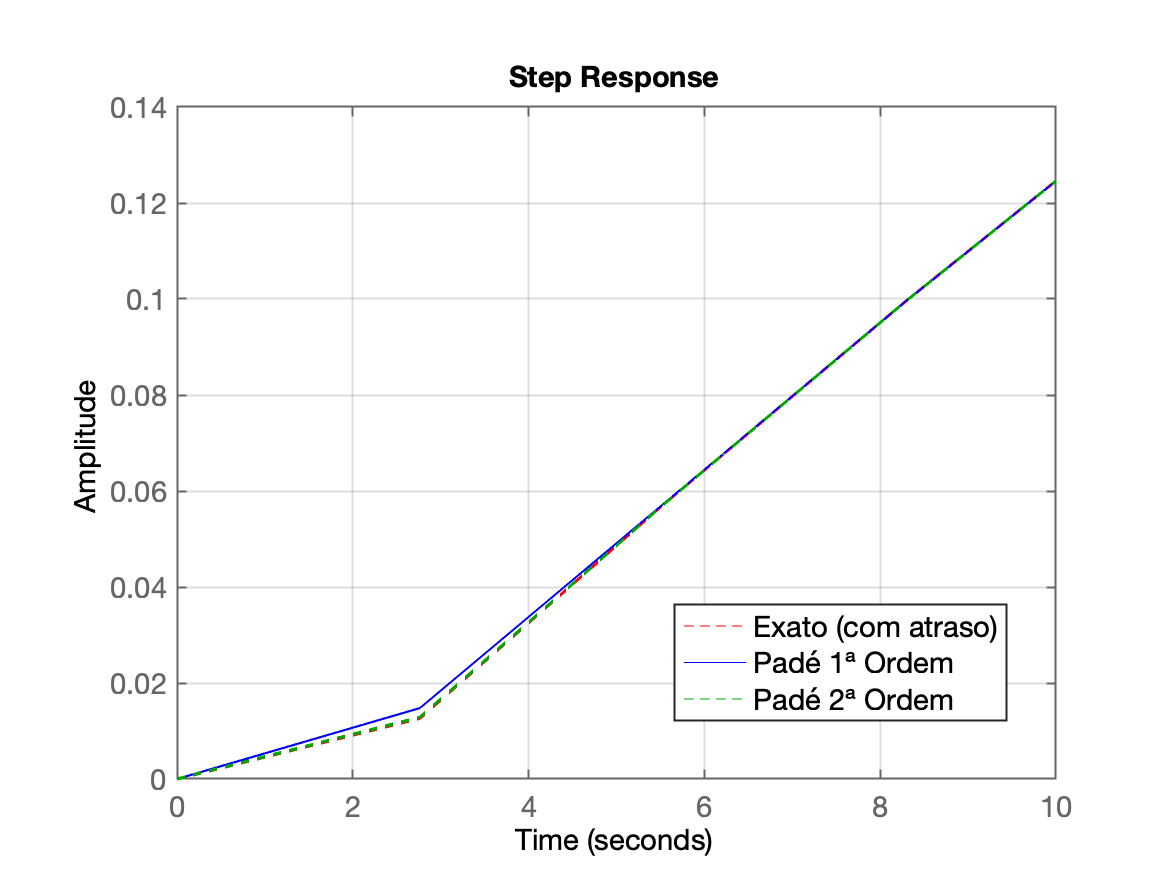 | 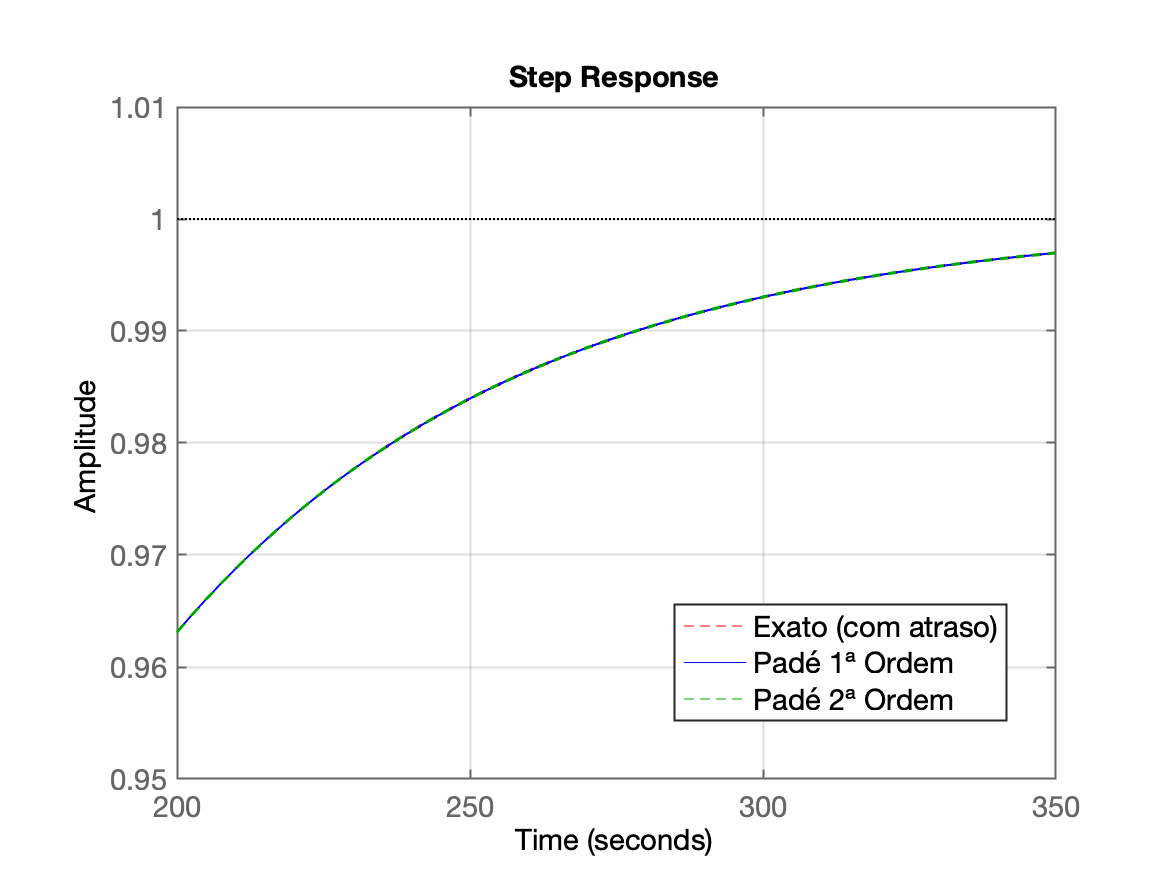 |
xlim([0 10]) | axis([200 350 0.95 1.01]) |
Note:
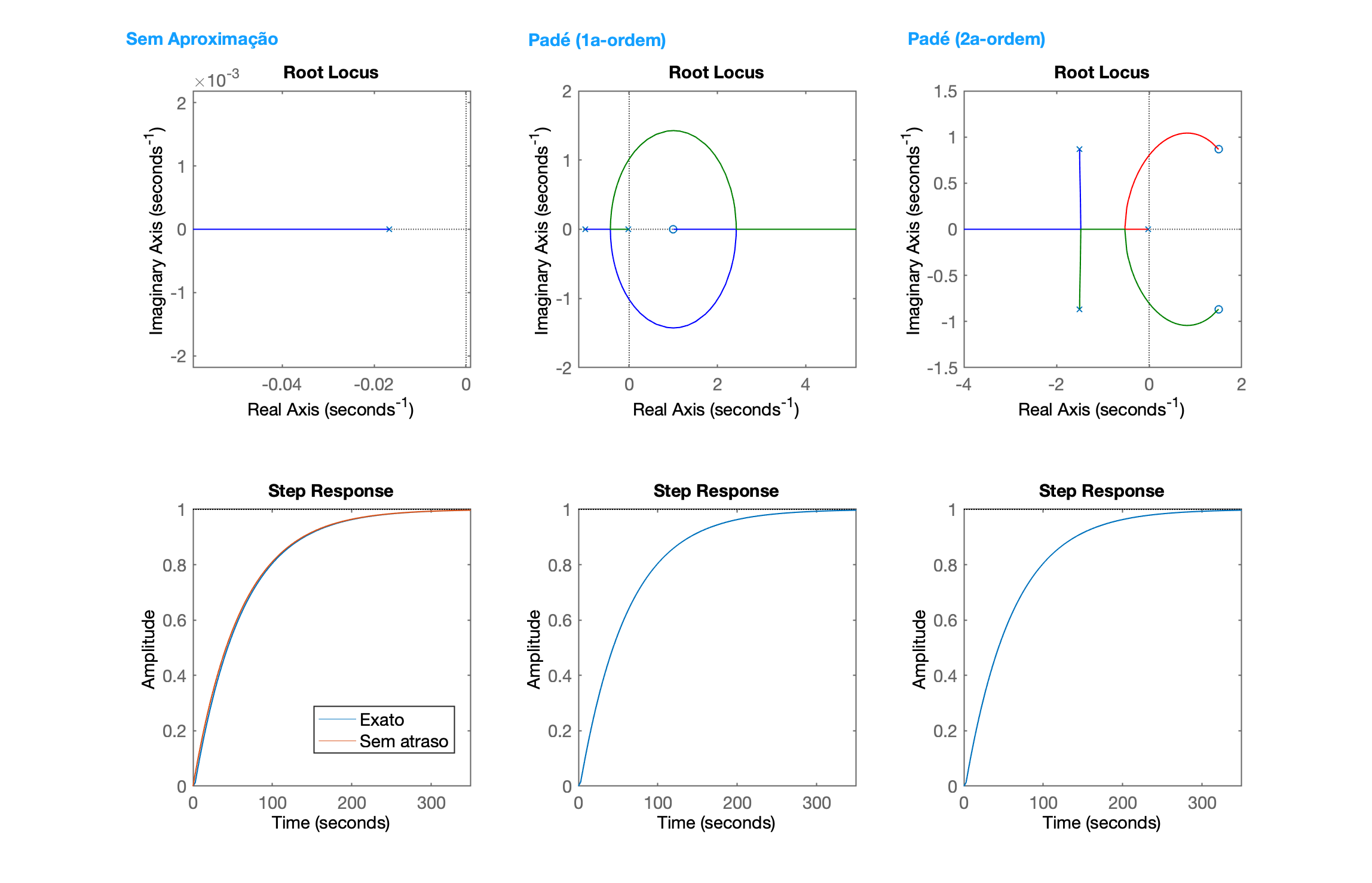
>> zpk(G) % função transferência do sistema com o atraso 0.016667 exp(-2*s) * ----------- (s+0.01667) Continuous-time zero/pole/gain model.>> % Podemos incluir uma função similar sem o atraso:>> Gr=tf(1, [60 1]);>> zpk(Gr)ans = 0.016667 ----------- (s+0.01667) Continuous-time zero/pole/gain model.>> zpk(Pade1) - (s-1) ------- (s+1) Continuous-time zero/pole/gain model.>> zpk(Pade2) (s^2 - 3s + 3) -------------- (s^2 + 3s + 3) Continuous-time zero/pole/gain model.>> % Observando as tf's das funções aproximadas:>> zpk(G_approx1) % aproximação Pade de 1a-ordem -0.016667 (s-1) ----------------- (s+1) (s+0.01667) Continuous-time zero/pole/gain model.>> zpk(G_approx2) % aproximação Pade de 2a-ordem 0.016667 (s^2 - 3s + 3) -------------------------- (s+0.01667) (s^2 + 3s + 3) Continuous-time zero/pole/gain model.>> Mas mais interessante é perceber o RL e corresponde resposta temporal ao degrau:
x
>> % Gráfico comparativo>> subplot(2,3,1) % 2 linhas, 3 colunas, 1a-célula:>> rlocus(Gr)>> subplot(2,3,4)>> step(G, Gr)>> legend('Com atraso', 'Sem atraso')>> subplot(2,3,2)>> rlocus(G_approx1)>> subplot(2,3,5)>> step(G_approx1)>> subplot(2,3,3)>> rlocus(G_approx2)>> subplot(2,3,6)>> step(G_approx2)>> subplot(2,3,4)>> xlim([0 350])>> step(G,Gr)>> axis([0 350 0 1])>> legend('Exato', 'Sem atraso')
Conclusão
A aproximação de Padé permite substituir o atraso por uma função racional, facilitando análises no domínio da frequência e projeto de controladores. No entanto, ordens baixas podem introduzir distorções, então deve-se escolher a ordem adequada conforme a precisão desejada.
Resumo
Fico feliz que tenha gostado da explicação! A aproximação de Padé é uma ferramenta poderosa para lidar com atrasos em sistemas de controle, e entender sua dedução ajuda muito na aplicação prática.
Recapitulando
Padé de 1ª ordem:
- Aproxima como .
- Simples, mas introduz um zero no semiplano direito (resposta inicial "inversa", sistema de fase não mínima).
Padé de 2ª ordem:
- Aproxima como .
- Mais precisa, especialmente para atrasos maiores.
Se quiser explorar mais
- Podemos comparar ordens superiores (3ª, 4ª...) para ver como a aproximação melhora.
- Podemos analisar o erro de fase em diferentes frequências.
- Podemos aplicar isso em projeto de controladores (como PID com compensação de atraso).
- Wikipedia: Padé approximant.
Fernando Passold, em 15/05/2025